一种结构参数未知条件下的感应电机转速估计方法
本发明涉及感应电机转速估计,尤其涉及一种结构参数未知条件下的感应电机转速估计方法。
背景技术:
1、感应电动机具有结构简单、可靠性高、成本较低等优势,作为动力源被广泛应用于诸多工业装备、运载工具、市政设施的传动链中,其安全稳定运行对于保障设备功能与质量至关重要。电机转速信息是辨识故障频率特征的基础,是有效开展传动链监测诊断的必备条件。然而,感应电动机的滑差率与转速通常是未知的,且额外加装转速传感器将增加总体成本并降低整体可靠性。无转速传感器的感应电机转速估计,是制约电传动链监测诊断技术发展的关键难题,一直以来备受工业界关注。
2、现有感应电机转速估计方法包含基于模型和观测器的方法、基于电流频域特征分析的方法两类。其中,基于模型和观测器的方法不仅需要同时测量供电电压与电流,还需要知道准确的电机内部结构参数,如定子绕组的电阻值。然而,这些参数不仅难以获取,而且可能随环境温度变化而变化,所产生的偏移对转速估计造成较大误差。因此,这类方法主要应用在电机控制系统的设计阶段中,对于内部物理结构参数未知的传动链而言,难以直接用于监测诊断。基于电流频域特征分析的转速估计方法以定子电流中包含的机械调制特征为基础,通过特征频率辨识反推转速信息。其优点是不依赖时变结构参数,且所需的单相定子电流容易从供电线路或控制系统中获取。因此,基于电流频域特征分析的转速估计方法在传动链监测诊断领域具有较大潜力。
3、中国发明专利cn 115586345 b公布了一种基于定子电流频域特征分析的转速估计方法。首先,根据定子电流信号频谱,识别幅值最大的频率成分为供电频率;其次,对定子电流信号进行低通滤波并计算幅值包络谱;再次,根据铭牌上的额定转速、基于已知极对数和供电频率计算得到的同步转速、人为给定的劣化因子转速,制定转速识别范围;最后,根据转速识别范围,从幅值包络谱中识别对应范围内的谱峰,作为转速频率。
4、上述方法的核心是在频域上识别电机转速对供电频率的调制作用。在工程实际中,转轴偏心/不对中或磁场不对称常常难以避免,因此转速调制作用通常容易被识别。然而,该方法对实际定子电流结构做了过于简单的假设。实际传动链中,尤其是在包含机械故障的状态下,存在周期性的扭矩波动,该波动频率同样对供电频率造成调制作用。因此,电流信号的幅值包络谱中通常包含多个特征频率谱峰。由于感应电机的滑移率和转速在不同负载条件下分布范围较广,因此无法将转速频率和故障特征频率区分开,容易得到错误的转速估计结果。此外,该方法需要已知电机极对数或特定工况下的额定转速,但在实际应用中常常无法获取。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种结构参数未知条件下的感应电机转速估计方法,能够在不提供任何电机结构参数的条件下,仅基于电流信号的频率结构,区分转速调制和其它特征频率调制,从而实现转速的准确辨识。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种结构参数未知条件下的感应电机转速估计方法,包括以下步骤:
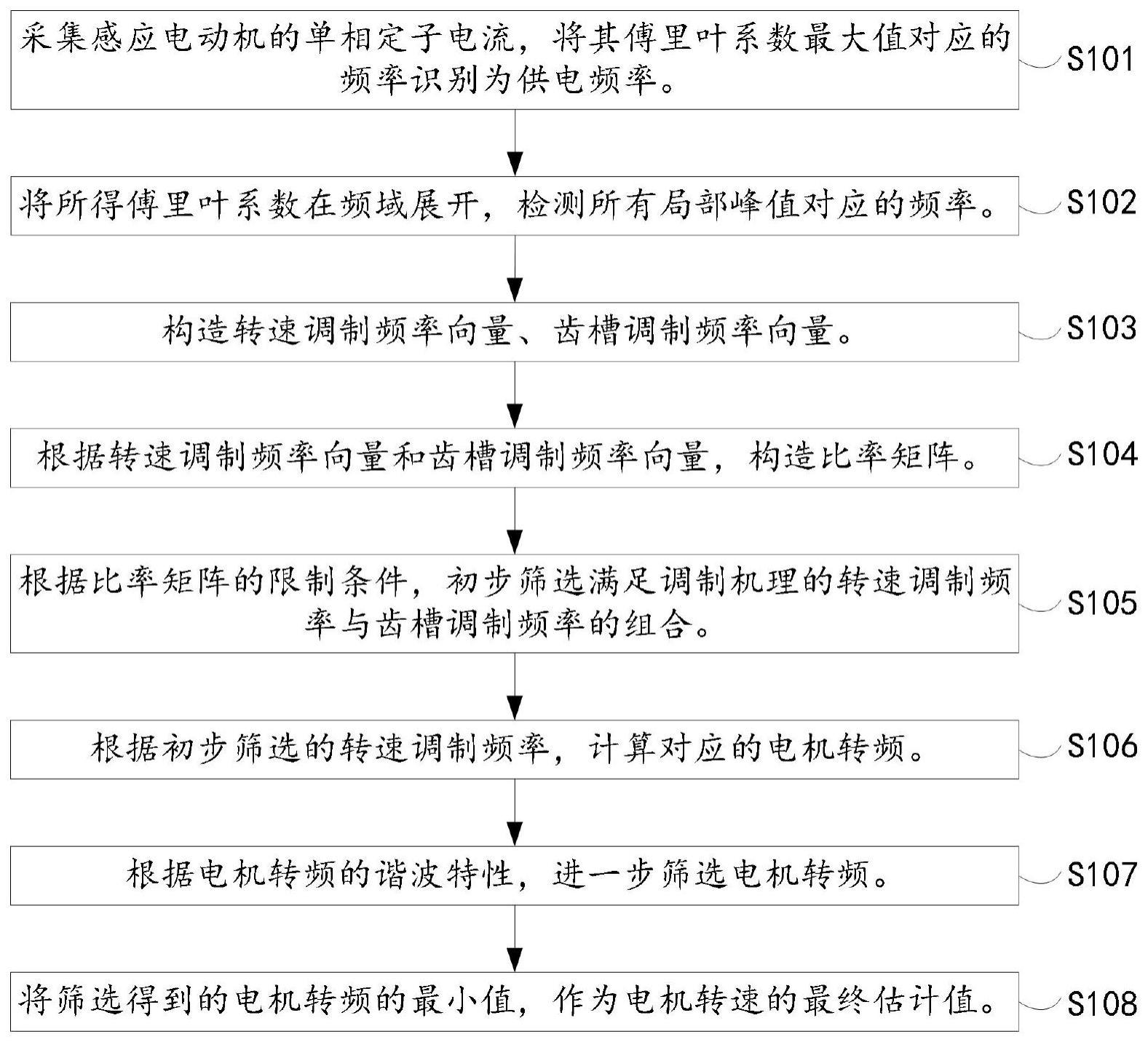
4、s101、采集感应电动机的单相定子电流,将其傅里叶系数向量中最大值对应的频率识别为供电频率;
5、s102、将所得傅里叶系数向量在频域上展开,检测所有对应的局部频率峰值,得到局部频率峰值向量;
6、s103、基于检测得到的局部频率峰值向量,构造转速调制频率向量、齿槽调制频率向量;
7、s104、根据转速调制频率向量和齿槽调制频率向量,构造比率矩阵;
8、s105、根据比率矩阵的限制条件,初步筛选满足调制机理的转速调制频率与齿槽调制频率的组合;
9、s106、根据初步筛选的转速调制频率,计算对应的电机转频;
