基于高频正弦电压注入的永磁同步电机电感参数辨识方法与流程
本发明涉及电机,尤其是涉及一种基于高频正弦电压注入的永磁同步电机电感参数辨识方法。
背景技术:
1、永磁同步电机被广泛应用于电动汽车、家电类洗衣机、冰箱等领域,相应变频驱动技术涉及弱磁控制、无位置传感器及速度环、电流环等自适应环路设计,对电机电感等参数的精确辨识有助于获得电机精准的数学模型,以提高控制的鲁棒性。
2、常用永磁同步电机交直轴电感辨识主要分为在线参数辨识和离线参数辨识两类。在线参数辨识实时性高,但运算量大,对单片机的计算能力要求较高;离线参数辨识运算量相对减少,主要有1)在电机每相注入直流脉冲电压检测响应电流时间常数的方法;2)在αβ坐标系下电机模型注入高频交流电压,并检测响应电流进行辨识;3)在dq坐标系下注入高频交流电压,并检测响应电流进行辨识。由于电机转子位置对电机电感辨识存在影响,上述方法大多需要位置传感器检测电机转子位置或者注入特定直流分量,将电机转子锁定在特定位置,以减少电机转子位置变化对电机电感辨识的影响,然而,上述方法增加了转子位置传感器,成本较高,且采用转子位置预定位方法,过程复杂,不适用于带载或对电机转动严格限制的场合,且预定位理论位置与转子实际位置存在误差,影响电机电感辨识准确度。因此,寻求无位置传感器,无需电机转子位置锁定,计算简单的电机的交直轴电感参数辨识具有重要意义。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的目的在于提出一种基于高频正弦电压注入的永磁同步电机电感参数辨识方法、装置、电机及空调器。
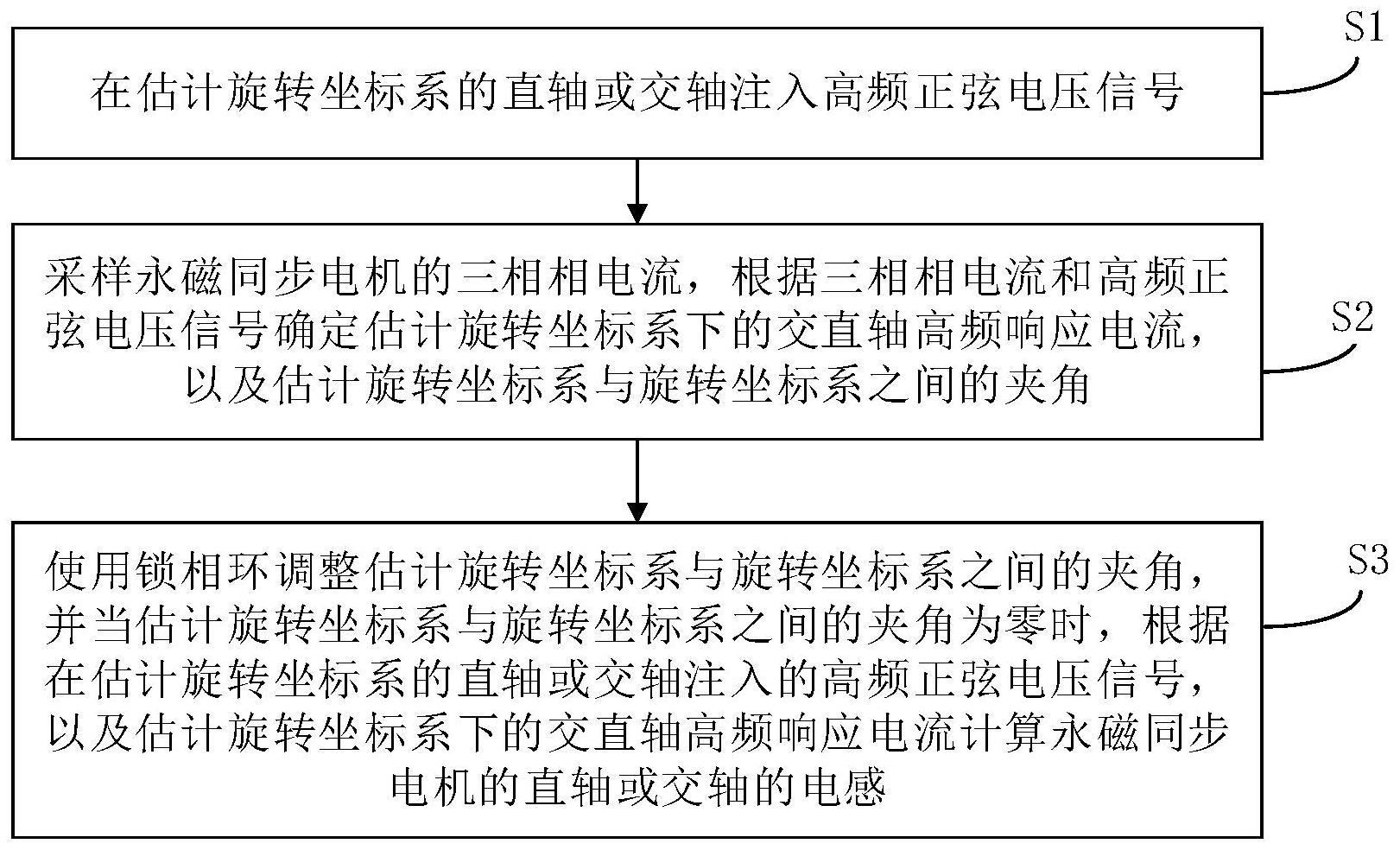
2、本发明提出的一种基于高频正弦电压注入的永磁同步电机电感参数辨识方法,包括:在估计旋转坐标系的直轴或交轴注入高频正弦电压信号;采样永磁同步电机的三相相电流,根据所述三相相电流和所述高频正弦电压信号确定所述估计旋转坐标系下的交直轴高频响应电流,以及所述估计旋转坐标系与旋转坐标系之间的夹角;使用锁相环调整所述估计旋转坐标系与所述旋转坐标系之间的夹角,并当所述估计旋转坐标系与所述旋转坐标系之间的夹角为零时,根据在所述估计旋转坐标系的直轴或交轴注入的所述高频正弦电压信号,以及所述估计旋转坐标系下的交直轴高频响应电流计算所述永磁同步电机的直轴或交轴的电感。
3、另外,根据本发明实施例的基于高频正弦电压注入的永磁同步电机电感参数辨识方法,还可以具有如下附加的技术特征:
