一种基于子控制集改进MPC算法的MMC控制方法
本发明涉及电力设备,尤其是一种基于子控制集改进mpc算法的mmc控制方法。
背景技术:
1、近年来,由于气候与能源问题愈加严峻,世界各国都在大力发展风电、水电、太阳能等清洁能源。柔性直流输电hvdc系统是实现远距离输送可再生能源的关键技术,其具有输电容量高、控制灵活等优点,在城市电网供电、海上风电并网等方面有广阔的应用前景。
2、模块化多电平换流器(modular multilevel converter,mmc)由于其开关频率低、输出波形质量高、子模块可拓展性高等特点被广泛应用于柔性直流输电系统中。控制策略是保证基于mmc的柔性直流输电系统高效稳定运行的关键,传统的双闭环控制具有良好的控制性能,但其参数整定繁琐,动态响应速度慢;模型预测控制能够处理对多目标和多约束的控制,但其应用于mmc时会产生计算量过大的问题;针对以上问题,对模型预测控制进行改进。
3、目前mmc控制研究主要还是集中在改进传统的pi上面,但是当应对复杂的系统变化和故障情况时,pi可能存在性能的限制。例如
4、a.延迟响应:pi控制通常依赖于采样和计算过程,存在一定的延迟。当系统发生快速变化或突发故障时,pi控制可能无法及时响应,导致控制性能下降。特别是在需要快速控制的高动态场景下,pi控制的响应速度可能不足
5、b.受限的鲁棒性:传统pi控制的参数通常是固定的,对于系统参数变化或不确定性的鲁棒性较差。在实际应用中,mmc系统的参数可能受到多种因素影响,如温度变化、元件老化等,这可能导致pi控制器的性能下降或不稳定。
6、c.复杂耦合的控制:mmc系统中存在多个模块和多个电压/电流变量之间的复杂耦合关系。传统pi控制难以处理这种复杂性,并且无法充分考虑变量之间的相互影响。因此,在需要进行协同控制和优化的场景下,pi控制的性能可能受到限制。
7、模型预测控制(mpc):mpc使用mmc的动态模型来进行优化控制,通过预测系统行为并考虑约束条件,以选择最优的控制策略。mpc能够在快速变化的条件下实现较好的控制性能,但其计算复杂性较高。
技术实现思路
1、本发明提出一种基于子控制集改进mpc算法的mmc控制方法,在改进算法的动态过程中,采用了基于二分法动态寻优方法,能在减少计算量的同时提高改进mpc算法在系统功率发生变化时的动态响应速度。
2、本发明采用以下技术方案。
3、一种基于子控制集改进mpc算法的mmc控制方法,能在减少计算量的同时提高改进mpc算法在系统功率发生变化时的动态响应速度,所述mpc算法应用于基于有限控制集的换流器fcs-mpc;逆变器mmc包括a、b、c三个相似的相单元,每个相单元由上、下两个桥臂组成,每个桥臂由一个电抗器l0,一个电阻r0和级联的n个子模块构成;电抗器用于抑制能量分配不平衡所产生的相间环流;所述控制方法在mmc逆变器稳态工况即控制器给定的参考信号不变时,使相邻两个开关周期投入的子模块数量的变化很小,以将mpc中滚动优化算法过程所需要预测的有限控制集缩小到很小的范围内;在mmc逆变器动态工况时,通过设置阈值的方法来判断系统功率是否发生变化,当信号发生突变时,利用二分法快速寻找到突变后信号所对应的子控制集。
4、mmc逆变器的a、b、c任一相的数学模型中,sm表示桥臂的一个子模块,每个桥臂都有n个子模块;l0、r0表示桥臂电抗和电阻;lsj表示线路电抗,udc表示直流侧电压,upj、unj分别表示上下桥臂子模块电压之和,usj表示并网电压;ipj、inj分别表示流过上下桥臂的桥臂电流,ivj表示并网电流;其中j(j=a、b、c)表示abc三个相单元;
