一种输电巡检系统及其使用方法与流程
本发明属于输电巡检,具体涉及一种输电巡检系统及其使用方法。
背景技术:
1、电力建设正在飞速发展,架空输电线路巡检是保证电网安全运行的关键技术手段,传统的巡检主要依赖人工,巡检劳动强度大,巡检质量会受到作业人员主观因素影响,在恶劣环境下巡检范围受到很大限制。随着特高压输电系统的快速建设,特高压线路杆塔呼高一般超过50米,使用望远镜的人工巡检已很难准确观察和识别设备缺陷,线路巡检管理是有效保证输电线路及其设备安全的一项基础工作。通过巡视检查能掌握线路运行状况及周围环境的变化,及时发现设备缺陷和危及线路安全的隐患,提出具体检修意见,以便及时消除缺陷、预防事故发生或将事故限制在最小范围内,从而保证输电线路安全和稳定运行,然而市面上各种的输电巡检仍存在各种各样的问题。
2、如授权公告号为cn107316351a所公开的一种输电线路的巡检方法及巡检系统,其虽然实现了巡检装置上安装一gps定位单元以及位置计算单元,在gps定位单元正常工作时,通过gps记录下数据的采集位置,如此数据与位置信息相对应,在gps定位单元失效时间段内,根据自行走的滑行速度在时间上的积分、gps定位单元失效时的位置信息以及gps定位单元恢复正常时的位置信息计算得到巡检系统的位置信息,如此数据也与位置信息相对应,保证巡检时的采集数据与位置信息一直相对应,巡检效率高,且不容易出错,但是并未解决现有巡检过程中存在的不能够有效的实现对数据信息进行计算处理,不能够实现多种方式的检测等的问题,为此我们提出一种输电巡检系统及其使用方法。
技术实现思路
1、本发明的目的在于提供一种输电巡检系统及其使用方法,以解决上述背景技术中提出的问题。
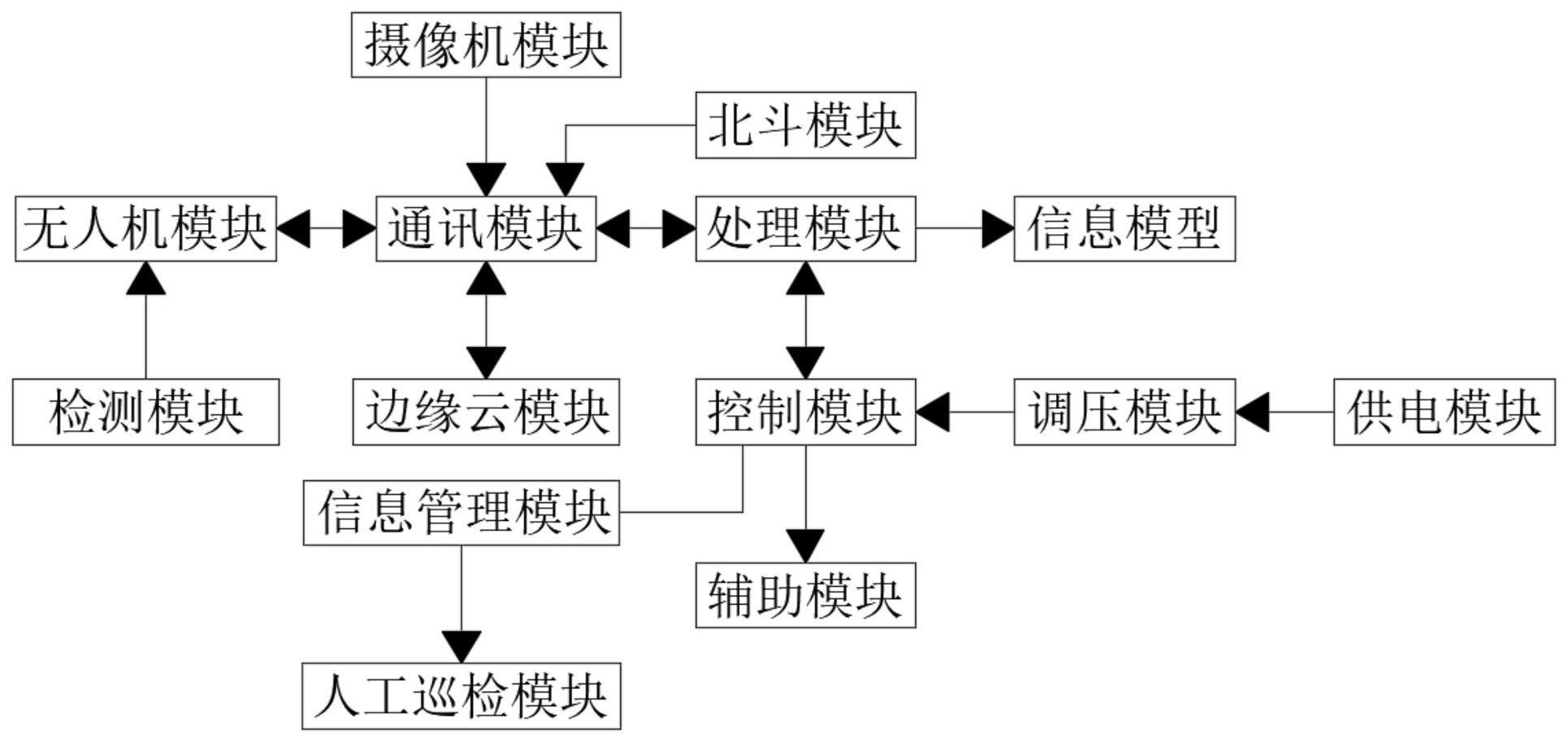
2、为实现上述目的,本发明提供如下技术方案:一种输电巡检系统,包括控制模块,控制模块上电性连接有处理模块,处理模块上电性连接有通讯模块,通讯模块上通讯连接有边缘云模块、摄像机模块和无人机模块,无人机模块中包括有检测模块,处理模块用于实现对接收的数据信息和指令进行计算处理,通讯模块用于实现对数据信息和指令进行传输,摄像机模块用于安装在输电架上,用于实现对输电架上的绝缘子连接处进行拍摄检测,无人机模块用于实现对输电线进行巡检,检测模块用于实现对输电线的各种情况进行巡检和记录;
3、处理模块上电性连接有信息模型,信息模型基于人工智能、深度学习的图像识别、目标识别算法和故障识别算法,边缘云模块用于实现对数据分析处理;
4、控制模块上电性连接有信息管理模块,信息管理模块用于实现对巡检结果进行记录,便于后续对巡检内容进行查询和管理;
