基于饱和切换模型的多馈入交直流混联系统稳定控制方法与流程
本发明属于直流输电系统(high voltage direct current,hvdc)运行控制,具体涉及一种基于饱和切换模型的多馈入交直流混联系统稳定控制方法。
背景技术:
1、随着众多特高压直流工程的投运,交直流混联电网的格局逐渐形成,但特高压直流和交流工程的布局并不均衡,呈现“强直弱交”的特点。因此,“强直弱交”背景下,直流系统的运行应全面考虑受端电网的稳定问题。多直流系统和高比例新能源之间、交直流混联电网送受端之间的交互耦合程度进一步加深,特高压直流一旦发生连续换相失败乃至闭锁故障,引发的大范围、高功率、瞬时潮流转移对交流电网形成强冲击,极易突破交流电网安全稳定极限,引发系统性连锁故障,造成大规模停电事故。
2、目前,交直流混联系统稳定性研究方面多采用直接法,在交流系统稳定性领域进行延拓,以期寻找适用于交直流混联系统的能量函数构建方法及临界能量的求取方法,但尚未从根本上解决直流系统的强非线性特点带来的建模困难的问题。此外,直流控制方式和关键控制环节对交直流混联系统暂态稳定性的影响方面多停留于定性的关系揭示,缺乏定量的关系表达,难以描述不同控制方式的切换过程对系统稳定性的影响。以提升系统稳定性为目标的直流控制方式切换策略研究较少,多集中于控制环节参数优化,但存在控制器结构复杂,参数取值缺乏理论支撑问题。
技术实现思路
1、针对现有技术的缺陷,本发明公开了一种基于饱和切换模型的多馈入交直流混联系统稳定控制方法。
2、为实现上述目的,本发明采用如下技术方案:
3、一种基于饱和切换模型的多馈入交直流混联系统稳定控制方法,包括如下步骤:
4、s1、建立多馈入交直流混联系统饱和切换模型;
5、s2、对步骤s1所建立的多馈入交直流混联系统饱和切换模型进行连续性转换,得到多馈入交直流混联系统饱和切换连续模型;
6、s3、基于步骤s2所建立的多馈入交直流混联系统饱和切换连续模型,并利用混联系统的lyapunov函数,对多馈入交直流混联系统稳定控制。
7、优选地,步骤s1中所述建立多馈入交直流混联系统饱和切换模型,包括:
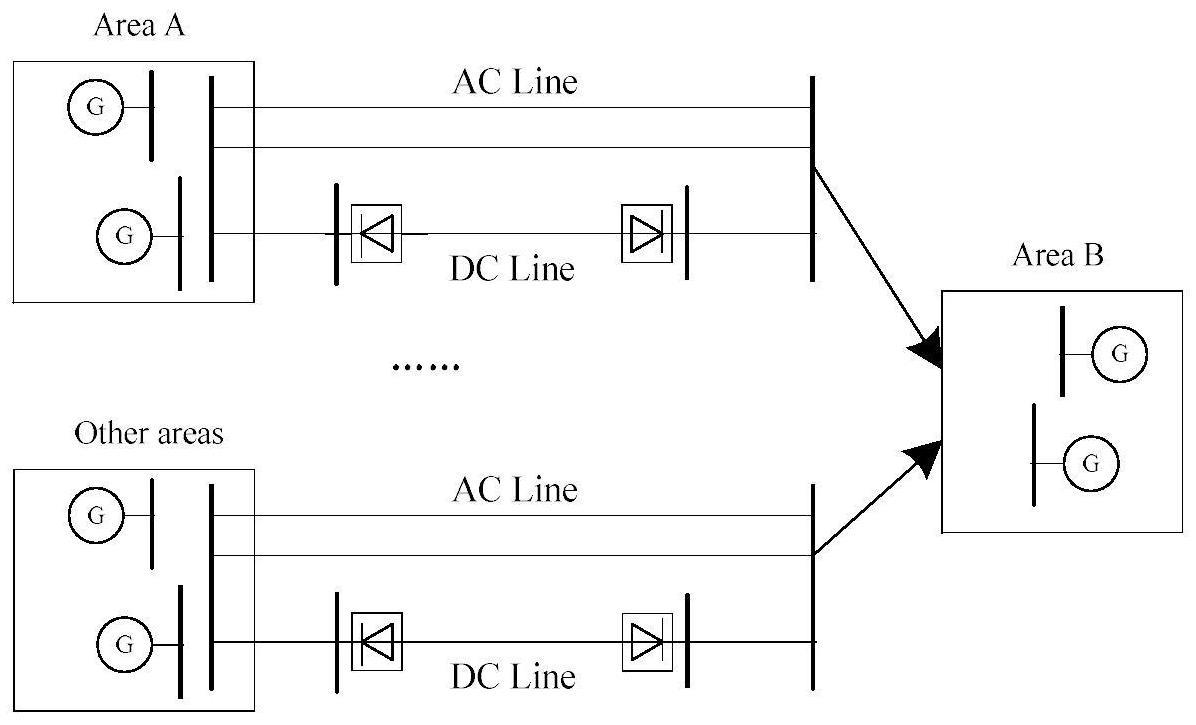
8、以某条直流系统为研究对象,送端为区域a,受端为区域b,交流系统的动态方程为:
9、
10、其中,δcoi,ab和ωcoi,ab分别为a、b两区域的coi转子角之差和角频率差;ωs为基准角频率;pma和pmb分别为区域a和b的发电机机械功率输入,pla和plb分别为区域a和b的本地负荷,ptb为从其他区域向区域b传输的有功功率,pac和pdc分别是交流线路和直流线路的传输功率,mta和mtb分别区域a和区域b发电机的coi惯量常数,θ为coi坐标系下的等效阻尼系数;
11、直流控制环节包括直流电流控制环节、附加直流调制环节及低压限流环节,分别如下式所示:
12、
13、其中,pdcref为直流传输功率的参考值,△p0为直流功率调制信号,td为直流系统的等效一阶时间常数,为低压限流环节起作用后的功率限定值;
14、取状态变量x(t)为x(t)=[x1(t),x2(t),x3(t)]t=[δcoi,ab,ωcoi,ab,pdc]t和控制输入u=pdcref+△p0,取相对转子角度的增值作为状态方程的输出,得到混联系统状态方程为:
15、
16、其中,
17、
18、式中,δ120为系统处于稳态时的转子角度值,x(t)为状态矢量,y(t)为系统输出,u(t)为控制输入;
19、上式中的f(x(t))定义为:
20、
21、其中,
22、
23、定义标准坐标系为:
24、
25、由上式可知,该坐标系下系统的平衡点为原点,进一步可以将混联系统状态方程(3)转化为:
