一种PMLSM的反步控制方法与流程
本技术涉及pmlsm,特别是涉及一种pmlsm的反步控制方法。
背景技术:
1、随着高性能永磁材料的发展以及高端数控机床日益精密化、高速化、智能化的要求,永磁同步直线电机(pmlsm)得到广泛应用。但是由于电机本身结构复杂,系统模型难以精确建构,加之运行时,容易受到负载扰动、外部干扰等影响,控制设计的理论难度极大地增加,因此针对永磁直线电机系统,研究适用的高性能的抗干扰控制方法具有重要的理论与实际工程意义。
技术实现思路
1、本技术的目的是:为解决上述技术问题,本技术提供了一种pmlsm的反步控制方法,旨在消除扰动对pmlsm系统的影响,实现抗干扰控制。
2、本技术的一些实施例中,根据定子电阻和机械子系统干扰时变不可测,认为其导数不为零,将它们引入扩张状态,将系统化为互联子系统的形式,对每一个子系统设计观测器,实现对系统时变的状态量进行有效的观测,利用反步递推法设计控制器实现电机速度跟踪控制,同时进行位移系统拓展,实现电机位移跟踪控制。
3、本技术的一些实施例中,通过建立补偿模型,根据实时的观测值对干扰和不确定性进行扰动补偿,从而消除扰动对系统的影响,实现抗干扰控制,保证pmlsm系统运行的稳定性。
4、本技术的一些实施例中,提供了一种pmlsm的反步控制方法,包括:
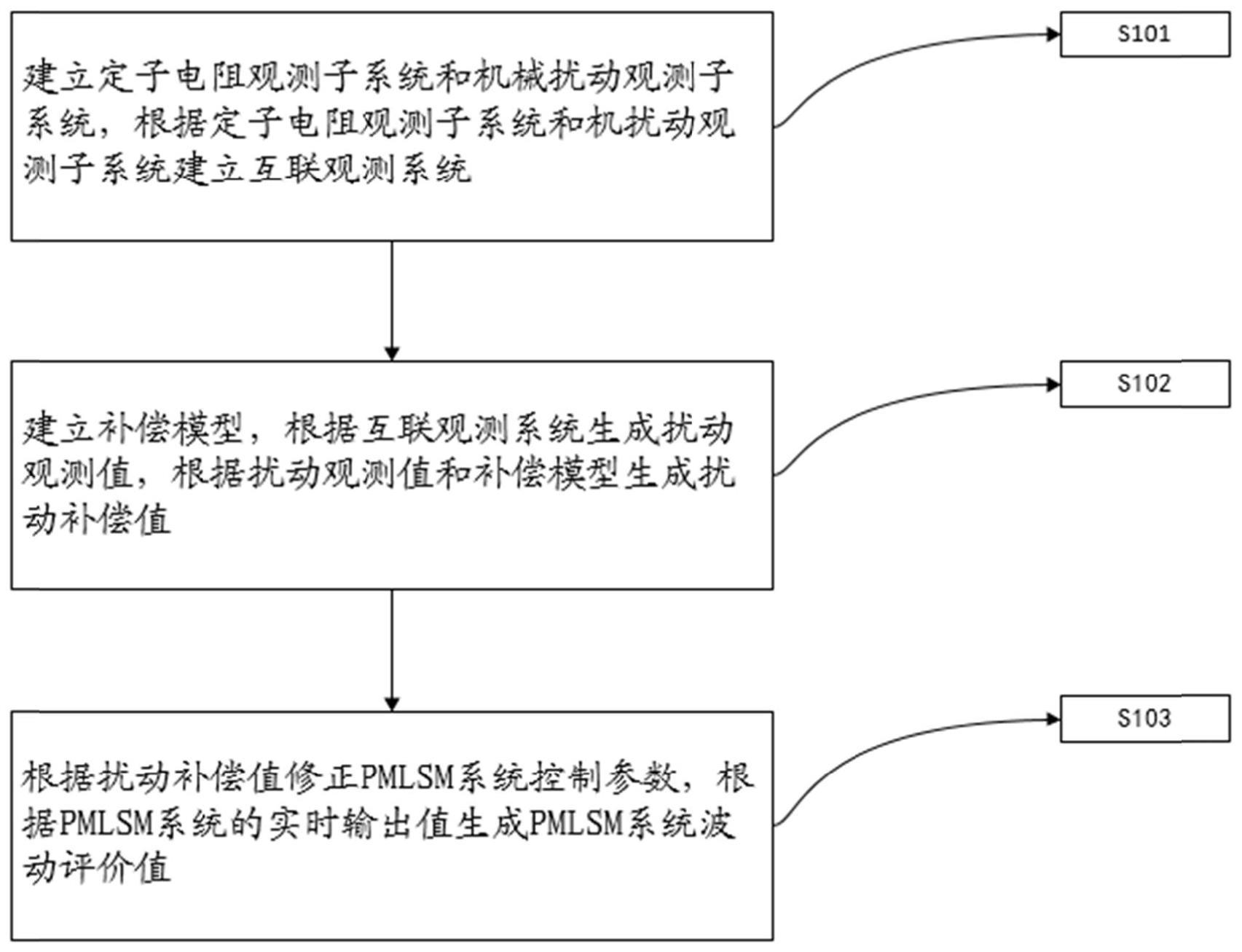
5、建立定子电阻观测子系统和机械扰动观测子系统,根据所述定子电阻观测子系统和所述机扰动观测子系统建立互联观测系统;
6、建立补偿模型,根据所述互联观测系统生成扰动观测值,根据所述扰动观测值和所述补偿模型生成扰动补偿值;
7、根据所述扰动补偿值修正pmlsm系统控制参数,根据pmlsm系统的实时输出值生成pmlsm系统波动评价值。
8、本技术的一些实施例中,所述建立补偿模型时,包括:
9、建立观测值-扰动补偿量映射表;
10、根据所述观测值-扰动补偿量映射表生成多个
11、根据所述定子电阻观测值-扰动补偿量映射表生成训练集数据和检验集数据;
12、根据所述训练集数据进行迭代训练,生成补偿模型。
13、本技术的一些实施例中,所述建立补偿模型时,还包括:
14、根据所述检验集数据生成所述补偿模型的可信度评价值;
15、根据可信度评价值a设定相邻更新时间节点的时间间隔t;
16、根据所述时间间隔t生成更新时间节点;
17、根据所述更新时间节点获取pmlsm系统的实时数据更新所述补偿模型。
18、本技术的一些实施例中,设定相邻更新时间节点的时间间隔t时,包括:
19、预设可信度评价值矩阵a,设定a(a1,a2,a3,a4),其中,a1为预设第一可信度评价值,a2为预设第二可信度评价值,a3为预设第三可信度评价值,a4为预设第四可信度评价值,且a1<a2<a3<a4;
