光伏板清扫系统的制作方法
本发明属于太阳能光伏板清扫,具体讲就是涉及光伏板清扫系统,尤其适用于集中式光伏发电站光伏板的清扫。
背景技术:
1、光伏是太阳能光伏发电系统的简称,是一种利用太阳电池半导体材料的光伏效应,将太阳光辐射能直接转换为电能的一种新型发电系统,相较于传统的化石能源发电,光伏发电不会产生对环境有危害的物质,产生能源的方式更直接更清洁,因此受到人们的重视;现有的光伏发电站大多集中在野外,由于空气中存在灰尘长时间容易导致灰尘堆积在发电板上,进而遮挡阳光照射,从而导致发电效率降低。随着太阳能光伏电站的大规模建设,光伏电站面临着光伏组件清洁的问题。
2、近几年,光伏板自动清洁机器人逐渐运用到光伏组件的清洁工作中来。但是由于不同地区所在的纬度及气候等差异,为实现光伏组件的最大发电效率,各地区的光伏组件安装通常具有各自的最佳安装角度;不同地区、不同场地,光伏组件的安装角度和高度通常不同;即使同一片光伏场地,由于存在安装误差或地形变化,光伏组件在安装角度及安装高度上也不完全一致,造成光伏板顶端错边。另外,光伏板之间由于安装的需要,会存在大小不一的空隙。由于这些差异性的存在,当前,光伏组件清扫机器人多是针对特定光伏排布场景进行设计,由此导致:首先,现有的光伏清扫机器人只能根据特定的应用场地,以固定的角度及安装高度与光伏组件在单一方向上对齐,只能针对特定排布方式的光伏组件进行清扫,同时,对光伏组件排布的整齐性要求较高,当光伏组件排布不整齐时,尤其是在光伏板安装角度(与大地夹角)≥25°以上的集中式光伏板阵列上,由于光伏板自动清洁机器人主动轮对光伏板压力下降,摩擦力减少,主动轮的驱动力就会急剧下降,可能发生机器人卡死现象。其次,现有具有调节功能的清扫机器人只能进行角度方向或高度方向的单一因素的定位,无法同时进行角度和高度方向的位置定位。最后,现有部分清扫机器人采用桥接架的形式实现清扫机器人与不规则安装的光伏组件的位置定位,此种方式,在机器人部署时需要在光伏场地上安装额外的支架系统,增加了机器人的部署成本;同时,此种位置定位方法对桥接架的倾斜角度有要求,通常不能大于20度,限制了其应用范围。
3、为了解决上述难题,中国专利201910813117.4公开了一种光伏清扫机器人与光伏组件对齐的自动定位装置及方法,可用于光伏组件的清扫机器人系统中,可使清扫机器人不受光伏组件的安装高度、角度及误差的影响,实现清扫机器人与各排光伏组件的准确定位;实现单台清扫机器人对多排光伏组件的自动清扫;实现对不同安装角度的光伏组件进行自动清扫;实现对不同安装高度的组件进行自动清扫。
4、中国专利201821792688.1公开了一种清扫机器人用摆渡装置及清扫机器人系统,其结构包括主要由底架、支撑架、行走装置、停靠架组成的转运车体,还包括:地面轨道,沿着的并列的光伏板阵列铺设;锁止装置,包括销轴、推动装置和至少一个销孔,通过推动装置带动销轴与销孔插拔配合以实现转运车体在地面轨道上的锁定或解锁;转运车体感应装置,用于感应转运车体是否移动至相应光伏板阵列处;清扫机器人感应装置,用于感应清扫机器人是否位于停靠架上。清扫机器人系统包括清扫机器人和上述清扫机器人用摆渡装置。
