一种驱鸟设备的管控装置与方法与流程
本发明属于驱鸟管控,具体涉及一种驱鸟设备的管控装置与方法。
背景技术:
1、驱鸟又叫赶鸟,英文里面叫做birdrepellent。广义上说,农场、果园、电力设施、风力发电厂和军民用机场等一切防止有害鸟类侵入自己领地,从而危害自己劳动成果或设备安全的手段都叫驱鸟;狭义上说,驱鸟专指军民用机场为了保护飞行器起降安全,为了防止飞机高速起降时飞鸟被吸入飞机发动机,或撞击飞机机体、起落架、尾翼、挡风玻璃等所有飞机机体,从而在机场关键飞行区、尤其是飞机起飞和降落的跑道或滑行道上采取的一切防止鸟类入侵的听觉恐吓、视觉震慑、直接捕杀、化学、生态或雷达预警等一切手段。
2、在广义驱鸟的条件下,针对电力设施的电力杆塔横担在白天鸟群极容易聚集而使得会对线路造成相间短路等故障从而引起大面积停电的现象,就要引入白天针对电力设施的电力杆塔横担的驱鸟设备,相应的驱鸟设备往往如申请号为“cn202110178688.2”与专利名称为“输电线路多棱镜驱鸟装置”的现有技术方案中所记载,输电线路多棱镜驱鸟装置包含有主控板、电机与三棱镜,这样就能在白天经由主控板操纵电机带动三棱镜旋动,三棱镜同步的把太阳光折射成七彩光旋动,以此驱赶要聚集在电力设施的电力杆塔横担的鸟。
3、而在实际应用中,驱鸟设备的电机是关键的运行部件,其工作工况是不是正确关系到驱鸟设备能不能如常运用,而要侦测电机工作工况是不是正确,往往仅为经由电机送出的功率是不是高过定义的功率顶峰量、电机的转轴送出的转矩是不是高过定义的转矩顶峰量这样的参数执行认定,亦即为若电机送出的功率、转矩与转速未高过构造的顶峰量,电机就不提示有误,认定电机为工作正确的,此类现有的电机工作出错的认定方法,明显已不符合驱鸟设备的电机工作侦测认定的高精准度要求,就像在电机送出的功率、转矩与转速即使未高过构造的顶峰量,未执行高过定义的功率顶峰量、高过定义的转矩顶峰量这样的情形下的提示有误,然而在一时点电机送出的功率、转矩与转速已高过了寻常工作工况,一样的亦常常带有障碍或者工作工况出错,若不能即时寻出电机工作工况出错,短期内就常常让驱鸟设备不能如常运用,驱鸟功能不佳,甚至使得电力设施的电力杆塔横担在白天鸟群极容易聚集而使得会对线路造成相间短路等故障从而引起大面积停电的现象。
4、所以怎样可高效的寻出电机送出工况有别于寻常工作工况,即时辨识带有的障碍风险,确保驱鸟设备如常运用,驱鸟功能佳。
技术实现思路
1、为解决现有技术中带有的缺陷,本发明提出一种驱鸟设备的管控装置,依据以前参数构造正确工况模式,辨识电机工作工况出错,明显有别于目前电机送出高过构造的顶峰量接着执行提示有误的方法,可高效辨识电机一时点的送出的参数出错,不会遭到是不是高过构造顶峰量的约束,带有更佳的电机工作出错侦测力度,符合驱鸟设备对电机工作平稳度的更精准的需求,改善了驱鸟设备工作的安全度;可依据以前参数,主动刷新基本工况阈量,让对电机工作工况出错的辨识普遍可依据真实运用情形执行相适应的主动侦测变动,带有电机工作出错辨识精准度佳和适宜性佳的优点;依据以前参数构造模式的方面,去辨识电机工作工况出错,辨识方法简单高效,安全度佳。
