一种液压电机驱动控制器死区补偿方法及系统与流程
本发明属于电机控制,具体涉及一种液压电机驱动控制器死区补偿方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、电机控制器使用pwm方式输出电压控制电机电流,为了避免上、下桥臂开关管直通,常常加入死区。然而死区对于输出电压造成谐波畸变,进而影响电流波形与转矩脉动。
3、例如,电机矢量控制逆变器主电路通常采用三相桥式电路,开关器件采用igbt,由于同一桥臂igbt存在开通和关断延迟,为保证逆变器正常工作,避免同一桥臂正负母线电压直通,同一桥臂的上下igbt须建立一个死区,通过这种方式虽然实现了功率器件的可靠运行,但是也带来死区效应.死区效应产生通常由在含有开关器件igbt的逆变电路中,必须保证在逆变器开通某一桥臂的同时,与之互补的另一桥臂处于关断状态,否则会因桥臂直通发生短路。但开关器件本身的开通时间要快于关断时间,为保证系统的安全,需要在pwm开通信号之前插入一段死区,死区的引入会造成逆变器输出电流信号发生失真。由于死区效应,导致输出发生非标准化,畸变化,影响感应电机的控制精确度。
4、基于此,在对dq轴电流环进行设计时,需要知道设备(plant)的等效电阻和电感值,由于一部分电机的电阻和电感值很小,而考虑到死区电阻后设备的等效电阻和电感值往往相对误差较大;而且死区电阻是一个随电流非线性变化的值,即使有死区补偿,也很难完全消除它;如果设备的等效电阻和电感值找不准,势必会影响所设计电流环的性能。因此有必要分析一下它们对电流环的影响。
5、而由于设备值都是实际值,无法准确得到,传统的通过自动整定(auto-tuning)算法得到的设备值也很难与实际的设备值相等,死区电阻是一个随电流非线性变化的值,即使有死区补偿,也很难完全消除它,将造成电流环设计时的零极点严重不能对消,也就使得液压电机驱动控制器的死区电阻无法被精准的辨识和补偿,从而影响到电流环的性能。
技术实现思路
1、为了解决上述问题,本发明提出了一种液压电机驱动控制器死区补偿方法及系统,本发明通过构造一个预先确定的电阻值,增大总的等效电路电阻值,从而降低不确定电阻(如死区电阻)在总的电阻值中的比重,最大程度上保证了零极点的准确对消。
2、根据一些实施例,本发明的第一方案提供了一种液压电机驱动控制器死区补偿方法,采用如下技术方案:
3、一种液压电机驱动控制器死区补偿方法,包括:
4、构造一个预先确定电阻值的电阻作为有源电阻;
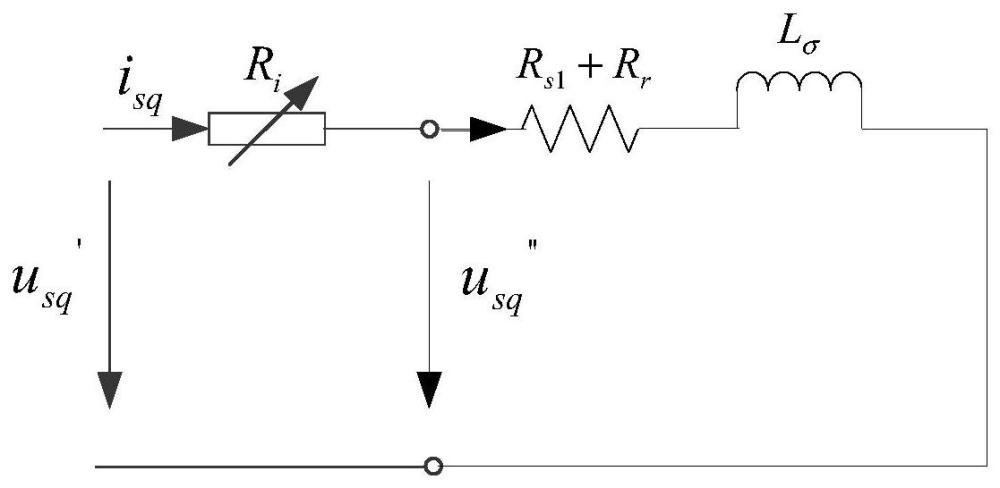
5、通过将有源电阻加入到液压电机驱动控制器的电流环结构中,增大原始总等效电路电阻值,得到液压电机驱动器的总等效电阻值;
6、根据液压电机驱动器的总等效电阻值,降低死区电阻在总等效电阻值的比重,完成液压电机驱动控制器的死区补偿。
7、根据一些实施例,本发明的第二方案提供了一种液压电机驱动控制器死区补偿系统,采用如下技术方案:
8、一种液压电机驱动控制器死区补偿系统,包括:
9、预先构造电阻模块,被配置为构造一个预先确定电阻值的电阻作为有源电阻;
10、总等效电阻确定模块,被配置为通过将有源电阻加入到液压电机驱动控制器的电流环结构中,增大原始总等效电路电阻值,得到液压电机驱动器的总等效电阻值;
