同步永磁电机转子的角度位置标定系统及控制方法与流程
本发明涉及电机控制领域,具体地涉及同步永磁电机转子的角度位置标定系统及控制方法。
背景技术:
1、同步永磁电机作为混合电动汽车的一个不可替代的组成部分,角度位置传感器在其中扮演着重要角色。永磁同步电机的控制是基于转子磁极角度与定子线圈的电流相位的精确控制来保证相关的转速/力矩控制。要使其正常且高效运行,必须通过角度位置传感器,能够准确测量转子的转动角度,从而控制定子绕组中的三相电流的相位,使得在电机中产生相应耦合电磁矩,最大效率的运转转子。
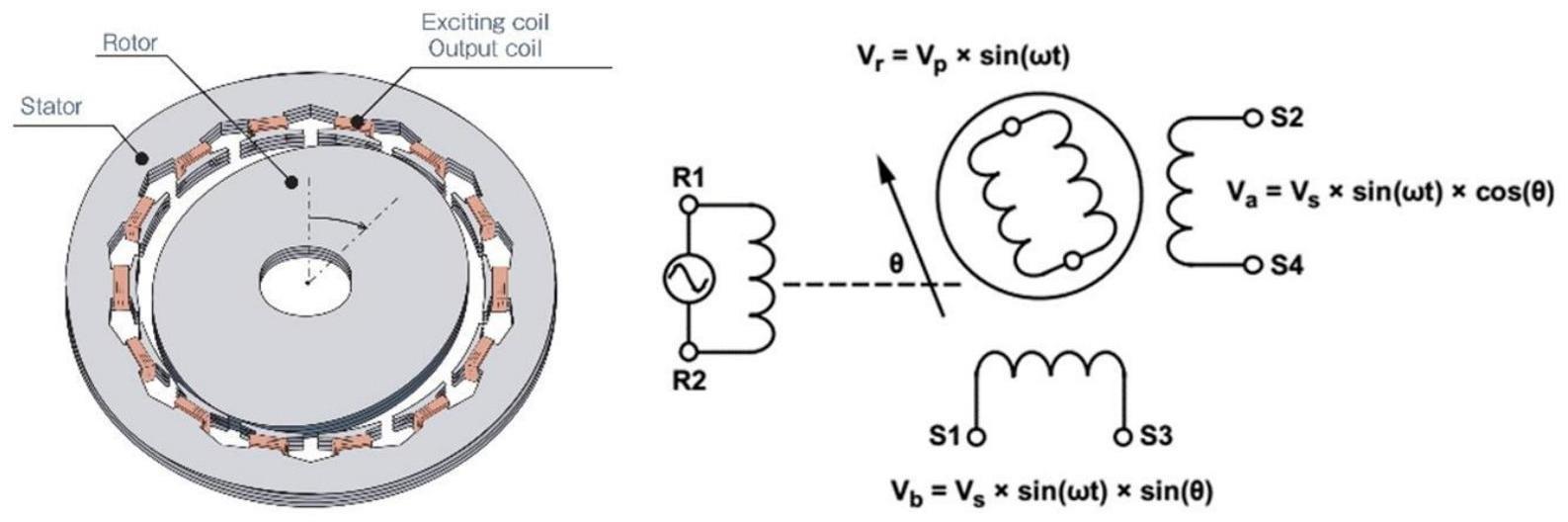
2、如图1所示,目前电动汽车永磁同步电机通常采用的是旋变传感器(旋转变压器)来标定转子的角度位置。旋变传感器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。旋变由转子和定子绕组构成,并且两者相互独立,初级和次极线圈都绕在定子上,转子由两组相差90°线圈组成,采用无刷设计,转子和定子分离。
3、现有技术的缺陷在于:
4、1.传感器结构复杂,制造成本高;
5、2.需要匹配专门的rdc解码器,实现旋变解码;
6、3.能耗较高;
7、4.功能安全等级无法满足asil-c。
技术实现思路
1、本发明针对上述问题,提供同步永磁电机转子的角度位置标定系统及控制方法,其目的在于本发明简化传感器结构,降低制造成本;不需要专门的rdc解码器;能耗较低;实现差分模拟信号输出,降低共模噪音干扰,提高可靠性;开发合适的算法,提高传感器的安全可靠性。
2、为解决上述问题,本发明提供的技术方案为:
3、一种同步永磁电机转子的角度位置标定系统,包含磁电式涡流传感器;所述磁电式涡流传感器用于提供差分形式的sin+输出信号、sin-输出信号、cos+输出信号、cos-输出信号;所述磁电式涡流传感器包含传感器、信号轮转子;其中:
4、所述信号轮转子用于在自身的表面产生涡流;所述信号轮转子由导电性材料制成;
5、所述传感器包含pcb;所述pcb包含初级励磁电流线圈、次级线圈;其中:
6、所述次级线圈用于接受涡流磁场。
7、优选地,所述初级励磁电流线圈连接固定电容值的电容;所述初级励磁电流线圈由所述pcb上的集成芯片驱动产生的高频电流信号激发以形成高频振荡电路;所述高频振荡电路在所述初级励磁电流线圈附近产生变化的磁场,与所述次级线圈互感耦合。
8、优选地,所述次级线圈包含两组独立绕组;两组所述独立绕组分别产生互为90°电角度相位偏移的sine输出电压信号、cosine输出电压信号;
9、两组所述独立绕组以sine和cosine波形几何形状绕成;
10、优选地,所述磁电式涡流传感器提供的所述sin+输出信号、所述sin-输出信号、所述cos+输出信号、所述cos-输出信号还经过优化处理流程,得到优化后的差分形式的sin+输出信号、sin-输出信号、cos+输出信号、cos-输出信号;
11、所述优化处理流程以此包含调制解调子流程、自动增益控制子流程、高压输出防护子流程。
12、优选地,优化后的所述sin+输出信号、所述sin-输出信号、所述cos+输出信号、所述cos-输出信号经过ecu处理,得到sin_diff差分信号、cos_diff差分信号。
13、一种利用了上述的同步永磁电机转子的角度位置标定系统的同步永磁电机转子的角度位置控制方法,包含以下步骤:
14、s100.执行输出信号电压范围检测;然后根据检测结果,做出如下操作:
15、如果所述输出信号电压范围检测的检测结果为输出信号在人工预设正常电压范围内,则执行s200;