2、本发明运用如下的技术方案。
3、一种驱鸟设备的管控方法,包括:
4、在白天经由主控板操纵电机带动三棱镜旋动,三棱镜同步的把太阳光折射成七彩光旋动,以此驱赶要聚集在电力设施的电力杆塔横担的鸟;另外在电机带动三棱镜旋动时,功率变送器、转矩变送器与转速变送器分别收集电机送出的功率、转矩与转速且传至主控板,主控板经由4g模块把电机送出的功率、转矩与转速传至管控终端执行管控。
5、优选地,管控终端执行管控的方法,包括:
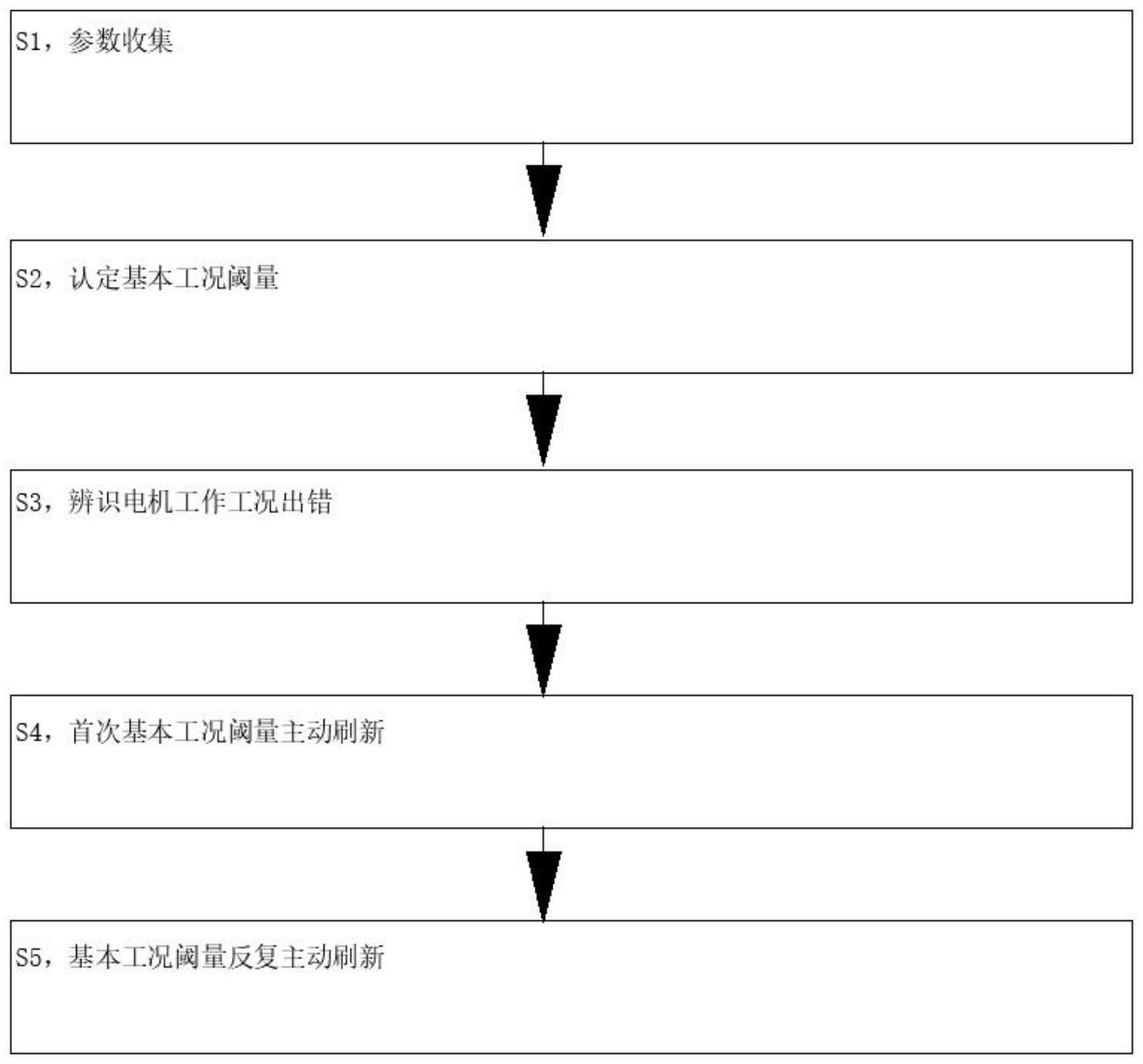
6、s1,参数收集;
7、s2,认定基本工况阈量:
8、s3,辨识电机工作工况出错。
9、优选地,在规定的各个白天工作期间,功率变送器、转矩变送器与转速变送器分别依照事先定义的收集速度收集电机送出的功率量、转矩量与转速量,电机送出的功率量、转矩量与转速量就形成了三个种类的收集的参数,且登记各个参数的收集时点,接着将参数与其收集时点传给主控板,主控板随后将参数与其收集时点经由4g模块传至管控终端,以此达成参数收集。
10、优选地,各个白天工作期间定义成从当日6时到18时的总计12h的时长区间。
11、优选地,事先定义的收集速度为2次/秒或1次/秒。
12、优选地,s2具体包含:
13、将定义的各个白天工作期间等量切割为若干时距,将首日收集的参数依照其收集时点匹配至相应的时距中,各个时距中收集的参数的功率量的顶峰量与谷底量、转矩量的顶峰量与谷底量和转速量的顶峰量与谷底量当做该时距的正确工况阈量,接着在定义的收集日期中对正确工况阈量执行持续刷新,接着将一白天工作期间内全体时距最末的正确工况阈量的组合当做基本工况阈量;
14、各个时距中收集的参数的功率量的顶峰量与谷底量、转矩量的顶峰量与谷底量和转速量的顶峰量与谷底量分别表征该时距中收集的高过该时距中其他功率量的功率量与该时距中收集的低于该时距中其他功率量的功率量、该时距中收集的高过该时距中其他转矩量的转矩量与该时距中收集的低于该时距中其他转矩量的转矩量和该时距中收集的高过该时距中其他转速量的转速量与该时距中收集的低于该时距中其他转速量的转速量。
15、优选地,在定义的收集日期中对正确工况阈量执行持续刷新的方式,包含:
16、下一日的各个时距内收集的参数的功率量的顶峰量与谷底量、转矩量的顶峰量与谷底量和转速量的顶峰量与谷底量同上一日一样时距的一样种类的正确工况阈量执行对照,将二者中更高的数值当做该时距的该种类收集的当前的正确工况阈量的顶峰量,将二者中更低的数值当做该时距的该种类收集的当前的正确工况阈量谷底量,达到定义的收集日期后,将一白天工作期间内全体时距最末的正确工况阈量的组合当做基本工况阈量。
17、优选地,基本工况阈量定义的收集日期为七日。
18、优选地,s3具体包含:
19、在定义的各个白天工作期间,依照事先定义的收集速度收集电机送出的功率量、转矩量与转速量,且登记各次收集的时点;对照各次收集的参数的功率量、转矩量与转速量,是不是分别相应在基本工况阈量相应时距的一样种类的正确工况阈量中,若都在正确工况阈量中,就辨识出电机工作工况正确;若非都在正确工况阈量中,就接着对照该次收集的参数的功率量、转矩量和转速量,是不是分别相应在基本工况阈量相应时距毗邻的后面一时距的一样种类的正确工况阈量内,若都在正确工况阈量内,就辨识出电机工作工况正确,若非都在正确工况阈量内,就辨识出电机工作工况出错;若未有相应的基本工况阈量相应时距毗邻的后面一时距的正确工况阈量,就认定电机工作工况出错。