4、进一步地,根据所述三相相电流和所述高频正弦电压信号确定所述估计旋转坐标系下的交直轴高频响应电流,以及所述估计旋转坐标系与旋转坐标系之间的夹角,包括:将所述三相相电流依次进行clark变换和park变换得到所述估计旋转坐标系下的交直轴高频响应电流;当所述高频正弦电压信号注入在所述估计旋转坐标系的直轴上时,根据所述交直轴高频响应电流的交轴电流分量确定所述估计旋转坐标系与所述旋转坐标系之间的夹角;以及,当所述高频正弦电压信号注入在所述估计旋转坐标系的交轴上时,根据所述交直轴高频响应电流的直轴电流分量确定所述估计旋转坐标系与所述旋转坐标系之间的夹角。
5、进一步地,当所述高频正弦电压信号注入在所述估计旋转坐标系的直轴上时,所述交直轴高频响应电流为:
6、
7、其中,为所述永磁同步电机在所述估计旋转坐标系下的交直轴高频响应电流,ld、lq为所述永磁同步电机的交直轴电感,ud为所述高频正弦电压信号的幅值,θh为所述高频正弦电压信号的相角,ωh为所述高频正弦电压信号的角频率,δθ为所述估计旋转坐标系与所述旋转坐标系之间的夹角。
8、当所述高频正弦电压信号注入在所述估计旋转坐标系的交轴上时,所述交直轴高频响应电流为:
9、
10、
11、
12、其中,为所述永磁同步电机在所述估计旋转坐标系下的交直轴高频响应电流,ld、lq为所述永磁同步电机的交直轴电感,uq1为所述高频正弦电压信号的幅值,θh1为所述高频正弦电压信号的相角,ωh1为所述高频正弦电压信号的角频率,δθ1为所述估计旋转坐标系与所述旋转坐标系之间的夹角。
13、进一步地,根据所述交直轴高频响应电流的交轴电流分量确定所述估计旋转坐标系与所述旋转坐标系之间的夹角,包括:将所述交直轴高频响应电流的交轴电流分量乘以sinθh,得到第一乘积;对所述第一乘积进行低通滤波得到所述估计旋转坐标系与所述旋转坐标系之间的夹角,其中,θh为所述高频正弦电压信号的相角。
14、进一步地,根据所述交直轴高频响应电流的直轴电流分量确定所述估计旋转坐标系与所述旋转坐标系之间的夹角,包括:将所述交直轴高频响应电流的直轴电流分量乘以sinθh,得到第二乘积;对所述第二乘积进行低通滤波得到所述估计旋转坐标系与所述旋转坐标系之间的夹角,其中,θh为所述高频正弦电压信号的相角。
15、进一步地,根据在所述估计旋转坐标系的直轴或交轴注入的所述高频正弦电压信号,以及所述估计旋转坐标系下的交直轴高频响应电流计算所述永磁同步电机的直轴或交轴的电感,包括:当所述高频正弦电压信号注入在所述估计旋转坐标系的直轴上时,根据所述交直轴高频响应电流的直轴电流分量计算所述永磁同步电机的直轴电感;当所述高频正弦电压信号注入在所述估计旋转坐标系的交轴上时,根据所述交直轴高频响应电流的交轴电流分量计算所述永磁同步电机的交轴电感。
