基于线性霍尔传感器的直线电机动子位置检测装置的制作方法
本公开涉及直线电机测速,具体而言,涉及一种基于磁性传感的长行程高速直线电机动子位置检测装置。
背景技术:
1、直线电机是一种将电能直接转换成直线运动机械能的传动装置,传统的旋转电机加上一套变换机构组成的直线运动驱动装置已经远远不能满足现代控制系统的要求,直线电机由于结构简单、直接传动、响应快速等突出优点发展迅速,广泛应用于电梯、高速磁悬浮列车、高精度机床等工业领域。动子是直线电机中往复直线运动的机构。直线电机的控制系统必须采用带有动子位置信息反馈的闭环控制,则针对高速直线电机,需要一套具有高可靠性以及高分辨率的动子位置检测系统,动子的精确位置检测是直线电机精确控制运行的必要条件。
2、目前使用较多的位置传感器一般是光栅尺(或磁栅尺),这种位置传感器具有很高的位置分辨率和长度灵活性,例如海德汉的绝对式光栅尺已经能够达到10nm的分辨率,且具有可选的长度。通过合理地设计控制器,位置控制精度可以达到微米级,但是其存在着价格昂贵、易受恶劣环境影响的缺点,当环境中存在较多的粉尘或系统受外界振动影响时,传感器性能会大大下降,工程应用价值不高。
3、针对高速直线电机动子运动的特点,综合非接触式设计、灵敏度、可靠性和抗干扰能力等方面的考虑,可选用霍尔元件对动子位置进行检测。根据霍尔元件工作原理的不同,可以分为开关量霍尔传感器和线性霍尔传感器。
4、开关量霍尔传感器输出只有0和1的开关量形式的位置信号,可以简化工程实现,然而在此类传感器实际应用时,存在结构件加工精度风险和信号延迟误差风险。对于长行程、多分段的直线电机,通常需安装多对霍尔传感器对动子位置的全行程进行完整测量,由于两两霍尔传感器输出的开关量信号的边沿对齐要求很高,这就其安装间距提出了很高要求。除此之外,开关量霍尔传感器对其与被检测面的间距要求很高,一般不超过4mm。由于导磁齿条齿面的加工、位置精度以及传感器的安装位置精度都会存在一定误差,易导致传感器探测面与齿面不平行、传感器阵列中各传感器的探测距离不均匀、方波信号占空比偏离50%等问题,而且在系统中信号经过各元件时也会存在一定延时。这些实际应用中存在的风险和误差均会造成动子位置信号检测的偏差甚至错误。
5、线性霍尔传感器的输出电压与磁场强度在线性范围内成正比,其具有精度较高、体积小、重量轻、成本低等优点。但线性霍尔输出的模拟量信号相较于开关量信号更为难以处理,且易受到电磁干扰,因此需要针对线性霍尔传感器的工作特性专门设计一种适用于长行程高速直线电机动子位置检测装置,对传感器测得的位置信息进行传输和处理,从而使得控制系统获得准确、可靠的电机动子位置信息。
6、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供一种基于线性霍尔传感器的直线电机动子位置检测装置,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、本发明提供一种基于线性霍尔传感器的直线电机动子位置检测装置,包括:
3、磁性元件,沿直线电机动子长度方向布置;
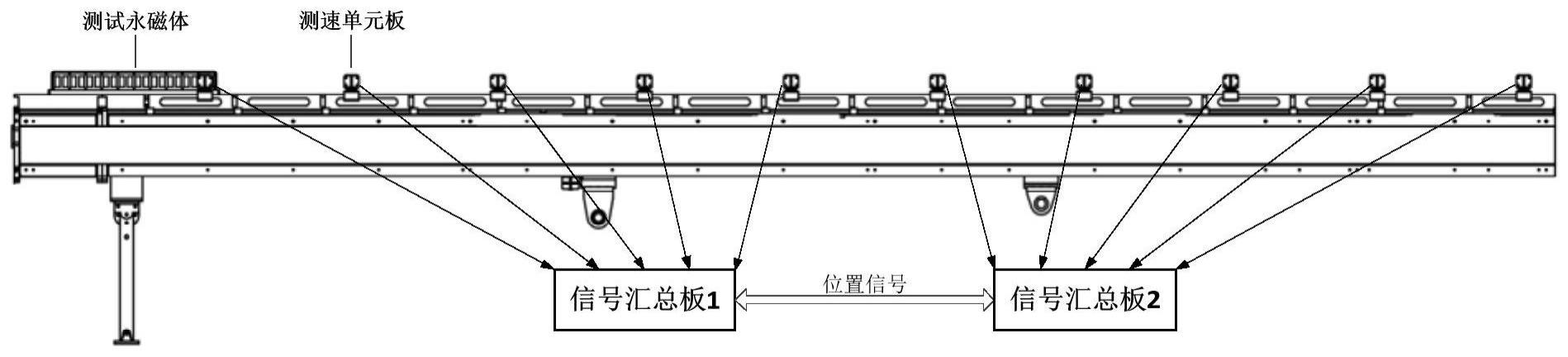
4、多个测速单元,沿平行于直线电机动子行进方向的第一方向间隔设置,且相邻测速单元的间距小于所述磁性元件的长度;
5、其中,所述测速单元包括两个线性霍尔传感器和第一信号处理电路,所述两个线性霍尔传感器将动子经过时感测的磁信号转化为两路正交的单端位置信号,所述第一信号处理电路将两路正交的单端位置信号转换为两组差分位置信号。