5、但是,集中式光伏发电站光伏板的清扫过程中,现有的光伏清扫系统依然存在以下几个方面的缺陷:
6、(1)清扫机器人在清扫集中式光伏发电站光伏板过程中,遇到坡度较大的光伏板时,清扫机器人由于自身重力作用,有时候出现爬坡困难甚至卡死的现象;
7、(2)不同规格的光伏板需要匹配不同规格的清扫机器人进行清扫;
8、(3)清扫机器人的主刷为中置结构,导致光伏板无法完全被清扫到;
9、(4)清扫机器人在跨过同排的光伏板之间的空档的时候需要利用过桥轨道,目前的过桥轨道结构复杂,安装难度大,过多的破环光伏板,降低了光伏板的使用寿命。
10、(5)清扫机器人的换行轨道通过高度和角度调节,实现对不同安装角度的光伏组件进行自动清扫,导致换行轨道结构复杂\可靠性不足。
11、(6)清扫机器人停在换行车上稳定性不足;
12、(7)清扫机器人重量大,运行中稳定性不足。
技术实现思路
1、本发明的目的就是针对上述现有的光伏板清扫系统存在的缺陷和难题,提供一种光伏板清扫系统,尤其适用于集中式光伏发电站光伏板的清扫,整个光伏板清扫系统结构简单,具有智能化、模块化、标准化、系列化特点,同时清扫系统稳定可靠,工作顺畅,保证了集中式光伏发电站光伏板的清扫顺利实现。
2、技术方案
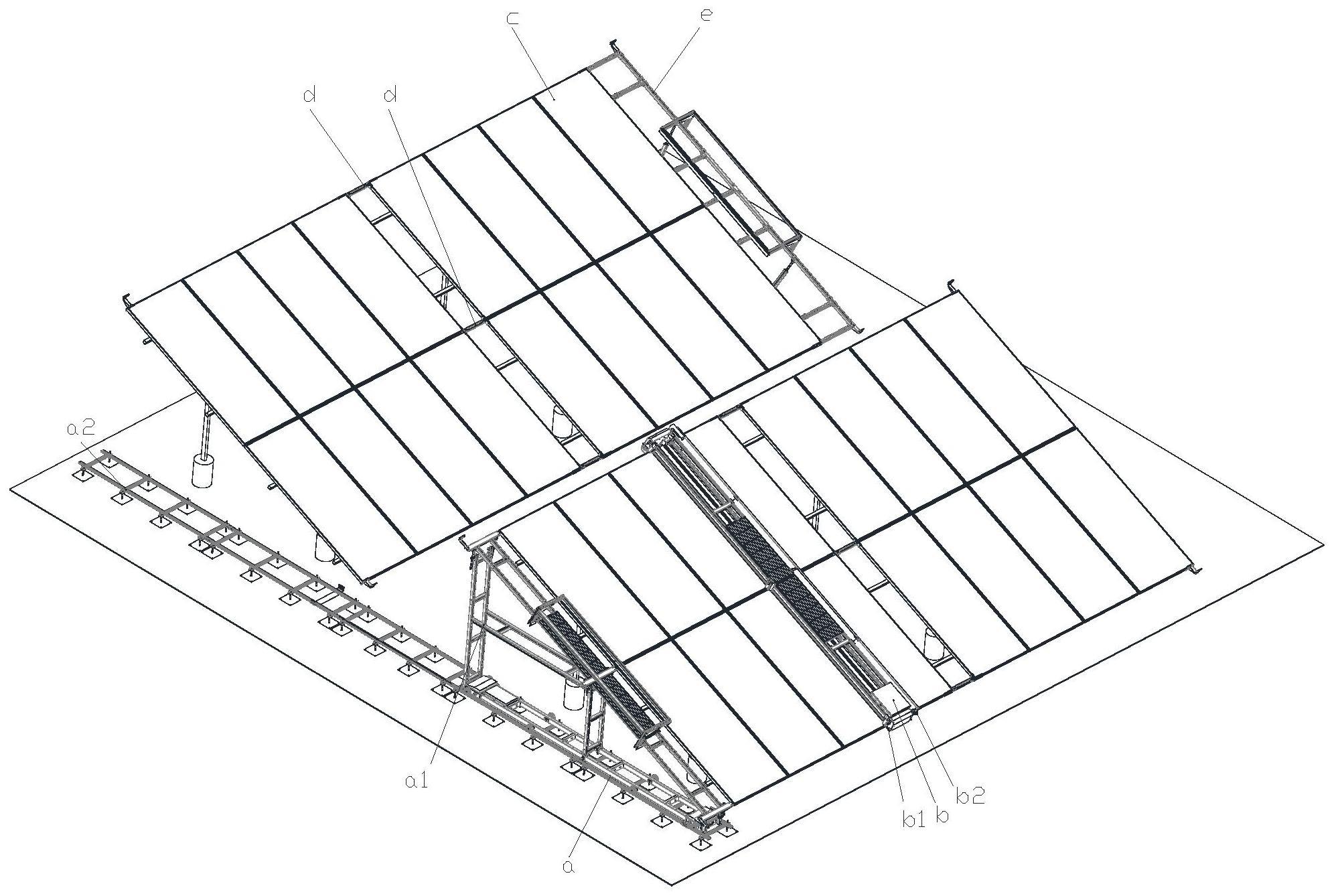
3、为了实现上述技术目的,本发明提供的光伏板清扫系统,包括换行系统和清扫机器人,所述换行系统包括换行车和地面轨道,所述地面轨道铺设于并排而设的一排排光伏板陈列的一侧供换行车行走,所述清扫机器人能够运动到所述换行车上并被所述换行车承载着在所述地面轨道上行走,从而实现在所述并排而设的一排排光伏板陈列之间转运,进而对所述并排而设的一排排光伏板陈列c进行清扫,其特征在于:所述清扫机器人上设有垂直交叉浮动传动机构用于保证所述清扫机器人在并排而设的一排排光伏板陈列上运动过程中能够行走顺畅。
4、在其中的一个实施例中,所述并排而设的一排排光伏板陈列的一侧的地面轨道的高度与其对应的该列光伏板的高度是相应的,从而使所述换行车能够承载着清扫机器人在地面轨道上行走到相应的一列光伏板的一侧后能够直接运动到该列光伏板上进行清扫工作。
5、在其中的一个实施例中,所述并排而设的一排排光伏板陈列中任一列光伏板中的若干光伏板之间的空档之间设置有过桥轨道供所述清扫机器人跨过所述空档从而顺利在一列光伏板上进行清扫。
6、在其中的一个实施例中,所述并排而设的一排排光伏板陈列的另一侧相应的设置停车架用于所述清扫机器人的停车。
7、在其中的一个实施例中,所述清扫机器人采用模块化结构能够根据光伏板的长度选择不同的长度。
8、在其中的一个实施例中,所述清扫机器人的主刷组件设置在所述清扫机器人b的前侧从而扩大清扫面积避免漏扫。