16、进一步地,根据所述交直轴高频响应电流的直轴电流分量计算所述永磁同步电机的直轴电感,包括:将所述交直轴高频响应电流的直轴电流分量乘以sinθh,得到第三乘积;对所述第三乘积进行低通滤波得到所述永磁同步电机的直轴电感,其中,θh为所述高频正弦电压信号的相角。
17、进一步地,根据所述交直轴高频响应电流的交轴电流分量计算所述永磁同步电机的交轴电感,包括:将所述交直轴高频响应电流的交轴电流分量乘以sinθh,得到第四乘积;对所述第四乘积进行低通滤波得到所述永磁同步电机的交轴电感,其中,θh为所述高频正弦电压信号的相角。
18、进一步地,所述旋转坐标系的d轴方向为所述永磁同步电机中永磁体转子的n极方向,所述旋转坐标系的q轴方向为将所述d轴方向逆时针旋转90°的方向。
19、根据本发明实施例的基于高频正弦电压注入的永磁同步电机电感参数辨识方法,通过在估计旋转坐标系的直轴或交轴注入高频正弦电压信号;采样永磁同步电机的三相相电流,根据三相相电流和高频正弦电压信号确定估计旋转坐标系下的交直轴高频响应电流,以及估计旋转坐标系与旋转坐标系之间的夹角;使用锁相环调整估计旋转坐标系与旋转坐标系之间的夹角,并当估计旋转坐标系与旋转坐标系之间的夹角为零时,根据在估计旋转坐标系的直轴或交轴注入的高频正弦电压信号,以及估计旋转坐标系下的交直轴高频响应电流计算永磁同步电机的直轴或交轴的电感,实现设定的估计旋转坐标系与旋转坐标系的实时跟随,使得无需通过转子位置传感器测量即可获取旋转坐标系的位置信息,从而降低硬件成本;同时,也无需通过预定位的方法锁定转子位置,从而减少因预定位设定转子位置与转子实际位置之间的误差而产生的辨识误差,提高电机交直轴电感的辨识精度,并简化辨识过程。
20、针对上述存在的问题,本发明还提出一种基于高频正弦电压注入的永磁同步电机电感参数辨识装置,包括:高频正弦电压信号注入模块,用于在估计旋转坐标系的直轴或交轴注入所述高频正弦电压信号;第一确定模块,用于采样永磁同步电机的三相相电流,根据所述三相相电流和所述高频正弦电压信号确定所述估计旋转坐标系下的交直轴高频响应电流,以及所述估计旋转坐标系与旋转坐标系之间的夹角;调整模块,用于使用锁相环调整所述估计旋转坐标系与所述旋转坐标系之间的夹角,并当所述估计旋转坐标系与所述旋转坐标系之间的夹角为零时,根据在所述估计旋转坐标系的直轴或交轴注入的所述高频正弦电压信号,以及所述估计旋转坐标系下的交直轴高频响应电流计算所述永磁同步电机的直轴或交轴的电感。