26、
27、其中,
28、
29、标准坐标系中的χ1、χ2、χ3为系统状态,f2、f3、σ均为常数,系数g3为已知正常数,θ为未知常数,u为具有饱和特性的控制输入,且满足如下关系:
30、
31、其中,v为待设计理想控制输入,vmin和vmax分别表示理想控制输入v的最小值和最大值,umin和umax表示控制输入u的最小值和最大值。
32、优选地,步骤s2所述对步骤s1所建立的多馈入交直流混联系统饱和切换模型进行连续性转换,得到多馈入交直流混联系统饱和切换连续模型,包括:
33、采用光滑的函数h(v)进行逼近处理,得到连续性拟合函数h(v):
34、h(v)=vh tanh(v-vx)+vx (8)
35、其中,
36、
37、定义u(v)与h(v)的误差如下:
38、δ(v)=u(v)-h(v) (10)
39、其中,δ(v)为有界量,且满足|δ(v)|≤vh(1-tanh(1))=bδ;
40、结合公式(8)、(9),由均值定理可知:
41、
42、其中,vμ=μv+(1-μ)v0,且0<μ<1,v0为常数;
43、设计v0=0,则公式(11)可整理为:
44、
45、考虑(10)、(12)代入公式(6)、(7),得到多馈入交直流混联系统饱和切换连续模型:
46、
47、其中,f3′=χ3f3+σ+g3h(0),
48、优选地,步骤s3所述基于步骤s2所建立的多馈入交直流混联系统饱和切换连续模型,并利用混联系统的lyapunov函数,对多馈入交直流混联系统稳定控制,包括:
49、定义跟踪误差如下:
50、
51、其中,e1、e2和e3为跟踪误差,χ1d、χ2d和χ3d为状态量χ1、χ2和χ3的期望值,χ2d、χ3d为如下虚拟控制律:
52、
53、式中,k1、k2和kθ为控制参数,为针对未知常数θ的估计值;
54、混联系统的lyapunov函数v1为:
55、
56、其中,表示对未知常数θ的估计误差;
57、将公式(13)-(15)代入公式(16),lyapunov函数v1的导数为:
58、
59、设计lyapunov函数v2为:
60、
61、并将理想控制律v设计为:
62、
63、其中,ε3为正设计常数,n(·)表示nussbaum函数;
64、将公式(13)-(15)、(19)代入公式(18)中,则lyapunov函数v2的导数为:
65、
66、进一步由公式(17)和公式(20)可得:
67、
68、其中,
69、在以上不等式(21)两边同乘以eκt,并在[0,t]上进行积分,可得:
70、
71、优选地,步骤s3所述对多馈入交直流混联系统稳定控制,还包括:
72、将设计的理想控制律v代入步骤s2连续性拟合函数h(v)中,得到实际的控制输入u。
73、本发明具有以下有益效果:
74、1、本发明提出了一种基于饱和切换模型的多馈入交直流混联系统稳定控制方法,区别于常规多馈入交直流混联系统稳定控制方法,建立了交直流混联系统不同控制策略下的饱和切换模型,能够有效反映不同控制策略之间的切换过程,保证故障时发生控制策略的切换后,直流系统的稳定运行能力,有效改善了直流输电系统的稳定运行特性。
75、3、本发明切换过程包括直流电流控制环节、附加直流调制环节及低压限流环节之间的转换过程,而且模型中的饱和切换项,采用光滑反正切三角函数进行逼近处理,从而将不连续切换项转换为连续函数,有效处理带有饱和特性的控制输入,并利用李雅普诺夫能量法lyapunov证明了系统的稳定能力。当直流采用所述控制时,故障后系统的恢复过程具有较好的暂态响应,超调和振荡都能得到迅速抑制,验证了本发明基于饱和切换模型的多馈入交直流混联系统稳定控制方法的有效性。
- 还没有人留言评论。精彩留言会获得点赞!