9、在其中的一个实施例中,锁定装置能够使所述清扫机器人在换行车或停车架上时候被锁定。
10、在其中的一个实施例中,所述垂直交叉浮动传动机构包括安装支架,传动轴通过轴承座组件装在所述安装支架上,主动轮组件装在所述传动轴上能够和所述传动轴一起转动,所述传动轴的一端穿过所述安装支架上的轴承座组件后与转向万向节连接,所述转向万向节一端连接所述传动轴的一端,另一端连接辅助轮组件,所述辅助轮组件与弹性复位组件联动。
11、在其中的一个实施例中,所述轴承座组件包括轴承座,所述轴承座装在所述安装支架的内侧面,所述传动轴一端穿过所述轴承座上的支撑孔与所述转向万向节联动。
12、在其中的一个实施例中,所述主动轮组件包括主动轮,所述主动轮装在所述传动轴上,所述传动轴另一端位于所述主动轮的内侧部分套装有主动轮罩,所述主动轮罩固定装在安装板上,所述安装板固定装在所述安装支架上。
13、在其中的一个实施例中,所述辅助轮组件包括辅助轮,所述辅助轮装在辅助轮轴上,所述辅助轮轴一端与转向万向节另一端联动,所述辅助轮轴装在活动支撑框上,所述活动支撑框装在所述安装支架底板下方能够在所述安装支架底板下方运动。
14、在其中的一个实施例中,所述活动支撑框通过旋转轴装在所述安装支架底板下方并能绕所述旋转轴转动。
15、在其中的一个实施例中,所述活动支撑框连接有限位螺钉和限位销钉,所述限位螺钉和限位销钉位于所述安装支架底板上相应的弧形槽一和弧形槽二内能够滑动限位。
16、在其中的一个实施例中,所述弹性复位组件包括复位螺杆,所述复位螺杆一端穿过所述安装支架底板上的限位板,另一端伸入所述活动支撑框,所述复位螺杆的另一端上套装有复位弹簧,所述复位弹簧一端抵住所述活动支撑框,另一端抵住所述复位螺杆上的弹簧调节套。
17、在其中的一个实施例中,所述主刷组件包括毛刷辊,所述毛刷辊的两端装在所述连接支架上,所述连接支架一端固定装在所述安装支架的侧端,另一端伸到所述安装支架前侧方用于安装毛刷辊。
18、在其中的一个实施例中,所述地面轨道包括行走轨道,所述行走轨道装在地面支撑上,所述地面支撑的高度可调,所述地面支撑的高度与其相应一侧的光伏板的高度相对应。
19、在其中的一个实施例中,所述换行车包括车轿,所述车轿下装有行走轮,车架装在所述车轿上,所述车架的顶部安装有承载架用于承载所述清扫机器人,所述承载架与水平方向的车轿之间的夹角是固定不变的。
20、在其中的一个实施例中,所述换行车上设置有激光传感器,所述并排而设的一排排光伏板陈列的一侧的地面轨道上相应设置有光栅,所述换行车行进到所述并排而设的一排排光伏板陈列的一侧的地面轨道上的时候通过检测到相应的光栅能够自动识别出该排光伏板陈列的具体位置。
21、在其中的一个实施例中,所述锁定装置包括承载架或停车架上固定装有的锁定板,清扫机器人停在所述承载架或停车架上时候与所述锁定板对应位置装有锁定轴,所述锁定轴通过连杆机构与电推相连接,所述电推连接有传感器,所述传感器能够控制所述电推驱动所述锁定轴伸入或抽出所述锁定板。
