一种叠层-多齿微型压电直线执行器及其极化与驱动方法
本发明属于微型压电驱动,一种叠层-多齿微型压电直线执行器及其极化与驱动方法。
背景技术:
1、微型压电驱动电机是利用压电材料的逆压电效应,对驱动器件施加高频交流电,以激发驱动器件在超声频段内做微幅振动,并通过驱动器件(定子)与动子之间的摩擦作用将振动转换成动子的直线或旋转运动,输出功率,驱动负载,具有结构微型化、响应速度快、电磁兼容性好、控制精确等优点,广泛应用于机器人、精密仪器仪表、电子数码产品等领域。
2、随着应用场景的不断拓展,压电马达通常需要实现双向往复运动,常规的压电驱动马达通常采用多模态复合的驱动方式,如l1b2双复合模态驱动的压电马达,通常施加两相位的高频交流电压以驱动动子沿某一方向运动,而如果沿反向驱动,需要将两相交流电压调换。但多模态复合的驱动器对于尺寸限制和驱动频率的要求很严格,其外形尺寸和驱动频率需要可以实现多模态共振。单模态驱动的压电执行器对外形尺寸和驱动频率的限制并不严格,但单一一种谐振模态只能实现一个方向的驱动。
3、qian x h等人于2011年在applied mechanics&materials中发表的文章anewstanding-wave linear moving ultrasonic motor based on two bending modes中公开了一种基于两种弯曲共振模态的线性压电马达,由一个包含有3对齿的金属基板和两组pzt元件组成,两组分离的pzt元件分别用于激活马达定子的b3和b4模态,驱动马达动子实现向前和向后运动。该马达定子因为在结构上包含有金属基板,而且b3和b4模态的两组pzt元件各自分离,因此重量会大一些,表现在马达性能上就是推重比会比较低,影响马达的负载能力。此外,该压电马达的驱动电压达到36v,而且控制电路也比较复杂。
技术实现思路
1、为了解决现有技术中所存在的推重比小、负载能力低的技术问题,本发明提出一种叠层-多齿微型压电直线执行器及其极化与驱动方法,该压电直线执行器包括一种压电叠层结构和驱动齿,分别激发执行器的第三阶弯振位移响应和第四阶弯振位移响应,可以实现对微型压电马达动子的正向或反向直线驱动。
2、为了实现上述目的,本发明的技术方案如下:
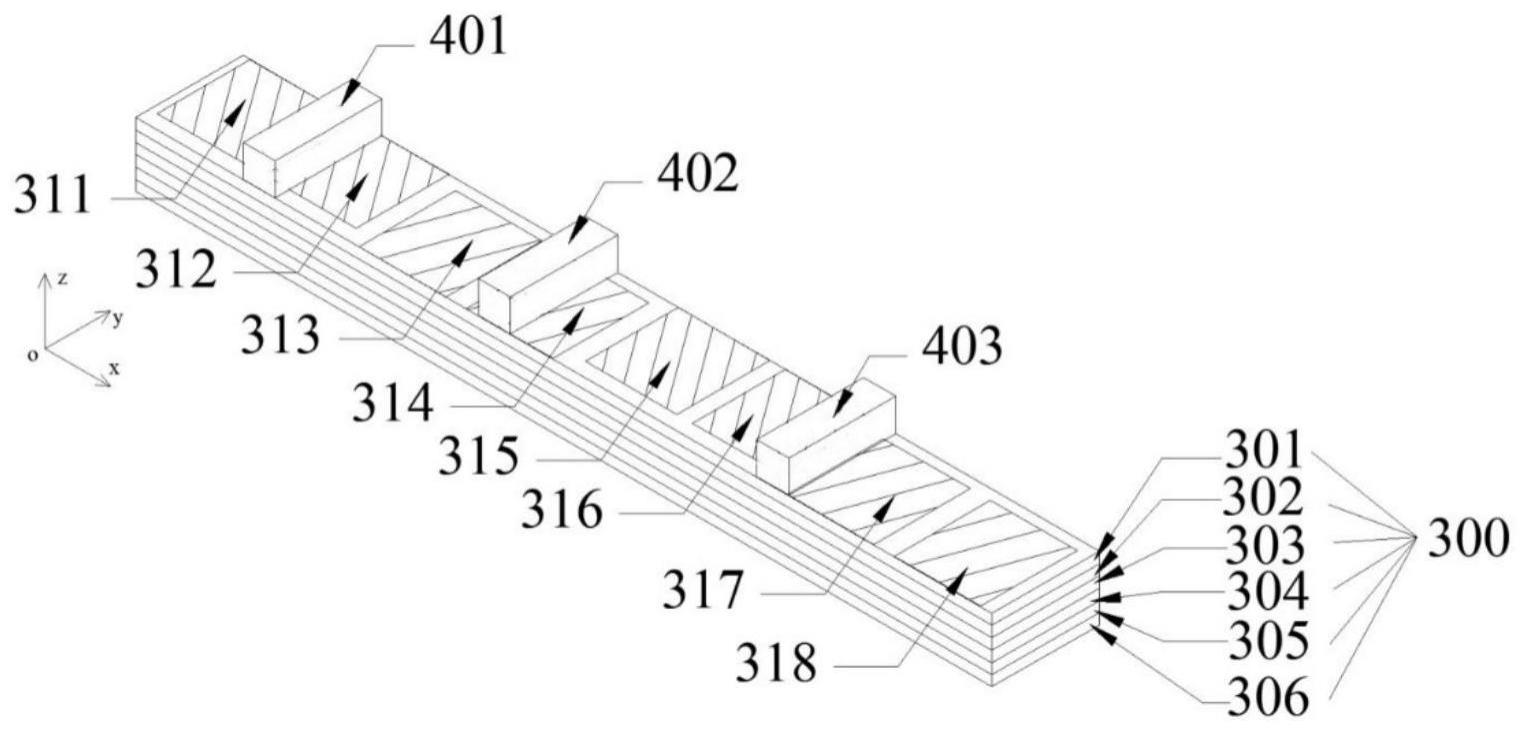
3、一种叠层-多齿微型压电直线执行器,包括压电叠层结构和驱动齿。所述压电叠层结构由至少2层压电片叠堆并连接而成,叠堆方向包括沿压电片的厚度方向;每一层压电片在其相对的两表面均设有电极。所述驱动齿固定连接于压电叠层结构的朝向弯曲振动的振动方向的面上。该压电直线执行器驱动动子沿正向直线运动的工作模态是第三阶弯振模态,驱动动子沿反向直线运动的工作模态是第四阶弯振模态。
4、每一层压电片在其一表面设有ai电极面,对侧表面设有bi电极面;所述ai电极面包括依次序排列的8个电极分区ai1~ai8,用于接入电压信号;所述bi电极面是用于接地的零电势面。所述压电片上的8个电极分区和相邻层的压电片上的8个电极分区按照对应的次序面对面贴合连接,形成依次序排列的8个电势分区八分面ek1~ek8;或以所述bi电极面与相邻层的压电片上的bi+1电极面面对面贴合连接,形成零电势面e0j;最终形成电势分区八分面ek1~ek8与零电势面e0j交错堆叠的叠层结构。
5、所述电极分区ai1~ai8依次等间距排列,且呈中心对称;所述电极分区ai1、ai2、ai5、ai6的外引线的方向朝向压电片的同一侧,所述电极分区ai3、ai4、ai7、ai8的外引线的方向朝向压电片的另外一侧;位于极性分界面同一侧的压电片的电极分区的外引线方向均相同,位于极性分界面及以上的压电片的电极分区的外引线方向均与位于极性分界面以下的压电片对应位置的电极分区的外引线方向相反。所述极性分界面是距离所述压电叠层结构厚度中心面最近的电势分区八分面或零电势面。