5、当上下桥臂所投入的子模块数目不一样时形成电压差,通过不断改变上下桥臂投入子模块的个数形成输出的正弦波;对其进行数学分析,分别对该相的两个回路分别列写kvl方程,如下述公式一、公式二;
6、
7、
8、式中udc表示直流端电压,upj、unj分表表示上下桥臂所以子模块输出电压之和,usj表示交流端输出电压,其中j表示三相(j=a,b,c);ipj、inj表示上下桥臂的桥臂电流,ivj表示交流端的电流;r0、l0分别表示桥臂线路等效阻抗和电感,lsj表示线路电抗;
9、令差模电压:udiff=(unj-upj)/2,r=r0/2,l=lsj+l0/2;
10、通过((公式一)+(公式二))/(公式二)得到差模电压与输出电流的数学关系式。如下述公式三所示;
11、
12、令共模电压:ucomj=(unj+upj)/2,环流:icirj=(ipj+inj)/2,得共模电压与环流的关系式,如下述公式四所示。
13、
14、对公式三、公式四采用一阶向前欧拉法进行离散化,如公式五、公式六所示
15、
16、
17、式中k+1,k分别表示在那一时刻的值,ts表示采样周期。
18、fcs-mpc中的有限控制集是由换流器中所有可能的开关状态构成的,通过对换流器系统进行建模,运用遍历的方法得到所有开关状态下系统的输出,最后通过计算和对比每个开关状态下的目标函数值决策出最理想的开关状态,即控制换流器的输出与设定的信号时刻保持最为近似的状态,从而保证控制目标的实现;
19、滚动优化算法在一个控制周期内完成信息的采样、预测量的计算和目标函数最小值的选择操作;
20、为避免出现延时控制的问题,将公式五目标函数设计为k+1时刻的预测输出电流与输出电流指令值之间的偏差值,即:
21、obj=|ivjref(k+1)-ivj(k+1)| 公式七;
22、式中,ivjref(k+1)表示k+1时刻mmc的j相输出电流指令值;
23、若系统处于稳态运行状态,则将mpc中滚动优化过程所需要预测的有限控制集缩减到很小的范围内;为了避免出现因交流侧电压的变化率过大,导致缩小fcs-mpc滚动优化过程中的预测控制集后出现mmc输出电压无法快速跟踪参考电压的问题,首先需要计算参考电压可能跳变的电平数量;
24、假设第j相交流侧电网电压电流的时域解析表达式如以下公式八
25、
26、将公式八带入公式三中,化简后得到:
27、udiffj=mcos(ωt+δj)+nsin(ωt+δj) 公式九;
28、式中:
29、
30、
31、对公式九求导并化简得到:
32、
33、公式十二即为mmc等效输出电压在相邻采样时刻的近似变化量;
34、假设mmc子模块电容电压均衡且其均值为udc/n,则相邻采样时刻mmc输出电平等级的变化量δk的取值范围应为:
35、
36、式中,[x]表示不超过x的最大整数;
37、若当sin(ωkts-ξ)=1时,mmc等效输出电压在相邻采样时刻的近似变化量最大,则为使mmc-hvdc在稳态工况下的fcs-mpc控制器能取得较好的控制效果,应当使相邻控制周期mmc的等效输出电压电平等级变化量满足:
38、
39、当mmc用于hvdc系统,在mmc-hvdc系统稳定运行时,基于子控制集的改进mpc算法具体通过以下步骤运行控制:
40、步骤s1、根据公式三选择稳态时mpc滚动优化的控制集大小h=2δx+1,其中δx满足公式三最小整数δk;
41、步骤s2、选择上一时刻得到的最优开关状态组合和其相邻的2δx个开关状态作为控制集;