16、如果所述输出信号电压范围检测的检测结果为输出信号不在所述正常电压范围内,则发出信号不正常警报和维修请示警报;然后结束本次同步永磁电机转子的角度位置控制方法的流程;
17、s200.执行输出信号共模电压检测;然后根据检测结果,做出如下操作:
18、如果所述输出信号共模电压检测的检测结果为所述sin+输出信号、所述sin-输出信号经过低通滤波后的共模值满足人工预设的共模值合格条件,且所述cos+输出信号、所述cos-输出信号经过低通滤波后的共模值满足所述共模值合格条件,则执行s300;
19、如果所述输出信号共模电压检测的检测结果为所述sin+输出信号、所述sin-输出信号经过低通滤波后的共模值不满足所述共模值合格条件,或所述cos+输出信号、所述cos-输出信号经过低通滤波后的共模值不满足所述共模值合格条件,则发出所述信号不正常警报和所述维修请示警报;然后结束本次同步永磁电机转子的角度位置控制方法的流程;
20、s300.执行幅值归一化检测;然后根据检测结果,做出如下操作:
21、如果所述幅值归一化检测的检测结果为幅值满足人工预设的幅值归一化合格条件,则执行s400;
22、如果所述幅值归一化检测的检测结果为幅值不满足所述幅值归一化合格条件,则发出所述信号不正常警报和所述维修请示警报;然后结束本次同步永磁电机转子的角度位置控制方法的流程;
23、s400.执行差分一致性检测;然后根据检测结果,做出如下操作:
24、如果所述差分一致性检测的检测结果为差分一致性未超过人工预设的差分一致性阈值,则发出检测合格信号;然后结束本次同步永磁电机转子的角度位置控制方法的流程;
25、如果所述差分一致性检测的检测结果为差分一致性超过所述差分一致性阈值,则将所述磁电式涡流传感器置为安全诊断模式。
26、优选地,s100中所述输出信号电压范围检测具体包含以下步骤:
27、s110.连续采集所述sin+输出信号、所述sin-输出信号、所述cos+输出信号、所述cos-输出信号;然后获取其中的输出信号最大值、输出信号最小值;
28、s120.检测供电电源电压;然后根据所述供电电源电压的值做出如下操作:
29、如果所述供电电源电压的值为5v,则执行s130;
30、如果所述供电电源电压的值不为5v,则返回并再次执行s110;
31、s130.由ecu检测s110中获取的所述输出信号最大值是否介于0.25v到4.75v之间;然后根据检测结果,做出如下操作:
32、如果s110中获取的所述输出信号最大值介于0.25v到4.75v之间,则执行s140;
33、如果s110中获取的所述输出信号最大值不介于0.25v到4.75v之间,则将所述输出信号电压范围检测的检测结果置为输出信号不在所述正常电压范围内;
34、s140.由ecu检测s110中获取的所述输出信号最小值是否介于0.25v到4.75v之间;然后根据检测结果,做出如下操作:
35、如果s110中获取的所述输出信号最小值介于0.25v到4.75v之间,则将所述输出信号电压范围检测的检测结果置为输出信号在所述正常电压范围内;
36、如果s110中获取的所述输出信号最小值不介于0.25v到4.75v之间,则将所述输出信号电压范围检测的检测结果置为输出信号不在所述正常电压范围内。
37、优选地,s200中所述sin+输出信号与所述sin-输出信号的共模值按下式表达:
38、sin_com=(sin+)+(sin-)
39、其中:sin_com为所述sin+输出信号与所述sin-输出信号的共模值;sin+为所述sin+输出信号的采集值;sin-为所述sin-输出信号的采集值;