5、控制模块上电性连接有北斗模块,北斗模块用于实现对无人机模块和摄像机模块进行定位,并且实现导航无人机模块的运行轨迹;
6、无人机模块基于预设的巡检路径在北斗导航下进行日常巡检,机载图像识别算法完成简单目标识别,当出现障碍物时,无人机模块根据识别结果进行路径规划,完成避障飞行;仅当出现疑似缺陷目标时,无人机模块将图像回传至信息模型,完成目标和缺陷的精细识别。
7、优选的,控制模块上电性连接有调压模块,调压模块上电性连接有供电模块,供电模块用于实现对供电,供电模块还用于实现对无人机模块进行充电。
8、优选的,调压模块中包括有磁感线路、降压电路、整流电路、滤波电路和稳压电路,磁感线路与输电线互感连接,磁感线路与降压电路电性连接,降压电路用于实现对降低供电电压,整流电路用于实现将交流电压转换成直流电压,滤波电路用于实现对直流电压中的交流电压进行滤除,稳压电路与控制模块电性连接,稳压电路用于实现稳定电压的输出。
9、优选的,控制模块上电性连接有辅助模块,辅助模块中包括有显示模块、控制按键、报警模块、指示模块和存储模块,显示模块用于实现对数据信息进行显示,控制按键用于实现对系统进行控制调节,报警模块用于实现在检测出输电线路出现故障或者异常的时候进行报警,报警模块采用的是声光报警器。
10、优选的,指示模块用于实现对系统的运行状态进行显示,指示模块中包括有故障灯、运行指示灯和通讯指示灯,存储模块中包括有rom存储器、ram存储器和缓存存储器,rom存储器用于实现对系统的运行程序体进行存储,ram存储器用于实现对系统的运行日志进行存储,缓存存储器用于实现对数据信息进行缓存。
11、优选的,信息管理模块上电性连接有人工巡检模块,人工巡检模块用于实现对人工巡检结果和修复结果进行录入存储,信息管理模块中包括有故障点、故障信息、故障问题、修复人员信息、修复方案和巡检方式。
12、优选的,人工智能采用的是神经网络算法,神经网络算法中若x1—xn是从其他神经元传来的输入信号,wij表示从神经元j到神经元i的连接权值,θ表示一个阈值(或者称为偏置),则神经元i的输入与输出的关系表示为:
13、
14、yi=f(neti)
15、yi表示神经元i的输出,函数f称为激活函数或转移函数,net称为净激活,若将阈值看成神经元i的一个输入x0的权重wi0,则式子可以简化为:
16、
17、若用x表示输入向量,用w表示权重向量即:
18、x=[x0,x1,x2,......,xn]
19、
20、则神经元的输出可以表示为向量相乘的形式:
21、neti=xw
22、yi=f(neti)=f(xw)
23、若神经元的净激活net为正,则该神经元处于激活状态,否则,神经元处于抑制状态。
24、优选的,目标识别算法和故障识别算法采用的是sift定位算法、fast角点特征提取或者卷积神经网络;
25、fast角点特征提取要判断一个候选点是否为角点,依据的是在一个像素点为圆心,半径为3个像素的离散化bresenllam圆周上,在给定阈值的条件下,确定在圆周上是否有多个连续的像素灰度值,且为了加快算法的检测速度,使用机器学习id3贪心算法来构建决策树。
26、一种输电巡检系统的巡检方法,包括有以下步骤:
27、s1、通过供电模块和调压模块进行供电:供电模块和调压模块实现对控制模块进行供电运行,且控制模块通过处理模块和通讯模块实现对无人机模块和摄像机模块进行控制调节;
28、s2、对输电线进行巡检:通过无人机模块和摄像机模块实现对输电线进行巡检,通过巡视检查掌握线路运行状况及周围环境的变化,及时发现设备缺陷和危及线路安全的隐患,提出具体检修意见,以便及时消除缺陷、预防事故发生或将事故限制在最小范围内,从而保证输电线路安全和稳定运行;
29、s3、通过北斗模块实现导航:控制模块通过通讯模块接收北斗模块的地图信息,并且通过地图信息和三维地图,实现对巡检点进行设定,规划巡检路线,便于无人机模块通过检测模块进行巡检;
30、s4、巡检信息进行计算处理:无人机模块和摄像机模块的采集图像通过通讯模块和处理模块将图像信息传输给信息模型和边缘云模块,且信息模型和边缘云模块通过人工智能、深度学习的图像识别、目标识别算法和故障识别算法进行计算处理和分析;
31、s5、信息管理模块进行存储信息:通过信息管理模块实现对检测的数据信息进行存储,并且通过人工巡检模块实现对修复过程进行存储,便于后续进行记录和查询,并且通过辅助模块实现对系统进行便捷性的操作控制。
32、与现有技术相比,本发明的有益效果是:
33、本发明在使用的时候,通过控制模块实现对系统进行控制调节,完成操作控制,并且通过人工巡检、无人机巡检和摄像机巡检进行多种方式的巡检,提高巡检的准确性,并且在无人机巡检的时候,通过北斗模块进行导航和定点,便于无人机进行规划路线,实现安全准确的巡检,以及无人机和摄像机进行巡检的时候,将图像数据信息进行传输给信息模型和边缘云模块进行计算处理,通过人工智能、深度学习的图像识别、目标识别算法和故障识别算法实现对图像进行计算处理,提高故障分析的精准度,并且采用边缘云模块的计算,降低系统的计算压力,提高计算的精准度。
- 还没有人留言评论。精彩留言会获得点赞!