22、在其中的一个实施例中,所述过桥轨道包括若干侧边过桥轨道和中间过桥轨道,所述中间过桥轨道位于所述若干侧边过桥轨道之间,所述侧边过桥轨道和中间过桥轨道之间设置有支撑梁连接,所述侧边过桥轨道两端设置有可调式光伏板连接组件用于所述侧边过桥轨道与相应的光伏板的两侧连接,所述中间过桥轨道上设置有可调连接板用于所述中间过桥轨道两端与相应的光伏板的相应的侧边连接。
23、在其中的一个实施例中,所述可调式光伏板连接组件包括连接型板和光伏板压紧板,所述连接型板与所述侧边过桥轨道铰接,所述光伏板压紧板插入光伏板与连接型板之间使所述连接型板与光伏板过盈连接。
24、在其中的一个实施例中,所述连接型板伸出连接凸台,所述连接凸台上设有连接孔,铰接螺钉穿过连接孔装在连接卡扣上,所述连接卡扣装在所述侧边过桥轨道上,所述连接型板能够绕所述铰接螺钉在水平面左右转动,所述侧边过桥轨道能够绕所述铰接螺钉在竖直平面上下转动,所述侧边过桥轨道上设置有若干限位螺钉能够限制所述连接卡扣的安装位置。
25、在其中的一个实施例中,所述支撑梁上装有可调式抱箍撑杆组件。
26、在其中的一个实施例中,所述可调式抱箍撑杆组件包括支撑连接板,所述支撑连接板固定在所述支撑梁上,可调式支撑螺杆的一端枢接在所述支撑连接板上,另一端连接可调式抱箍。
27、在其中的一个实施例中,所述停车架包括停车导轨,所述停车导轨上设置有位置可调的光伏板梁接杆,所述光伏板梁接杆的前端装有光伏板梁连接槽钢,停车导轨上设置有毛刷定位框,所述停车导轨下面装有可调式抱箍撑杆组件。
28、有益效果
29、本发明提供的光伏板清扫系统,包括换行系统和清扫机器人,所述换行系统包括换行车和地面轨道,所述地面轨道铺设于并排而设的一排排光伏板陈列的一侧供换行车行走,所述清扫机器人能够运动到所述换行车上并被所述换行车承载着在所述地面轨道上行走,从而实现在所述并排而设的一排排光伏板陈列之间转运,进而对所述并排而设的一排排光伏板陈列进行清扫,其特征在于:所述清扫机器人上设有垂直交叉浮动传动机构用于保证所述清扫机器人在并排而设的一排排光伏板陈列上运动过程中能够能够行走顺畅。该光伏板清扫系统相对于现有技术中的光伏板清扫系统,清扫机器人采用模块化设计,能够根据光伏板长度组装不同规格的光伏板清扫机器人,适用于目前集中式光伏板排列的绝大多数场景,清扫机器人安装有垂直交叉浮动传动机构能够保证清扫机器人在光伏板组件上行走顺畅,主刷组件设置在所述清扫机器人的前侧从而扩大清扫面积避免漏扫,同时通过调整行走轨道高度即可实现对换行车承载面与光伏板组之间的位置,使所述换行车能够承载着清扫机器人在地面轨道上行走到相应的一列光伏板的一侧后能够直接运动到该列光伏板上进行清扫工作。总之,整个光伏板清扫系统结构进一步简化,具有智能化、模块化、标准化、系列化特点,重量变轻,工作过程可靠稳定,安装和操作难度降低。
- 还没有人留言评论。精彩留言会获得点赞!