10、s107、根据电机转频的谐波特性,进一步筛选电机转频;
11、s108、将筛选得到的电机转频中的最小值,作为电机转速的最终估计值。
12、优选地,步骤s101包括:
13、采集感应电动机的单相定子电流信号x[t];
14、对采集的单相定子电流信号x[t]加汉宁窗后进行离散傅里叶变换,得到傅里叶系数向量x[f];其中f=[fs/n:fs/n:fs]是与傅里叶系数对应的频率向量,fs代表电流信号采样频率,n代表电流信号数据点长度,t代表时间;
15、识别傅里叶系数向量x[f]中的最大值,将其对应的频率f识别为供电频率fsupply,即
16、fsupply=f|x[f]=max{x[f]}。 (1)
17、优选地,步骤s102包括:
18、从傅里叶系数向量中提取所有局部频率峰值,得到局部频率峰值向量fpeak;具体方法为:
19、a)对傅里叶系数向量x[f]求导,得到导数向量x’[f]=x[f]-x[f-1],x[0]=nan;
20、b)对导数向量x’[f]进行符号标定,得到符号导数向量sx’[f]
21、
22、c)对符号导数向量sx’[f]求导,得到二阶导数向量x”[f]=sx’[f]-sx’[f-1],sx’[0]=0;
23、d)搜索二阶导数向量x”[f]中值为-2的成分,将其对应的f作为谱峰频率,得到局部频率峰值向量fpeak=[fpeak1,fpeak2,...fpeakm...fpeakm],其中m=1,2,...m,m代表搜索得到的谱峰频率的个数。
24、优选地,步骤s103包括:
25、从局部频率峰值向量fpeak中挑选转速调制频率向量frotate和齿槽调制频率向量fslot,如下:
26、
27、
28、优选地,步骤s104包括:
29、令转速调制频率向量frotate的长度为a,齿槽调制频率向量fslot的长度为b,计算比率矩阵
30、r(a,b)=[fslot(b)-fsupply]/[frotate(a)-fsupply] (5)
31、其中a=1,2,...a,且b=1,2,...b。
32、优选地,步骤s105包括:
33、根据比率矩阵的数值,从中筛选符合以下要求的矩阵元素:
34、r(a',b')=r(a,b)|r(a,b)>l,and0.5-abs{0.5-mod[r(a,b),1]}<threshold (6)
35、其中abs代表求绝对值,mod(r(a,b),1)代表计算r(a,b)除以1的余数;式中l是可调参数,含义为最小齿槽数;threshold是可调参数,含义为取整阈值;据此得到的(a’,b’)组合,即是基于傅里叶系数搜索得到的满足调制机理的转速调制频率与齿槽调制频率的组合。
36、优选地,步骤s106包括:
37、基于上述筛选的转速调制频率,计算对应的电机转频,得到电机转频向量fmotor=frotate(a’)-fsupply。
38、优选地,步骤s107包括:
39、由于实际电机转频的倍频也满足上述调制机理要求,因此进一步从电机转频向量fmotor中筛选电机转频与其2倍频都在向量中的成分:
40、
41、优选地,步骤s108包括:
42、若fmotor2包含多个元素,则选取其中的最小值,作为电机转速的最终估计值
43、festimate=min(fmotor2)。 (8)
44、与现有技术相比,本发明提供的技术方案具有以下有益效果:
45、(1)无需任何电机结构参数如极对数、齿槽数,仅基于单相定子电流信号,即可根据调制结构匹配关系,辨识转速信息。
46、(2)适用于健康和故障状态下的感应电机传动链,即当调制频率成分不仅包括电机转频,还包括未知的故障频率时,该方法依然能够基于调制关系,有效区分电机转频和故障频率,从而可靠地识别电机转速信息。
- 还没有人留言评论。精彩留言会获得点赞!