6、进一步,还包括信号汇总单元,所述信号汇总单元设置在远离磁性元件所形成的磁场位置并与每个测速单元连接,所述信号汇总单元用于将测速单元输出的两组差分位置信号经过限幅和分压转换为两路单端模拟信号。
7、进一步,还包括模数转换单元,所述模数转换单元分别与所述信号汇总单元和电机控制系统连接,用于将所述信号汇总单元输出的两路单端模拟信号转换为表征动子位置的两路单端数字信号发送至电机控制系统。
8、进一步,所述两个线性霍尔传感器沿所述第一方向间隔设置,且所述两个线性霍尔传感器的间距为所述磁性元件极距的一半。
9、进一步,所述第一信号处理电路包括两个第一运放芯片和两个滤波电路,所述两个第一运放芯片的信号输入端对应与所述两个线性霍尔传感器连接,接收两个线性霍尔传感器的两路正交的单端位置信号,所述第一运放芯片的共模电压控制端通过电容与接地端连接用于调整两组差分信号的共模电压,所述第一运放芯片的信号输出端与滤波电路连接,所述两个第一运放芯片的信号输出端输出预定共模电压的两组差分信号,所述两个滤波电路将所述两个第一运放芯片输出的两组差分信号进行一级rc低通滤波后转换为所述两组差分位置信号。
10、进一步,所述滤波电路包括第一电阻、第二电阻、第三电阻、第四电阻、第一电容和第二电容,所述第一电阻的第一端与所述第二电阻的第一端连接并接入所述差分信号中的一路信号,所述第一电阻的第二端分别与接地端和所述第一电容的第一端连接,所述第二电阻的第二端与所述第一电容的第二端连接并输出所述差分位置信号的一路信号;所述第三电阻的第一端与所述第四电阻的第一端连接并接入所述差分信号中的另一路信号,所述第三电阻的第二端分别与接地端和所述第第二电容的第一端连接,所述第四电阻的第二端与所述第二电容的第二端连接并输出所述差分位置信号的另一路信号。
11、进一步,还包括供电单元,所述供电单元设置在远离磁性元件所形成的磁场位置并向所述信号汇总单元供电;所述信号汇总单元包括电源转换模块和第二信号处理电路,所述电源转换模块将所述供电单元输出的一路供电电压转换为两路供电电压分别向所述线性霍尔传感器和所述第一信号处理电路供电。
12、进一步,所述第二信号处理电路包括第二运放芯片和两个降幅分压电路,所述第二运放芯片的信号输入端对应与所述第一信号处理电路连接,接收第一信号处理电路输出的两组差分位置信号,所述第二运放芯片的信号输出端输出幅值为0-5v的两路单端信号,所述两个降幅分压电路将所述第二运放芯片输出的两路单端信号经过限幅和分压处理后转换为幅值0-3v的两路单端信号。
13、进一步,所述两个线性霍尔传感器在垂直于所述第一方向的第二方向上与所述磁性元件之间的间距为18-25mm。
14、进一步,所述磁性元件为永磁体,所述永磁体固定在直线电机动子的顶部,且所述永磁体的长度与直线电机动子的长度相对应。
15、本发明的基于线性霍尔传感器和磁性元件的非接触式的位置检测装置,并通过将线性霍尔传感器的单端位置信号转换为差分位置信号进行传输,有利于提高应用于长行程高速直线电机工况下的位置信号测量的准确性、可靠性与抗干扰能力。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种基于线性霍尔传感器的直线电机动子位置检测装置,其特征在,包括:
2.如权利要求1所述的位置检测装置,其特征在于,还包括信号汇总单元,所述信号汇总单元设置在远离磁性元件所形成的磁场位置并与每个测速单元连接,所述信号汇总单元用于将测速单元输出的两组差分位置信号经过限幅和分压转换为两路单端模拟信号。