11、死区补偿模块,被配置为根据液压电机驱动器的总等效电阻值,降低死区电阻在总等效电阻值的比重,完成液压电机驱动控制器的死区补偿。
12、根据一些实施例,本发明的第三方案提供了一种计算机可读存储介质。
13、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一个方面所述的一种液压电机驱动控制器死区补偿方法中的步骤。
14、根据一些实施例,本发明的第四方案提供了一种计算机设备。
15、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的一种液压电机驱动控制器死区补偿方法中的步骤。
16、与现有技术相比,本发明的有益效果为:
17、本发明通过构造一个预先确定的电阻值,增大总的等效电路电阻值,从而降低不确定电阻(如死区电阻)在总的电阻值中的比重,最大程度上保证了零极点的准确对消,可以从一定程度上改善电流环的控制性能,特别在电机驱动器低频阶段,改善电流环对速度环的影响。
技术特征:
1.一种液压电机驱动控制器死区补偿方法,其特征在于,包括:
2.如权利要求1所述的一种液压电机驱动控制器死区补偿方法,其特征在于,所述构造一个预先确定电阻值的电阻作为有源电阻,包括:
3.如权利要求2所述的一种液压电机驱动控制器死区补偿方法,其特征在于,所述构造一个预先确定电阻值的电阻作为有源电阻,还包括:
4.如权利要求1所述的一种液压电机驱动控制器死区补偿方法,其特征在于,所述液压电机驱动器的总等效电阻值为:
5.如权利要求1所述的一种液压电机驱动控制器死区补偿方法,其特征在于,所述有源电阻取值的限定条件是:
6.如权利要求1所述的一种液压电机驱动控制器死区补偿方法,其特征在于,还包括:
7.如权利要求6所述的一种液压电机驱动控制器死区补偿方法,其特征在于,所述电流环控制参数,具体为:
8.一种液压电机驱动控制器死区补偿系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的一种液压电机驱动控制器死区补偿方法中的步骤。
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一项所述的一种液压电机驱动控制器死区补偿方法中的步骤。
技术总结
本发明属于电机控制领域,提供了一种液压电机驱动控制器死区补偿方法及系统,包括构造一个预先确定电阻值的电阻作为有源电阻;通过将有源电阻加入到液压电机驱动控制器的电流环结构中,增大原始总等效电路电阻值,得到液压电机驱动器的总等效电阻值;根据液压电机驱动器的总等效电阻值,降低死区电阻在总等效电阻值的比重,完成液压电机驱动控制器的死区补偿。本发明通过构造一个预先确定的电阻值,增大总的等效电路电阻值,从而降低不确定电阻(如死区电阻)在总的电阻值中的比重,最大程度上保证了零极点的准确对消。
技术研发人员:张志坚,韦学中,禹东方,张丙胜,李本堂,梁孝森,鲁超,王广羽
受保护的技术使用者:泰安航天特种车有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!