一种开关柜的一键顺控方法与流程
本发明属于开关柜控制,尤其涉及开关柜的一键顺控方法。
背景技术:
1、随着近年来电网建设的快速发展,电网变电站数量激增,变电运维倒闸操作任务日益繁重。
2、目前,倒闸操作基本采用人工方式,操作前后需完成写票、审核、模拟、五防验证等系列工作,其流程复杂、操作效率很低,且存在人工误操作遭遇内部电弧等安全风险;其次,现有技术也有根据“位置遥信判据和遥测判据”这两个非同样原理的指示发生对应变化,对设备是否操作到位进行判断的,从而根据判断结果对开关柜进行一键顺控。但无论人工方式和现有技术都并不能根据开关柜的实际工作情况和实际工作需求,配合操控装置,实现对开关柜倒闸操作的简单、准确且高效的顺序化控制。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种开关柜的一键顺控方法,通过控制模型对待顺控的开关柜进行一键顺控,解决了现有开关柜倒闸操作流程繁琐、不准确且操作效率低的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、本发明提供的一种开关柜的一键顺控方法,包括如下步骤:
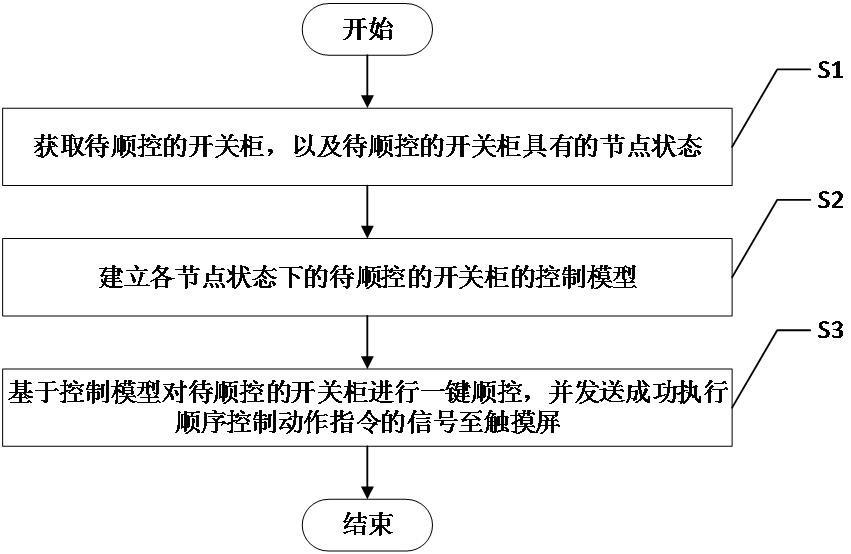
4、s1、获取待顺控的开关柜,以及待顺控的开关柜具有的节点状态;
5、s2、建立各节点状态下的待顺控的开关柜的控制模型;
6、s3、基于控制模型对待顺控的开关柜进行一键顺控,并发送成功执行顺序控制动作指令的信号至触摸屏。
7、本发明的有益效果为:本发明提供的一种开关柜的一键顺控方法,适用于对出线类开关柜、进线类开关柜和隔离类开关柜的倒闸操作进行顺序控制,通过对开关柜的工作节点状态进行节点状态划分,避免了现有开关柜倒闸操作的繁琐控制;本发明分别对各节点状态下的待顺控开关柜模型建立了控制模型,并通过控制模型对待顺控的开关柜的不同节点状态进行正序或逆序的动作指令控制,实现了简单、准确地对开关柜的工作节点一键顺序控制。
8、进一步地,所述待顺控的开关柜为出线类开关柜模型、进线类开关柜模型和隔离类开关柜模型中的任意一种模型;
9、所述出线类开关柜模型具有断路器、手车和地刀;所述出线类开关柜模型的节点状态包括工作节点状态、热备节点状态、冷备节点状态和检修节点状态;
10、所述进线类开关柜模型具有断路器和手车;所述进线类开关柜模型的节点状态包括工作节点状态、热备节点状态和冷备节点状态;
11、所述隔离类开关柜模型仅有手车;所述隔离类开关柜模型的节点状态包括热备节点状态和冷备节点状态。
12、采用上述进一步方案的有益效果为:为能够执行开关柜倒闸操作的出线类开关柜、进线类开关柜和隔离类开关柜分别确定其具有的节点状态,为控制模型根据待顺控的开关柜的节点状态进行一键顺序化控制提供开关柜类型和对应工作范围内的节点状态。
13、进一步地,所述控制模型包括:
14、节点索引号单元,用于将待顺控的开关柜的工作节点状态、热备节点状态、冷备节点状态、检修节点状态分别对应的节点索引号设置为0、1、2、3;
15、当前节点状态单元,用于根据开关柜二次面板的通讯点表和基于modbus-rtu协议获取的运行状态布尔字符串,得到待顺控的开关柜的当前节点状态;
16、动作允许单元,用于根据开关柜二次面板的通讯点表、基于modbus-rtu协议获取的运行状态布尔字符串和动作超时情况,得到待顺控的开关柜的正序动作允许结果和/或逆序动作允许结果;
17、动作指令单元,用于利用操控装置基于modus-rtu协议下发顺序控制动作指令,其中,所述顺序控制动作指令包括正序控制动作指令和逆序控制动作指令;
18、动作成功信号单元,用于在待顺控的开关柜执行完顺序控制动作指令后,基于mqtt协议发送成功执行顺序控制动作指令的信号至触摸屏。
19、采用上述进一步方案的有益效果为:控制模型为待顺控的开关柜的各节点状态分别提供顺序化控制的基础,能够基于modbus-rtu协议获取的运行状态布尔字符串确定待顺控的开关柜的当前节点状态、正序动作允许结果和/或逆序动作允许结果,并获取节点状态对应的节点索引号,基于节点索引号、正序动作允许结果和/或逆序动作允许结果执行顺序控制动作指令,且将顺序控制动作指令成功执行的结果反馈至触摸屏。