3.如权利要求2所述的位置检测装置,其特征在于,还包括模数转换单元,所述模数转换单元分别与所述信号汇总单元和电机控制系统连接,用于将所述信号汇总单元输出的两路单端模拟信号转换为表征动子位置的两路单端数字信号发送至电机控制系统。
4.如权利要求1所述的位置检测装置,其特征在于,所述两个线性霍尔传感器沿所述第一方向间隔设置,且所述两个线性霍尔传感器的间距为所述磁性元件极距的一半。
5.如权利要求1所述的位置检测装置,其特征在于,所述第一信号处理电路包括两个第一运放芯片和两个滤波电路,所述两个第一运放芯片的信号输入端对应与所述两个线性霍尔传感器连接,接收两个线性霍尔传感器的两路正交的单端位置信号,所述第一运放芯片的共模电压控制端通过电容与接地端连接用于调整两组差分信号的共模电压,所述第一运放芯片的信号输出端与滤波电路连接,所述两个第一运放芯片的信号输出端输出预定共模电压的两组差分信号,所述两个滤波电路将所述两个第一运放芯片输出的两组差分信号进行一级rc低通滤波后转换为所述两组差分位置信号。
6.如权利要求5所述的位置检测装置,其特征在于,所述滤波电路包括第一电阻、第二电阻、第三电阻、第四电阻、第一电容和第二电容,所述第一电阻的第一端与所述第二电阻的第一端连接并接入所述差分信号中的一路信号,所述第一电阻的第二端分别与接地端和所述第一电容的第一端连接,所述第二电阻的第二端与所述第一电容的第二端连接并输出所述差分位置信号的一路信号;所述第三电阻的第一端与所述第四电阻的第一端连接并接入所述差分信号中的另一路信号,所述第三电阻的第二端分别与接地端和所述第第二电容的第一端连接,所述第四电阻的第二端与所述第二电容的第二端连接并输出所述差分位置信号的另一路信号。
7.如权利要求2所述的位置检测装置,其特征在于,还包括供电单元,所述供电单元设置在远离磁性元件所形成的磁场位置并向所述信号汇总单元供电;所述信号汇总单元包括电源转换模块和第二信号处理电路,所述电源转换模块将所述供电单元输出的一路供电电压转换为两路供电电压分别向所述线性霍尔传感器和所述第一信号处理电路供电。
8.如权利要求7所述的位置检测装置,其特征在于,所述第二信号处理电路包括第二运放芯片和两个降幅分压电路,所述第二运放芯片的信号输入端对应与所述第一信号处理电路连接,接收第一信号处理电路输出的两组差分位置信号,所述第二运放芯片的信号输出端输出幅值为0-5v的两路单端信号,所述两个降幅分压电路将所述第二运放芯片输出的两路单端信号经过限幅和分压处理后转换为幅值0-3v的两路单端信号。
9.如权利要求4所述的位置检测装置,其特征在于,所述两个线性霍尔传感器在垂直于所述第一方向的第二方向上与所述磁性元件之间的间距为18-25mm。
10.如权利要求1所述的位置检测装置,其特征在于,所述磁性元件为永磁体,所述永磁体固定在直线电机动子的顶部,且所述永磁体的长度与直线电机动子的长度相对应。
技术总结
本发明公开了一种基于线性霍尔传感器的直线电机动子位置检测装置,包括磁性元件和多个测速单元;其中,所述测速单元包括两个线性霍尔传感器和第一信号处理电路,所述两个线性霍尔传感器将动子经过时感测的磁信号转化为两路正交的单端位置信号,所述第一信号处理电路将两路正交的单端位置信号转换为两组差分位置信号。本发明的基于线性霍尔传感器和磁性元件的非接触式的位置检测装置,并通过将线性霍尔传感器的单端位置信号转换为差分位置信号进行传输,有利于提高应用于长行程高速直线电机工况下的位置信号测量的准确性、可靠性与抗干扰能力。
技术研发人员:张东淮,李遥,姚宏伟,李艳明
受保护的技术使用者:北京机械设备研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!