6、每一层压电片均包含有与所述8个电极分区ai1~ai8位置相对应的、依次排列的8个极化分区pi1~pi8,所述极化分区的极化方向轴是沿压电片的厚度方向;所述8个极化分区又分为4组,pi1与pi2、pi3与pi4、pi5与pi6、pi7与pi8各为一组,同组的两个极化分区极化方向均相同,位于同一层压电片上的相邻组的极化分区极化方向均相反;位于所述压电叠层结构的极性分界面相邻的两层压电片上的对应排列次序的各极化分区的极化方向均相同,位于所述极性分界面非相邻的压电片的各极化分区的极化方向均与其相邻层压电片上的对应排列次序的极化分区的极化方向相反。
7、位于所述极性分界面及以上的且排列次序相同的每一个电势分区八分面分别一一对应地等电势相连,依次序排列形成d11~d18共8个等电势位;位于极性分界面以下的且排列次序相同的电势分区八分面分别一一对应地等电势相连,依次序排列形成d21~d28共8个等电势位。
8、所述驱动齿的个数为3个或6个,驱动齿布置在所述压电叠层结构的顶面和/或底面上,且位置分布在第三阶弯振振型波峰与第四阶弯振振型波峰的相异侧。
9、一种上述压电直线执行器的极化方法,当极性分界面是距离所述压电叠层结构厚度中心面最近的电势分区八分面时,对所述极性分界面以上的各个零电势面e0j施加直流电压信号u,对所述极性分界面以下的各个零电势面e0j施加直流电压信号-u,将等电势位d11~d18及d21~d28与地线相连;当极性分界面是距离所述压电叠层结构厚度中心面最近的零电势面时,对等电势位d11、d12、d15、d16、d23、d24、d27和d28同时施加极化正向直流电压u,对等电势位d13、d14、d17、d18、d21、d22、d25和d26同时施加极化负向直流电压-u,各个零电势面e0j均与地线相连。
10、一种上述压电直线执行器的驱动方法,包括以下步骤:
11、s1:对等电势位d11、d21、d13、d23、d15、d25、d17和d27同时施加正弦交流电压信号g1,对等电势位d12、d22、d14、d24、d16、d26、d18和d28同时施加正弦交流电压信号g2,所述信号g1和g2交变频率相等、均在以所述压电直线执行器的第三阶弯曲谐振频率为中心限定的频率容差δ1的范围内,且相位相差180°,各个零电势面e0j均与地线相连,以激活所述压电直线执行器的第三阶弯振模态,实现对动子的正方向直线驱动;
12、s2:将所有的等电势位d11~d18及d21~d28同时施加正弦交流电压信号g3,所述信号g3的交变频率在以所述压电直线执行器的第四阶弯曲谐振频率为中心限定的频率容差δ2的范围内,各个零电势面e0j均与地线相连,以激活所述压电直线执行器的第四阶弯振模态,实现对动子的反方向直线驱动;所述频率容差δ1=δ2=±10khz。
13、本发明的有益效果:本发明可以分别激发三阶弯振或四阶弯振位移响应,实现压电执行器的正反双向驱动。本发明采用了压电叠层结构既作为驱动元件,同时也作为执行器的主体支撑结构,没有包含传统压电马达定子的金属基板结构,而且两种工作模态共用压电叠层结构驱动,减轻了重量。此外,叠层结构的场强密度大,可以产生更大的振幅和驱动力,并可降低驱动电压,使得本发明具备外形尺寸小、驱动电压低、负载能力强、推重比高的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!