一种数据驱动的储能逆变器电压预测控制方法
本发明涉及储能变流器,特别是涉及一种数据驱动的储能逆变器电压预测控制方法。
背景技术:
1、近年来,随着分布式能源的日益普及,储能逆变器的应用得到了越来越多的关注,基于lc(无源)滤波的储能逆变器通常作为可控电压源,提供稳定可靠的电压支撑;为了改善逆变器输出电压性能,研究人员提出了多种控制方法,传统的线性控制广泛应用于并网逆变器中,其采用多回路结构来跟踪参考点和抑制干扰,但动态性能有限。
2、其中,模型预测控制(model predictive control, mpc)由于其处理非线性和约束的能力,成为控制电力电子系统中一种很有前景的方法。
3、与传统线性控制器相比,mpc具有更好的动态性能,同时在目标函数和约束方面也具有更大的灵活性,基于mpc的逆变器电压控制方法在文献[p. cortes, g. ortiz, j. i.yuz, j. rodriguez, s. vazquez and l. g. franquelo, "model predictive controlof an inverter with output lc filter for ups applications," ieee trans. ind.electron., vol. 56, no. 6, pp. 1875-1883, june 2009.]中首次报道,其中将高阶状态空间系统离散化作为预测模型,寻求最优电压矢量。
4、为了进一步改善输出电压性能,文献[c. zheng, , and f. blaabjerg, "constrained modulated model-predictive control of an lc-filtered voltage-source converter," ieee trans. power electron., vol. 35, no.2, pp. 1967-1977, feb. 2020.]采用双目标代价函数来抑制lc滤波器的谐振效应,此外,在文献[c. zheng,, z. zhang, j. rodriguez and f. blaabjerg, "modelpredictive control of lc-filtered voltage source inverters with optimalswitching sequence," ieee trans. power electron., vol. 36, no. 3, pp. 3422-3436, march 2021.]中,每个控制周期施加三个电压矢量以改善电压性能,其持续时间根据系统模型计算。然而,在参数不匹配的情况下,持续时间的计算和预测都会受到影响。
5、mpc的一个主要挑战是它对参数不匹配的敏感性,这可能导致性能差和不稳定,研究人员已经提出了各种方法来解决这个问题,包括以下两种类型的mpc:一种方法是在线辨识系统参数;另一种方法通过在价值函数或约束中加入不确定性集来保证参数不确定性下的稳定性和输出性能。
6、然而,这些方法往往存在计算复杂度高和收敛速度有限的问题,因此,进一步研究mpc方法的改进方式,以处理参数的不确定性带来的影响,提高mpc在各类参数条件下的应用能力是十分必要的。
技术实现思路
1、本发明的目的在于,提供一种数据驱动的储能逆变器电压预测控制方法,可以消除系统参数对电压预测和作用时间计算的影响。