20、进一步地,所述根据开关柜二次面板的通讯点表和基于modbus-rtu协议获取的运行状态布尔字符串,得到待顺控的开关柜的当前节点状态的方法包括如下步骤:
21、a1、基于modbus-rtu协议获取待顺控的开关柜的运行状态布尔字符串;
22、a2、利用开关柜二次面板的通讯点表解析运行状态布尔字符串,得到断路器、地刀和手车的运行状态;
23、a3、针对断路器运行状态为在合位不在分位、地刀运行状态在分位不在合位、手车运行状态为在工作位不在试验位时,则待顺控的开关柜的当前节点状态为工作节点状态;
24、a4、针对断路器运行状态为在分位不在合位、地刀运行状态在分位不在合位、手车运行状态为在工作位不在试验位时,则待顺控的开关柜的当前节点状态为热备节点状态;
25、a5、针对断路器运行状态为在分位不在合位、地刀运行状态在分位不在合位、手车运行状态为在试验位不在工作位时,则待顺控的开关柜的当前节点状态为冷备节点状态;
26、a6、针对断路器运行状态为在分位不在合位、地刀运行状态在合位不在分位、手车运行状态为在试验位不在工作位时,则待顺控的开关柜的当前节点状态为检修节点状态。
27、采用上述进一步方案的有益效果为:提供根据开关柜二次面板的通讯点表解析基于modbus-rtu协议获取的运行状态布尔字符串,从而识别待顺控开关柜模型的当前节点状态的具体方法,为开关柜顺序控制过程中利用控制模型确定当前节点状态对应的索引号、进行动作允许确认和执行顺序控制动作指令提供基础。
28、进一步地,所述根据开关柜二次面板的通讯点表、基于modbus-rtu协议获取的运行状态布尔字符串和动作超时情况,得到待顺控的开关柜的正序动作允许结果和/或逆序动作允许结果的方法包括如下步骤:
29、b1、基于modbus-rtu协议,获取运行状态布尔字符串;
30、b2、利用开关柜二次面板的通讯点表解析运行状态布尔字符串,得到断路器、地刀、手车的运行状态、操控装置的位置状态、动作超时情况以及综保故障状态;
31、b3、针对断路器运行状态为在合位不在分位、手车运行状态为在工作位不在试验位、地刀状态为在分位不在合位、操控装置位置状态为远方、动作超时情况为正序动作未超时以及综保故障状态为断路器未故障时,则待顺控的开关柜的正序动作允许结果为断路器分闸动作允许,逆序动作允许结果为空;
32、b4、针对断路器运行状态为在分位不在合位、手车运行状态为在工作位不在试验位、地刀状态为在分位不在合位、操控装置位置状态为远方、动作超时情况为正序动作未超时以及综保故障状态为手车未故障时,则待顺控的开关柜的正序动作允许结果为手车退车动作允许;
33、b5、针对断路器运行状态为在分位不在合位、手车运行状态为在工作位不在试验位、地刀状态为在分位不在合位、操控装置位置状态为远方、动作超时情况为逆序动作未超时以及综保故障状态为断路器未故障时,则待顺控的开关柜的逆序动作允许结果为断路器合闸动作允许;
34、b6、针对断路器运行状态为在分位不在合位、手车运行状态为在试验位不在工作位、地刀状态为在分位不在合位、操控装置位置状态为远方、动作超时情况为正序动作未超时以及综保故障状态为地刀未故障时,则待顺控的开关柜的正序动作允许结果为地刀合闸动作允许;
35、b7、针对断路器运行状态为在分位不在合位、手车运行状态为在试验位不在工作位、地刀状态为在分位不在合位、操控装置位置状态为远方、动作超时情况为正序动作未超时以及综保故障状态为手车未故障时,则待顺控的开关柜的正序动作允许结果为手车进车动作允许;
36、b8、针对断路器运行状态为在分位不在合位、手车运行状态为在试验位不在工作位、地刀状态为在合位不在分位、操控装置位置状态为远方、动作超时情况为逆序动作未超时以及综保故障状态为地刀未故障时,则待顺控的开关柜的正动作允许结果为空,逆序动作允许结果为地刀分闸动作允许。