20、预设时间间隔矩阵t,设定t(t1,t2,t3,t4),其中,t1为预设第一时间间隔,t2为预设第二时间间隔,t3为预设第三时间间隔,t4为预设第四时间间隔,且t1<t2<t3<t4;
21、若a1<a<a2,设定时间间隔t为预设第一时间间隔t1,即t=t1;
22、若a2<a<a3,设定时间间隔t为预设第二时间间隔t2,即t=t2;
23、若a3<a<a4,设定时间间隔t为预设第三时间间隔t3,即t=t3;
24、若a>a4,设定时间间隔t为预设第四时间间隔t4,即t=t4。
25、本技术的一些实施例中,所述根据pmlsm系统的实时输出值生成pmlsm系统波动评价值时,包括:
26、获取当前更新时间节点和上一更新时间节点之间的输出值曲线;
27、设定数据采集量n;
28、根据所述数据采集量n和输出值曲线生成一级输出值数列c1,c1=(c1,c2…cn);
29、预设输出值正常区间;
30、根据所述输出值正常区间和所述一级输出值数列c1生成异常输出值数量m;
31、根据所述异常输出值数量m生成一级波动评价值d1;
32、剔除异常输出值生成二级输出值数列c2,c2=(c1,c2…cn-m);
33、根据所述二级输出值数列c2设定补偿系数e,根据所述补偿系数e生成二级波动评价值d2。
34、本技术的一些实施例中,所述根据所述异常输出值数量m生成一级波动评价值d1时,包括:
35、预设异常输出值数量矩阵m,设定m(m1,m2,m3,m4),其中,m1为预设第一异常输出值数量,m2为预设第二异常输出值数量,m3为预设第三异常输出值数量,m4为预设第四异常输出值数量,且m1<m2<m3<m4;
36、预设波动评价值矩阵d,设定d(d1,d2,d3,d4),其中,d1为预设第一波动评价值,d2为预设第二波动评价值,d3为预设第三波动评价值,d4为预设第四波动评价值,且d1<d2<d3<d4;
37、若m1<m<m2,设定一级波动评价值d1为预设第一波动评价值d1,即d1=d1;
38、若m2<m<m3,设定一级波动评价值d1为预设第二波动评价值d2,即d1=d2;
39、若m3<m<m4,设定一级波动评价值d1为预设第三波动评价值d3,即d1=d3;
40、若m>m4,设定一级波动评价值d1为预设第四波动评价值d4,即d1=d4。
41、本技术的一些实施例中,根据所述二级输出值数列c2设定补偿系数e时,包括:
42、根据所述二级输出值数列c2生成平均输出值c;
43、生成一级方差值h;
44、其中,
45、根据所述一级方差值h设定补偿系数e;
46、生成二级波动评价值d2,其中,d2=e*d1。