2、为解决上述技术问题,本发明提供一种数据驱动的储能逆变器电压预测控制方法,包括:
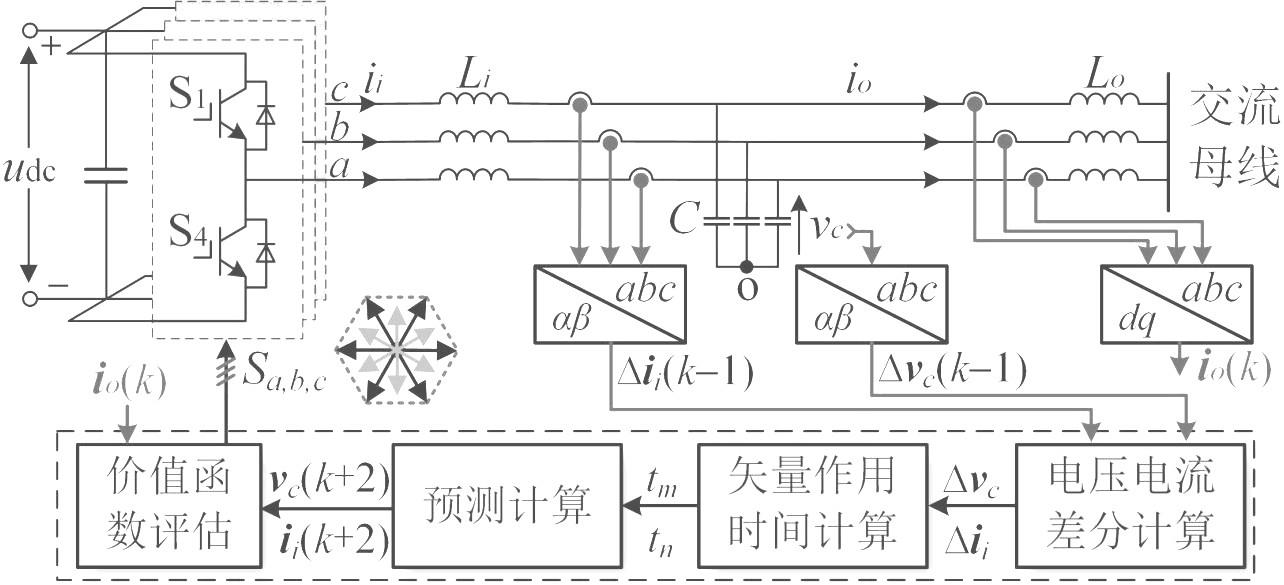
3、建立逆变器在三相坐标系下的数学模型,根据所述逆变器三相开关管状态得到八个基本矢量,建立所述逆变器在两相静止坐标系下的数学模型,并根据所述八个基本矢量合成六个虚拟矢量;
4、利用测量得到的电压和电流差分数据构建状态空间方程,更新每个所述基本矢量的电压和电流差分数据;
5、根据更新的电压和电流差分数据,计算每个三矢量的作用时间,计算得到所述六个虚拟矢量对应的电压预测值,将所述电压预测值代入价值函数,选出最优矢量,将所述最优矢量作用在下一个控制周期。
6、可选的,所述建立逆变器在三相坐标系下的数学模型包括:根据逆变器拓扑,建立逆变器在abc三相坐标系下的数学模型,表示为:
7、;
8、其中,li为逆变器侧滤波电感,lo为负载侧电感,c为滤波电容,iiabc为abc坐标系下的逆变器侧电流,ioabc为abc坐标系下的负载侧电流,vcabc为abc坐标系下的电容电压,viabc为abc坐标系下的逆变器输出电压,voabc为abc坐标系下的负载侧电压,t为时间。
9、可选的,根据克拉克变换,建立逆变器在两相静止坐标系下的数学模型,表示为:
10、;
11、其中,li为逆变器侧滤波电感,lo为负载侧电感,c为滤波电容,iiαβ为αβ静止坐标系下的逆变器侧电流,ioαβ为αβ静止坐标系下的负载侧电流,vcαβ为αβ静止坐标系下的电容电压,viαβ为αβ静止坐标系下的逆变器输出电压,voαβ为αβ静止坐标系下的负载侧电压。
12、可选的,所述构建状态空间方程,更新每个所述基本矢量的电压和电流差分数据包括利用两个时刻的电流采样和电容电压采样作差,得到逆变器侧电流差分和电容电压差分,表示为:
13、;
14、其中,△vcαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下采样的电容电压差分,△iiαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下采样的逆变器侧电流差分,vcαβ(k-1)表示k-1时刻αβ静止坐标系下采样的电容电压,vcαβ(k)表示k时刻αβ静止坐标系下采样的电容电压,iiαβ(k-1)表示k-1时刻αβ静止坐标系下采样的逆变器侧电流,iiαβ(k)表示k时刻αβ静止坐标系下采样的逆变器侧电流。
15、可选的,当所述逆变器每个控制周期应用三个基本矢量时,电容电压差分和逆变器侧电流差分由三个基本矢量对应的电压和电流梯度组合而成,因此逆变器侧电流差分和电容电压差分表示为:
16、;
17、其中,△vcmαβ(k-1)、△vcnαβ(k-1)和△vczαβ(k-1)分别表示k-1时刻至k时刻αβ静止坐标系下基本矢量vmαβ、vnαβ和vzαβ对应的电容电压差分,△iimαβ(k-1)、△iinαβ(k-1)和△iizαβ(k-1)分别表示k-1时刻至k时刻αβ静止坐标系下基本矢量vmαβ、vnαβ和vzαβ对应的逆变器侧电流差分,tm、tn和tz分别表示基本矢量vmαβ、vnαβ和vzαβ在每个控制周期的作用时间,ts表示控制周期。
18、可选的,测量得到的电容电压差分和逆变器侧电流差分为虚拟矢量对应的差分数据,将所述虚拟矢量替换为零电压矢量,当所述虚拟矢量和所述零电压矢量在α轴静止坐标系的坐标分量相等时,其对应的电压和电流差分也相等并表示为:
19、;
20、其中,△vczα(k-1)表示k-1时刻至k时刻α静止坐标系下基本矢量vzα对应的电容电压差分,△vcα(k-1)表示k-1时刻至k时刻α静止坐标系下采样的电容电压差分,△iizα(k-1)表示k-1时刻至k时刻α静止坐标系下基本矢量vzα对应的逆变器侧电流差分,△iiα(k-1)表示k-1时刻至k时刻α静止坐标系下采样的逆变器侧电流差分。
21、可选的,当所述虚拟矢量和所述零电压矢量的坐标分量不相等时,所述零电压矢量对应的电压和电流差分表示为:
22、;
23、其中,△vczα(k-1)表示k-1时刻至k时刻α静止坐标系下基本矢量vzα对应的电容电压差分,△vczα(k-2)表示k-2时刻至k-1时刻α静止坐标系下基本矢量vzα对应的电容电压差分,△vcα(k-1)表示k-1时刻至k时刻α静止坐标系下采样的电容电压差分,△vcα(k-2)表示k-2时刻至k-1时刻α静止坐标系下采样的电容电压差分,△iizα(k-1)表示k-1时刻至k时刻α静止坐标系下基本矢量vzα对应的逆变器侧电流差分,△iizα(k-2)表示k-2时刻至k-1时刻α静止坐标系下基本矢量vzα对应的逆变器侧电流差分,△iiα(k-1)表示k-1时刻至k时刻α静止坐标系下采样的逆变器侧电流差分,△iiα(k-2)表示k-2时刻至k-1时刻α静止坐标系下采样的逆变器侧电流差分,vzα(k-1)表示k-1时刻α静止坐标系下基本矢量vzα对应的坐标分量,vzα(k-2)表示k-2时刻α静止坐标系下基本矢量vzα对应的坐标分量,vsα(k-1)表示k-1时刻α静止坐标系下虚拟矢量vsα对应的坐标分量,也即表示k-1时刻α静止坐标系下逆变器输出的虚拟电压矢量;vsα(k-2)表示k-2时刻α静止坐标系下虚拟矢量vsα对应的坐标分量,也表示k-2时刻α静止坐标系下逆变器输出的虚拟电压矢量。
24、可选的,剩余非零电压矢量的α轴坐标分量或β轴坐标分量与所述零电压矢量的坐标分量相等时,即其电压和电流差分也相等并表示为:
25、;
26、或,
27、;
28、其中,△vcjα(k-1)和△vcjβ(k-1)分别表示k-1时刻至k时刻α、β静止坐标系下剩余非零电压矢量vjα、vjβ对应的电容电压差分,j∈{1,…, 6},△iijα(k-1)和△iijβ(k-1)分别表示k-1时刻至k时刻α、β静止坐标系下剩余非零电压矢量vjα、vjβ对应的逆变器侧电流差分,△vczα(k-1)和△vczβ(k-1)分别表示k-1时刻至k时刻α、β静止坐标系下基本矢量vzα对应的电容电压差分,△iizα(k-1)和△iizβ(k-1)分别表示k-1时刻至k时刻α、β静止坐标系下基本矢量vzα对应的逆变器侧电流差分。
29、可选的,当剩余非零电压矢量的α轴坐标分量或β轴坐标分量与零电压矢量的坐标分量不相等时,将虚拟电压矢量替换为剩余非零电压矢量,剩余非零电压矢量的轴坐标分量或轴坐标分量与零电压矢量的坐标分量不相等,即vjαβ不等于vzαβ,所述剩余非零电压矢量的电压和电流差分表示为:
30、;