42、步骤s3、根据公式五计算上一步所选择控制集中的开关状态对应的预测电流值,并通过最小化公式七进行滚动优化寻优,得到当前时的最优开关状态组合。
43、当mmc用于hvdc系统,在mmc-hvdc系统的输出功率发生变化后,快速找到合适的子控制集用于滚动优化的方法为:通过设置阈值的方法来判断系统功率是否发生变化,当相邻两个控制周期的参考电流偏差值小于所设阈值,判断系统处于稳态运行状态,反之则判断系统进入动态调整过程,采用基于子控制集mpc的二分法动态寻优方法快速找到相应的子控制集。
44、利用二分法快速寻找突变后信号所对应的子控制集的方法为:首先设定子控制集的大小,为了保证控制系统的稳定,所设子控制集中包含的开关状态组合数量应大于一个控制周期内系统输出可能改变的最大电平数;
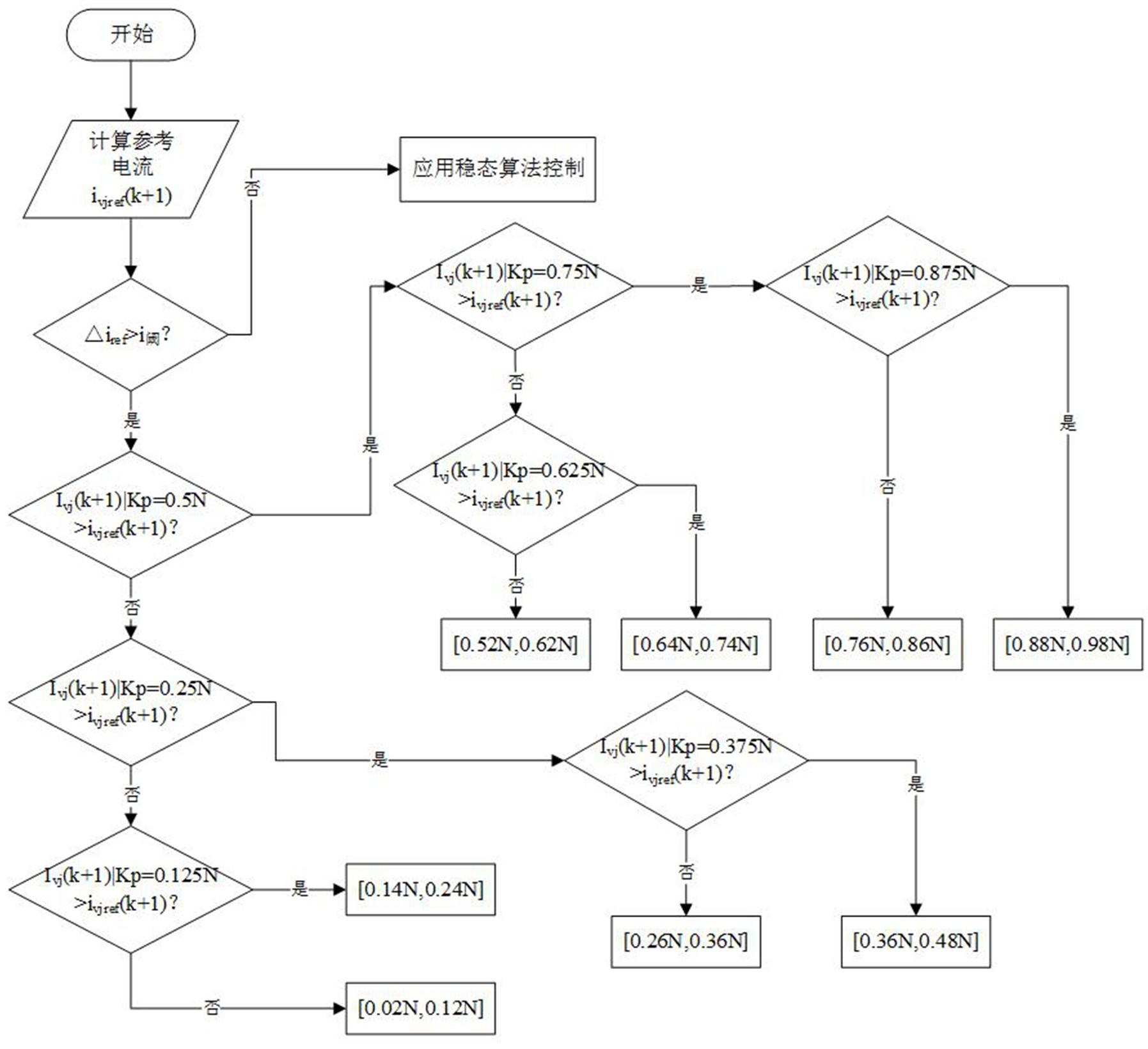
45、设上桥臂投入子模块数量范围为[0,n],则子控制集包含的开关状态组合数量为0.1n;依据公式五所述表述的交流侧电流的预测值ivj(k+1)随着上桥臂投入子模块数量增大而减小的规律,把子模块分为8个子控制集,分别为[0.02n,0.12n]、[0.14n,0.24n]、[0.26n,0.36n]、[0.38n,0.48n]、[0.52n,0.62n]、[0.64n,0.74n]、[0.76n,0.86n]、[0.88n,0.98n],设计基于二分法的动态寻优算法。
46、当检测到系统给定电流发生突变时,则依据二分法重新选择子控制集;包括以下步骤;
47、步骤a1、计算k+1时刻的参考电流,并计算其与k时刻参考电流的偏差值;步骤a2、判断步骤a1中得到的偏差值是否超过所设定的阈值;若小于阈值,则判断系统处于稳态运行状态,通过上一控制周期所得到的最优开关状态获取当前控制周期滚动优化过程中的子控制集;若大于阈值,则判断系统进入动态调整过程,进入步骤a3;
48、步骤a3、计算开关组合为(0.5n,0.5n),即上桥臂投入0.5n个子模块,下桥臂投入0.5n个子模块时的预测电流,并将其与k+1时刻的参考电流作比较。若该预测电流小于参考电流,则判断最优子控制集在[0.02n,0.12n]、[0.14n,0.24n]、[0.26n,0.36n]、[0.38n,0.48n]这四个控制集中,反之,则在[0.52n,0.62n]、[0.64n,0.74n]、[0.76n,0.86n]、[0.88n,0.98n]这四个控制集中;
49、步骤a4、通过步骤3所得到的范围,选择计算开关组合为(0.25n,0.75n)或(0.75n,0.25n)的预测电流,用与步骤3类似的方式进一步缩小最优子控制集的范围;
50、步骤a5、通过步骤a4所得到的范围,选择计算开关组合为(0.125n,0.875n)、(0.375n,0.625n)、(0.625n,0.375n)或(0.875n,0.125n)的预测电流,在这一步即可直接得到最优子控制集;
51、上述步骤采用基于二分法的动态寻优方法,经过三次计算来找到最优开关状态组合所处的子控制集,即使此时划分的8个子控制集并未覆盖所有开关状态组合,则在后续最多通过两个控制周期来找到最优开关状态,过程中忽略的小部分开关状态组合对整体的控制效果影响很小。
52、本发明在改进算法的动态过程中,采用了基于二分法动态寻优方法,能在减少计算量的同时提高改进mpc算法在系统功率发生变化时的动态响应速度。
- 还没有人留言评论。精彩留言会获得点赞!