一种除冰机器人通过直线塔及耐张塔时的越障方法与流程
本发明涉及电力线路故障检修,尤其是涉及一种越障除冰机器人及其越障方法和除冰方法。
背景技术:
1、近年来,国内大面积的输电线路覆冰灾害频繁发生,四川贵州、江西、浙江、河南和陕西等省份都曾因风雪、冻雨等极端天气致使输电线路严重覆冰,造成断线、倒塌、覆冰闪络等事故。目前,覆冰情况下,采用直流融冰方式可以有效解决导线覆冰,而地线由于连接方式不同,无法采用直流融冰方式解决,只能依靠自然融冰和人工除冰的方式。如果天气状况不佳或持续覆冰,极大可能引起地线断线从而导致线路停役,且抢修困难、工艺复杂。对于较为严重的导线覆冰,一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。因此地线除冰机器人具有很大的应用前景,可以带来的社会效益和经济效益。
2、目前国内外已有一些不同类型的输电线路除冰机器人,它们可以完成一定程度的除冰任务,有一定的越障能力,但在面临地线严重覆冰时依旧有卡死或者除冰效果不佳等问题,而且在越障过程中,面对双挂点和三角连板以及相邻地线不能刚性相连等问题时,不能有效地越障,为了提高电力线路维护的效率和智能化程度,解决该问题势在必行。
技术实现思路
1、本发明是为了克服上述现有技术中的越障除冰机器人在越障过程中不能有效越障等问题,提供一种除冰机器人通过直线塔及耐张塔时的越障方法。
2、为了实现上述目的, 本发明采用以下技术方案:
3、一种除冰机器人通过直线塔及耐张塔时的越障方法,
4、所述除冰机器人包括:
5、机架,
6、冲击除冰机构, 所述冲击除冰机构滑动设于机架上方, 所述冲击除冰机构包括除冰冲头、用于连接除冰冲头的传动轴和用于实现除冰冲头旋转的旋转轴、除冰驱动组件,所述传动轴两端均设有除冰冲头, 所述除冰驱动组件包括用于驱动传动轴旋转的第一除冰电机和用于驱动旋转轴旋转的第二除冰电机, 所述第二除冰电机驱动旋转轴旋转以使除冰冲头角度发生变化;
7、越障机构, 所述越障机构包括行进机构和设于行进机构下方的夹紧固定机构,所述行进机构包括设于机架顶部的行进轮, 所述夹紧固定机构包括夹紧轮组件和用于驱动夹紧轮组件在机架上滑移的电动推杆, 所述行进轮成对设置, 所述冲击除冰机构设于成对的两个行进轮之间, 所述越障机构与冲击除冰机构配合去除线缆覆冰;
8、所述行进轮包括第一行进轮和第二行进轮, 所述行进机构还设有驱动第一行进轮的第一驱动电机和用于驱动第二行进轮的第二驱动电机, 所述第一行进轮和第二行进轮分别设于冲击除冰机构两侧; 所述第一行进轮和第二行进轮均设有内层凹槽和外层凹槽, 所述内层凹槽用于包裹地线, 所述外层凹槽用于与夹紧固定机构配合以夹紧线缆;