40、s200中所述cos+输出信号与所述cos-输出信号的共模值按下式表达:
41、cos_com=(cos+)+(cos-)
42、其中:cos_com为所述cos+输出信号与所述cos-输出信号的共模值;cos+为所述cos+输出信号的采集值;cos-为所述cos-输出信号的采集值;s200中所述共模值合格条件按下式表达:
43、
44、其中:vcc为所述供电电源电压;sin_com_filtered为所述sin+输出信号与所述sin-输出信号经过低通滤波后的共模值;cos_com_filtered为所述cos+输出信号与所述cos-输出信号经过低通滤波后的共模值。
45、优选地,s300中所述幅值归一化合格条件按下式表达:
46、1-error≤sin2(θ)+cos2(θ)≤1+error
47、其中:error为精度补偿量,由人工预设;θ为转子的位置角度;sin(θ)为对sin+(cos+)经过偏置补偿与幅值归一后得到的输出信号;cos(θ)为对sin-(cos-)经过偏置补偿与幅值归一后得到的输出信号;
48、所述sin+输出信号、所述sin-输出信号、所述cos+输出信号、所述cos-输出信号按下式表达:
49、
50、其中:vps为单端输出信号sin+(sin-)的幅值;vpc为单端输出信号cos+(cos-)的幅值;vos为单端输出信号sin+(sin-)的偏置电压;voc为单端输出信号cos+(cos-)的偏置电压;
51、sin(θ)和cos(θ)按下式表达:
52、
53、其中:sin_diff为所述sin_diff差分信号;cos_diff为所述cos_diff差分信号;sin_diff和cos_diff按下式表达:
54、
55、offset_sin和offset_cos为偏置电压,按下式表达:
56、
57、amplitude_sin和amplitude_cos为电压幅值,按下式表达:
58、
59、优选地,s400中所述差分一致性检测具体包含以下步骤:
60、s410.获取电机实际转子机械转速与电机极对数;
61、s420.根据所述电机实际转子机械转速与所述电机极对数计算得到电机转子旋转的电角度频率,按下式表达:
62、fel=rotor_speed*npp/60
63、其中:fel为所述电机转子旋转的电角度频率,单位为hz;rotor_speed为所述电机实际转子机械转速,单位为rpm;npp为所述电机极对数,单位为s/min;
64、s430.设置采样频率;所述采样频率为所述电机转子旋转的电角度频率的整倍数,按下式表达:
65、fs=n*fel
66、其中:fs为所述采样频率;n为倍数;
67、s440.通过adc模数转换采样后,计算得到差分信号,按下式表达:
68、
69、其中:δsin(n)和δcos(n)都为差分信号;
70、s450.计算得到转子的位置角度,按下式表达:
71、
72、s460.比较信号(sin(n-1)、cos(n-1)与差分信号δcos(n)、δsin(n)之间的一致性,按下式表达:
73、abs(θest(n)-θout(n-1))<threshold
74、其中:threshold为所述差分一致性阈值。
75、本发明与现有技术对比,具有以下优点:
76、1.本发明简化了传感器结构,降低了制造成本;
77、2.本发明不需要专门的rdc解码器;
78、3.本发明能耗较低;
79、4.本发明实现了差分模拟信号输出,降低了共模噪音干扰,提高了可靠性;
80、5.本发明开发了合适的算法,提高了传感器的安全可靠性。
- 还没有人留言评论。精彩留言会获得点赞!