21、根据本发明实施例的基于高频正弦电压注入的永磁同步电机电感参数辨识装置,通过在估计旋转坐标系的直轴或交轴注入高频正弦电压信号;采样永磁同步电机的三相相电流,根据三相相电流和高频正弦电压信号确定估计旋转坐标系下的交直轴高频响应电流,以及估计旋转坐标系与旋转坐标系之间的夹角;使用锁相环调整估计旋转坐标系与旋转坐标系之间的夹角,并当估计旋转坐标系与旋转坐标系之间的夹角为零时,根据在估计旋转坐标系的直轴或交轴注入的高频正弦电压信号,以及估计旋转坐标系下的交直轴高频响应电流计算永磁同步电机的直轴或交轴的电感,实现设定的估计旋转坐标系与旋转坐标系的实时跟随,使得无需通过转子位置传感器测量即可获取旋转坐标系的位置信息,从而降低硬件成本;同时,也无需通过预定位的方法锁定转子位置,从而减少因预定位设定转子位置与转子实际位置之间的误差而产生的辨识误差,提高电机交直轴电感的辨识精度,并简化辨识过程。
22、针对上述存在的问题,本发明还提出一种电机,包括:如上述任一实施例所述的基于高频正弦电压注入的永磁同步电机电感参数辨识装置。
23、根据本发明实施例的电机,通过在估计旋转坐标系的直轴或交轴注入高频正弦电压信号;采样永磁同步电机的三相相电流,根据三相相电流和高频正弦电压信号确定估计旋转坐标系下的交直轴高频响应电流,以及估计旋转坐标系与旋转坐标系之间的夹角;使用锁相环调整估计旋转坐标系与旋转坐标系之间的夹角,并当估计旋转坐标系与旋转坐标系之间的夹角为零时,根据在估计旋转坐标系的直轴或交轴注入的高频正弦电压信号,以及估计旋转坐标系下的交直轴高频响应电流计算永磁同步电机的直轴或交轴的电感,实现设定的估计旋转坐标系与旋转坐标系的实时跟随,使得无需通过转子位置传感器测量即可获取旋转坐标系的位置信息,从而降低硬件成本;同时,也无需通过预定位的方法锁定转子位置,从而减少因预定位设定转子位置与转子实际位置之间的误差而产生的辨识误差,提高电机交直轴电感的辨识精度,并简化辨识过程。
24、针对上述存在的问题,本发明还提出一种空调器,包括:如上述任一实施例所述的电机。
25、根据本发明实施例的空调器,通过在估计旋转坐标系的直轴或交轴注入高频正弦电压信号;采样永磁同步电机的三相相电流,根据三相相电流和高频正弦电压信号确定估计旋转坐标系下的交直轴高频响应电流,以及估计旋转坐标系与旋转坐标系之间的夹角;使用锁相环调整估计旋转坐标系与旋转坐标系之间的夹角,并当估计旋转坐标系与旋转坐标系之间的夹角为零时,根据在估计旋转坐标系的直轴或交轴注入的高频正弦电压信号,以及估计旋转坐标系下的交直轴高频响应电流计算永磁同步电机的直轴或交轴的电感,实现设定的估计旋转坐标系与旋转坐标系的实时跟随,使得无需通过转子位置传感器测量即可获取旋转坐标系的位置信息,从而降低硬件成本;同时,也无需通过预定位的方法锁定转子位置,从而减少因预定位设定转子位置与转子实际位置之间的误差而产生的辨识误差,提高电机交直轴电感的辨识精度,并简化辨识过程。
26、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!