47、本技术的一些实施例中,根据所述一级方差值h设定补偿系数e时,包括:
48、预设方差值矩阵h,设定h(h1,h2,h3,h4),其中,h1为预设第一方差值,h2为预设第二方差值,h3为预设第三方差值,h4为预设第四方差值,且h1<h2<h3<h4;
49、预设补偿系数矩阵e,设定e(e1,e2,e3,e4),其中,e1为预设第一补偿系数,e2为预设第二补偿系数,e3为预设第三补偿系数,e4为预设第四补偿系数,且1<e1<e2<e3<e4;
50、若h1<h<h2,设定补偿系数e为预设第一补偿次数e1,即e=e1;
51、若h2<h<h3,设定补偿系数e为预设第二补偿次数e2,即e=e2;
52、若h3<h<h4,设定补偿系数e为预设第三补偿次数e3,即e=e3;
53、若h>h4,设定补偿系数e为预设第四补偿次数e4,即e=e4。
54、本技术的一些实施例中,还包括:
55、获取当前更新时间节点的二级波动评价值d2;
56、根据所述二级波动评价值d2设定修正系数k;
57、根据所述修正系数k修正当前更新时间节点和下一时间节点之间的时间间隔t。
58、本技术的一些实施例中,所述设定修正系数k时,包括:
59、预设修正系数矩阵k,设定k(k1,k2,k3,k4),其中,k1为预设第一修正系数,k2为预设第二修正系数,k3为预设第三修正系数,k4为预设第四修正系数,且k1<k2<k3<k4<1;
60、若d1<d<d2,设定修正系数k为预设第四修正系数k4,即k=k4,修正后时间间隔t=k4*ti,(i=1,2,3,4);
61、若d2<d<d3,设定修正系数k为预设第三修正系数k3,即k=k3,修正后时间间隔t=k3*ti,(i=1,2,3,4);
62、若d3<d<d4,设定修正系数k为预设第二修正系数k2,即k=k2,修正后时间间隔t=k2*ti,(i=1,2,3,4);
63、若d>d4,设定修正系数k为预设第四修正系数k1,即k=k1,修正后时间间隔t=k1*ti,(i=1,2,3,4)。
64、本技术实施例一种pmlsm的反步控制方法与现有技术相比,其有益效果在于:
65、根据定子电阻和机械子系统干扰时变不可测,认为其导数不为零,将它们引入扩张状态,将系统化为互联子系统的形式,对每一个子系统设计观测器,实现对系统时变的状态量进行有效的观测,利用反步递推法设计控制器实现电机速度跟踪控制,同时进行位移系统拓展,实现电机位移跟踪控制。
66、通过建立补偿模型,根据实时的观测值对干扰和不确定性进行扰动补偿,从而消除扰动对系统的影响,实现抗干扰控制,保证pmlsm系统运行的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!