20、优选地,s3后,还包含:
21、s4,首次基本工况阈量主动刷新;
22、s5,基本工况阈量反复主动刷新。
23、优选地,s4具体包含:
24、对电机工作工况的检测到了定义的日期量后,在定义的日期量内所取得的各个白天收集的参数中,在各个时距任意择用一半的收集的参数当做参数表一,接着在各个时距任意择用一半的的收集的参数当做参数表二,参数表二与参数表一都依照日期自先朝后的次序序列化,将一样日期的相应时距收集的参数组合起来,形成组合式信息表,接着将组合式信息表送进s2,取得当前的基本工况阈量,达成基本工况阈量首次主动刷新。
25、优选地,s5具体包含:
26、在之后的对电机工作工况检测各次到了定义的日期量后,在定义的日期量种所取得的各个白天收集的参数内,各个时距任意择用一半的收集的参数当做参数表一,接着在前面一组合式信息表各个白天的各个时距任意择用一半的收集的参数当做参数表二,参数表二与参数表一都依照日期自先朝后的次序序列化,将一样日期的相应时距收集的参数组合起来,形成当前的组合式信息表,将当前的组合式信息表送进s2,取得当前的基本工况阈量。
27、优选地,电机工作工况检测到了定义的日期量为十四日。
28、一种驱鸟设备的管控装置,包括:
29、管控终端、主控板、电机、4g模块与三棱镜;电机与4g模块都同主控板相连,主控板经由4g模块同4g网内的管控终端通讯相连,电机的转轴与三棱镜转动连接,主控板、电机、4g模块与三棱镜都设于电力设施的电力杆塔横担上;
30、在电机上设有收集其送出的功率的功率变送器,在电机转轴上设有转矩变送器与转速变送器,转矩变送器与转速变送器分别用于收集电机送出的转矩与转速,功率变送器、转矩变送器与转速变送器均同主控板相连。
31、优选地,运行在管控终端上的模块包含:
32、收集模块,其用于参数收集;
33、认定模块,其用于认定基本工况阈量:
34、辨识模块,其用于辨识电机工作工况出错;
35、主动模块,其用于首次基本工况阈量主动刷新;
36、刷新模块,其用于基本工况阈量反复主动刷新。
37、本发明的有益效果在于,与现有技术相比,本发明依据以前参数构造正确工况模式,辨识电机工作工况出错,明显有别于目前电机送出高过构造的顶峰量接着执行提示有误的方法,可高效辨识电机一时点的送出的参数出错,不会遭到是不是高过构造顶峰量的约束,带有更佳的电机工作出错侦测力度,符合驱鸟设备对电机工作平稳度的更精准的需求,改善了驱鸟设备工作的安全度;可依据以前参数,主动刷新基本工况阈量,让对电机工作工况出错的辨识普遍可依据真实运用情形执行相适应的主动侦测变动,带有电机工作出错辨识精准度佳和适宜性佳的优点;依据以前参数构造模式的方面,去辨识电机工作工况出错,辨识方法简单高效,安全度佳。
- 还没有人留言评论。精彩留言会获得点赞!