9、所述夹紧轮组件包括设于第一行进轮下方的第一夹紧轮组件和设于第二行进轮下方的第二夹紧轮组件, 电动推杆包括用于推动第一夹紧轮组件在机架上滑移的第一电动推杆和用于推动第二夹紧轮组件在机架上滑移第二电动推杆, 所述第一夹紧轮组件包括成对设置的第一夹紧轮和用于固定第一夹紧轮的第一支撑座, 所述第二夹紧轮组件包括成对设置的第二夹紧轮和用于固定第二夹紧轮的第二支撑座;
10、驱动系统, 所述驱动系统包括用于驱动除冰机构的除冰驱动组件、用于驱动行进轮转动的行进轮驱动电机;
11、监测机构,所述监测机构包括固定在机架上的摄像头;
12、控制系统,所述控制系统用于控制越障机构和冲击除冰机构工作状态;
13、电源系统, 所述电源系统用于为冲击除冰机构、越障结构、监测机构、控制系统和驱动系统提供电力供应;
14、越障辅助夹紧机构, 所述越障辅助夹紧机构包括辅助支架、第三夹紧轮组件和联动结构, 第三夹紧轮组件滑动设置在辅助支架上, 所述联动结构包括第一连杆、转动杆,所述辅助支架设有滑轨, 所述第一连杆两端分别与第三夹紧轮组件第二夹紧轮组件转动连接, 所述转动杆一端转动连接在第一连杆上, 另一端滑动设置在辅助支架的滑轨内,滑轨的上端设有用于卡接转动杆的弹性卡接片,第二夹紧轮上升至嵌设在第二行进轮内的状态时, 所述转动杆通过弹性卡接片卡接在滑轨上端, 所述第三夹紧轮组件随第二夹紧轮组件下降而上升, 或者所述第三夹紧轮组件随第二夹紧轮组件上升而下降;
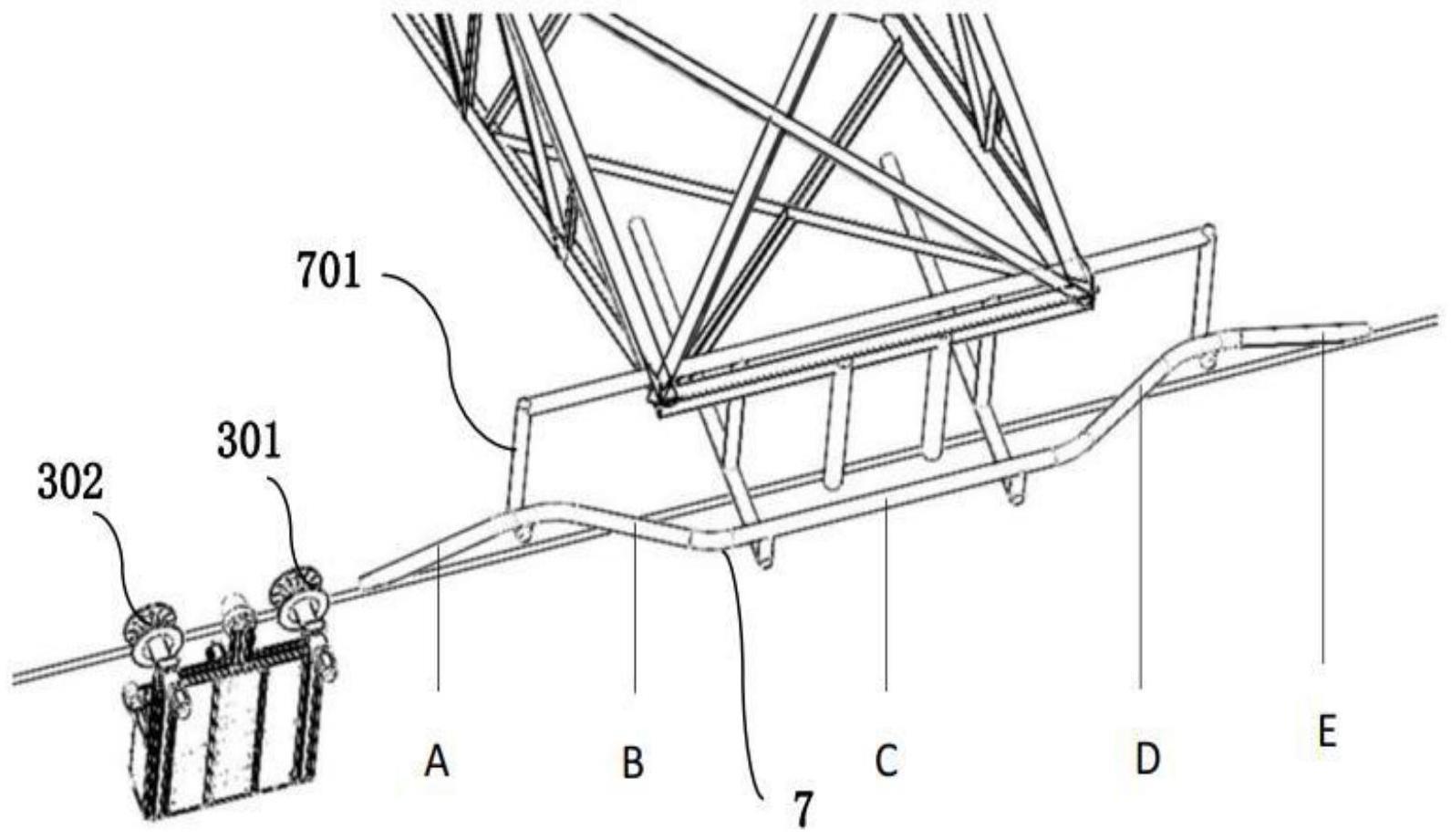
15、所述直线塔及耐张塔设有辅助越障轨道,所述辅助越障轨道包括a段、b段、c段、d段和e段,其中a段轨道自地线向上延伸, 使除冰机器人脱离地线,b段轨道向远离直线塔或耐张塔方向延伸,b段轨道和a段轨道交接处存在弯曲弧度;c段轨道平行于地线;d段轨道向靠近地线的方向延伸,d段轨道向靠近地线方向水平延伸,或者d段轨道向靠近地线的方向倾斜向下延伸,使d段轨道有下降坡度;e段轨道高度高于地线,e段轨道向地线方向倾斜向下延伸,使除冰机器人回到地线;
16、所述除冰机器人通过直线塔及耐张塔时的越障方法包括如下步骤:
17、s001: 除冰机器人进入辅助越障轨道, 冲击除冰机构根据监测机构检测到的地线下方覆冰厚度调整倾斜角度, 除冰机器人进入除冰工作状态;
18、s002:第一行进轮越过地线与辅助越障轨道交界处,进入到辅助越障轨道的a段轨道内,调整冲击除冰机构的角度, 使除冰冲头垂直冲击地线下方的冰层;s003: 第二行进轮越过地线与辅助越障轨道交界处,进入到辅助越障轨道的段轨道内, 第二夹紧轮组件通过第二电动推杆上升配合第二行进轮的外部凹槽夹住辅助越障轨道, 保持除冰机器人稳定, 同时转动杆通过弹性卡接片卡接在滑轨的上端, 第一驱动电机和第二驱动电机分别驱动第一行进轮和第二行进轮旋转,使第一行进轮和第二行进轮提供动力;