37、采用上述进一步方案的有益效果为:在确定操作装置位置状态在远方,且综保故障的对象无故障的情况下才允许根据带顺控的开关柜模型执行单步正序动作或单步逆序动作,避免了操作装置为就地时,远程操作引发的误操作和安全隐患,实现了为远程一键顺控与就地通过开关柜控制面板间区别独立地提供控制权限,将不同人员的控制隔离开。
38、进一步地,所述利用操控装置基于modus-rtu协议下发顺序控制动作指令的方法包括如下步骤:
39、c1、将待顺控的开关柜的操控装置位置状态设置为远方;
40、c2、获取待顺控的开关柜的当前节点状态和目标节点状态;
41、c3、根据待顺控的开关柜的当前节点状态和目标节点状态,分别得到当前节点状态对应的节点索引号和目标节点状态对应的节点索引号;
42、c4、判断当前节点状态对应的节点索引号是否小于目标节点状态对应的节点索引号,若是则进入步骤c5,否则进入步骤c6;
43、c5、构建由当前节点状态对应的节点索引号到目标节点状态对应的节点索引号的正序控制动作指令,并基于modus-rtu协议下发正序控制动作指令;
44、c6、构建由当前节点状态对应的节点索引号到目标节点状态对应的节点索引号的逆序控制动作指令,modus-rtu协议下发逆序控制动作指令。
45、采用上述进一步方案的有益效果为:基于待顺控的开关柜的当前节点状态和目标节点状态,根据节点状态索引号的大小比较,即可简单方便地确定下发正序控制动作指令或逆序控制动作指令,实现通过节点状态对开关柜的顺序化控制。
46、进一步地,所述正序控制动作指令包括若干用于执行单步正序动作的指令;所述逆序控制动作指令包括若干执行单步逆序动作的指令;
47、所述单步正序动作包括:断路器分闸,则待顺控的开关柜的节点状态由工作节点状态进入热备节点状态;手车退车,则待顺控的开关柜的节点状态由热备节点状态进入冷备节点状态;地刀合闸,则待顺控的开关柜的节点状态由冷备节点状态进入检修状态;
48、所述单步逆序动作包括:地刀分闸,则待顺控的开关柜的节点状态由检修节点状态进入冷备节点状态;手车进车,则待顺控的开关柜的节点状态由冷备节点状态进入热备节点状态;断路器合闸,则待顺控的开关柜的节点状态由热备节点状态进入工作节点状态。
49、采用上述进一步方案的有益效果为:提供正序控制动作和逆序控制动作分别包括的单步正序动作和单步逆序动作,执行顺序控制动作指令时,逐个执行单步正序动作或单步逆序动作,实现待顺口的开关柜模型的逐步节点状态变化,最多执行3次单步正序动作或3次单步逆序动作,最少只需执行1次单步正序动作或1次单步逆序动作,能够准确、方便地实现开关柜的顺序化控制。
50、进一步地,所述s3包括如下步骤:
51、s31、基于mqtt协议,利用触摸屏向具有控制模型的网关发送包括目标节点状态的顺控命令;
52、s32、利用具有控制模型的网关接收顺控命令,并将控制模型激活;
53、s33、利用当前节点状态单元获取带顺控的开关柜模型的当前节点状态;
54、s34、利用节点索引号单元得到当前节点状态和目标节点状态对应的节点索引号;
55、s35、基于modbus-rtu协议和待顺控的开关柜的当前节点状态,得到运行状态布尔字符串;
56、s36、利用动作允许单元根据开关柜二次面板的通讯点表、运行状态布尔字符串和动作超时情况,得到待顺控的开关柜的正序动作允许结果和/或逆序动作允许结果;
57、s37、基于当前节点状态和目标节点状态对应的节点索引号、待顺控的开关柜的正序动作允许结果和/或逆序动作允许结果,利用动作指令单元下发顺序控制动作指令;
58、s38、利用待顺控的开关柜执行顺序控制动作指令,直至正序控制动作指令或逆序控制动作指令执行完成,进入s39;
59、s39、基于mqtt协议发送成功执行顺序控制动作指令的信号至触摸屏。
60、采用上述进一步方案的有益效果为:本发明基于mqtt协议通过触控屏向网关传输仅仅需确定目标节点状态的顺控命令,实现了远程对开关柜倒闸操作的一键化和顺序化控制,且控制开关柜倒闸操作的流程简单、方便、高效。
61、针对于本发明还具有的其他优势将在后续的实施例中进行更细致的分析。
- 还没有人留言评论。精彩留言会获得点赞!