31、其中,△vcjαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下剩余非零电压矢量vjαβ对应的电容电压差分,△vcjαβ(k-2)表示k-2时刻至k-1时刻αβ静止坐标系下剩余非零电压矢量vjαβ对应的电容电压差分,△vczαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下零电压矢量vzαβ对应的电容电压差分,△iijαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下剩余非零电压矢量vjαβ对应的逆变器侧电流差分,△iijαβ(k-2)表示k-2时刻至k-1时刻αβ静止坐标系下剩余非零电压矢量vjαβ对应的逆变器侧电流差分,△iizαβ(k-1)表示k-1时刻至k时刻αβ静止坐标系下零电压矢量vzαβ对应的逆变器侧电流差分。
32、可选的,基于所述虚拟矢量的合成方式及所述虚拟矢量对应的电压差分数据,k+1时刻的电容电压预测和逆变器侧电流预测表示为:
33、;
34、其中,vcαβ(k+1)表示k+1时刻αβ静止坐标系下预测的电容电压,vcαβ(k)表示k时刻αβ静止坐标系下采样的电容电压,iiαβ(k+1)表示k+1时刻αβ静止坐标系下预测的逆变器侧电流,iiαβ(k)表示k时刻αβ静止坐标系下采样的逆变器侧电流,tm、tn和tz分别表示基本矢量vmαβ、vnαβ和vzαβ在每个控制周期的作用时间,ts表示控制周期,△vcmαβ(k)、△vcnαβ(k)和△vczαβ(k)分别表示k时刻至k+1时刻αβ静止坐标系下基本矢量vmαβ、vnαβ和vzαβ对应的电容电压差分,△iimαβ(k)、△iinαβ(k)和△iizαβ(k)分别表示k时刻至k+1时刻αβ静止坐标系下基本矢量vmαβ、vnαβ和vzαβ对应的逆变器侧电流差分。
35、可选的,计算每个三矢量的作用时间的过程包括将所述电容电压预测带入下式中:
36、;
37、其中,gv为电容电压价值函数,tm、tn分别表示基本矢量vmαβ、vnαβ在每个控制周期的作用时间;
38、解得tm,tn和tz并表示为:
39、;
40、其中,tm、tn和tz分别表示基本矢量vmαβ、vnαβ和vzαβ在每个控制周期的作用时间,ts表示控制周期,和分别为α、β静止坐标系下电容电压参考,△vcmα、△vcnα和△vczα分别表示α静止坐标系下基本矢量vmα、vnα和vzα对应的电容电压差分,△vcmβ、△vcnβ和△vczβ分别表示β静止坐标系下基本矢量vmβ、vnβ和vzβ对应的电容电压差分。
41、可选的,选择价值函数值最小的虚拟矢量作为最优矢量,所述价值函数为:
42、;
43、其中,g为价值函数,λ为权重因子,和分别为α、β静止坐标系下电容电压参考,和分别为α、β静止坐标系下逆变器侧电流参考,vcα(k+2)表示k+2时刻α静止坐标系下预测的电容电压,vcβ(k+2)表示k+2时刻β静止坐标系下预测的电容电压,iiα(k+2)表示k+2时刻α静止坐标系下预测的逆变器侧电流,iiβ(k+2)表示k+2时刻β静止坐标系下预测的逆变器侧电流。
44、相比于现有技术,本发明至少具有以下有益效果:该发明通过采样测量的电压和电流差分数据替代传统模型预测控制中基于数学模型计算的电压和电流梯度,从而消除了系统参数对电压预测和作用是将计算的影响,提高了参数鲁棒性;基于应用的三个矢量,提出了电压电流差分数据实时更新的状态空间方程组,实现了每个控制周期中所有电压电流差分数据的实时更新,保证了差分数据的准确性,进而保障了矢量时间计算和电压预测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!