19、s004:第一行进轮直接越过a段轨道与b段轨道的交接处,监测机构检测到第二夹紧轮组件遇障, 第二电动推杆控制第二夹紧轮组件下降, 在联动结构作用下, 第三夹紧轮组件向上移动, 直至第三夹紧轮贴紧辅助越障轨道, 第二行进轮继续提供前进的动力并进入b段轨道, 当监测机构检测到第二行进轮越过障碍进入b段轨道时, 第二电动推杆控制第二夹紧轮组件上升, 在重力和联动结构作用下,第三夹紧轮组件下降直至越过障碍;
20、s005:在b段轨道, 冲击除冰机构继续除冰,第二夹紧轮组件保持与第二行进机构配合夹紧辅助越障轨道的状态, 使得除冰机器人在辅助越障轨道上的稳定性;
21、s006:在bc轨道、cd轨道、de轨道的交接处, 除冰机器人的越障方法与步骤s004相同,且在各段轨道上均由第一行进轮和第二行进轮提供前进的动力直至除冰机器人回到地线。
22、因此,本发明具有如下有益效果:
23、(1)具有良好的除冰效果、避免越障除冰机器人在除冰过程中卡死、实现有效越障;
24、(2)行进轮采用双凹槽防滑设计,行进轮具有双层凹槽,里层凹槽用以有效包裹地线, 外层凹槽与夹紧轮一起包裹夹紧地线覆冰体, 使得除冰机器人既可以稳定地悬挂在去除覆冰的地线之上, 也可以稳定地悬挂于去除覆冰或无冰的地线之上, 不会发生脱线并正常行走; 此外行进轮利用内部凹槽深度大和表面有防滑纹路的特点,还可以碾除地线上层的冰层, 具有除冰功能;
25、(3)防护上板和电气箱体的顶板之间形成一定的倾斜角度,地线掉落的冰层可以沿着机架防护上板滑落,避免掉落的冰层堆积在越障除冰机器人上, 减少越障除冰机器人的重量进而减小地线的负担;
26、(4)冲击除冰机构的除冰冲头采用平口设计,增大和冰层表面的接触面积,这样可以增大作用力, 并且不同于其他弹簧式冲击除冰机构的敲击方式, 敲击方式作用力具有大小不连续性和方向不稳定的特点,但是旋转式冲击除冰机构通过电机控制旋转轴使得除冰冲头高速旋转, 产生连续并且稳定的冲击力, 因此具有良好的除冰效果;
27、(5)除冰冲头作用在地线下方,垂直冲击地线下方的冰层,利用地线覆冰力学特性, 可以去除大部分冰层, 地线上表面剩余冰层被行进轮碾除, 实现冲击除冰和碾压除冰相结合的组合除冰方法; 在地线下表面严重覆冰的情况下, 冲击除冰机构可以旋转角度,方便除冰机器人上线, 防止除冰机器人卡死在地线;
28、(6)夹紧机构保持除冰机器人稳定,行进机构提供前进动力,为冲击除冰机构提供稳定的除冰环境, 三个机构相互配合, 共同完成除冰工作;
29、(7)联动结构使得第三夹紧轮组件和第二夹紧轮组件通过联动结构实现同步升降, 当遇到障碍时, 第二夹紧轮组件先下降, 在联动结构作用下, 第三夹紧轮组件上升直至第三夹紧轮组件与第二行进轮上下交错夹紧, 保持越障除冰机器人在地线或辅助越障机构上的稳固。
- 还没有人留言评论。精彩留言会获得点赞!