基于EKO的双三相PMSM无模型预测电流控制方法
本发明涉及多相电机控制,尤其涉及一种基于eko的双三相pmsm无模型预测电流控制方法。
背景技术:
1、进入21世纪以来,高性能半导体功率器件的出现和高性能永磁材料的出现,为永磁同步电机pmsm在工业领域的应用奠定了坚实的基础。永磁同步电机相较于感应电机在功率密度和机械效率方面具有优势。其中,相较于三相电机而言,双三相pmsm在转矩脉动、系统稳定性、功率密度等方面更具有优势。因此,双三相pmsm在电动汽车、航空航天、风力发电等领域的使用越来越多。多相系统的谐波电流会导致较大的铜损耗,降低整个系统的效率。学者们从不同的技术层面解决了这个问题。基于foc的pi-svpwm算法是一种比较成熟的三相驱动开发技术。随着多相电机的发展,pi-svpwm算法已经从三相电机驱动扩展到多相电机驱动系统。与foc控制相比,直接转矩控制结构更简单、鲁棒性更好。
2、近10年,模型预测控制mpc技术快速发展,mpc的概念简单、瞬态响应快且易实现多目标优化。mpc技术可以分为引入调制技术的连续集模型预测控制和产生有限个电压矢量的有限集模型预测控制。模型预测技术可以分为模型预测转矩控制和模型预测电流mpcc控制,mpcc方法成功的应用于多相驱动系统中,但mpcc还是具有自身固有的缺点:谐波电流大、变开关频率和繁重的计算负担。mpc方法对于电机参数的依懒性是非常高的,且电机系统的参数会随着电机温度和机械振动等外部因素而随之变化,此外,逆变器的死区设置、母线电压的波动等都会影响准确模型的建立。
3、无模型预测方法近五年快速发展,因为其具有适应多样系统,不依赖参数,鲁棒性强的特点。目前对于双三相pmsm无模型预测控制方法的研究较多,但是对于传统无模型预测方法而言,存在一些局限性。例如,对于传感器的精度要求较高且对于代数法分析法估计的误差很大。为了解决这一问题,研究员们引入观测器来对于超局部模型中非线性部分进行估计,这类观测器包括:扩展观测器、滑模观测器等,但是上述观测器增益都为固定值。与之不同的是,卡尔曼观测器eko以最小方差为准则,是可以自适应的调整增益系数矩阵,对于超局部模型中非线性部分进行最优估计,提高控制性能;对于调制部分而言,传统无模型预测方法在一个采样周期采用一个有效矢量和零矢量相结合的方法,对于电压调制范围是有限的。
技术实现思路
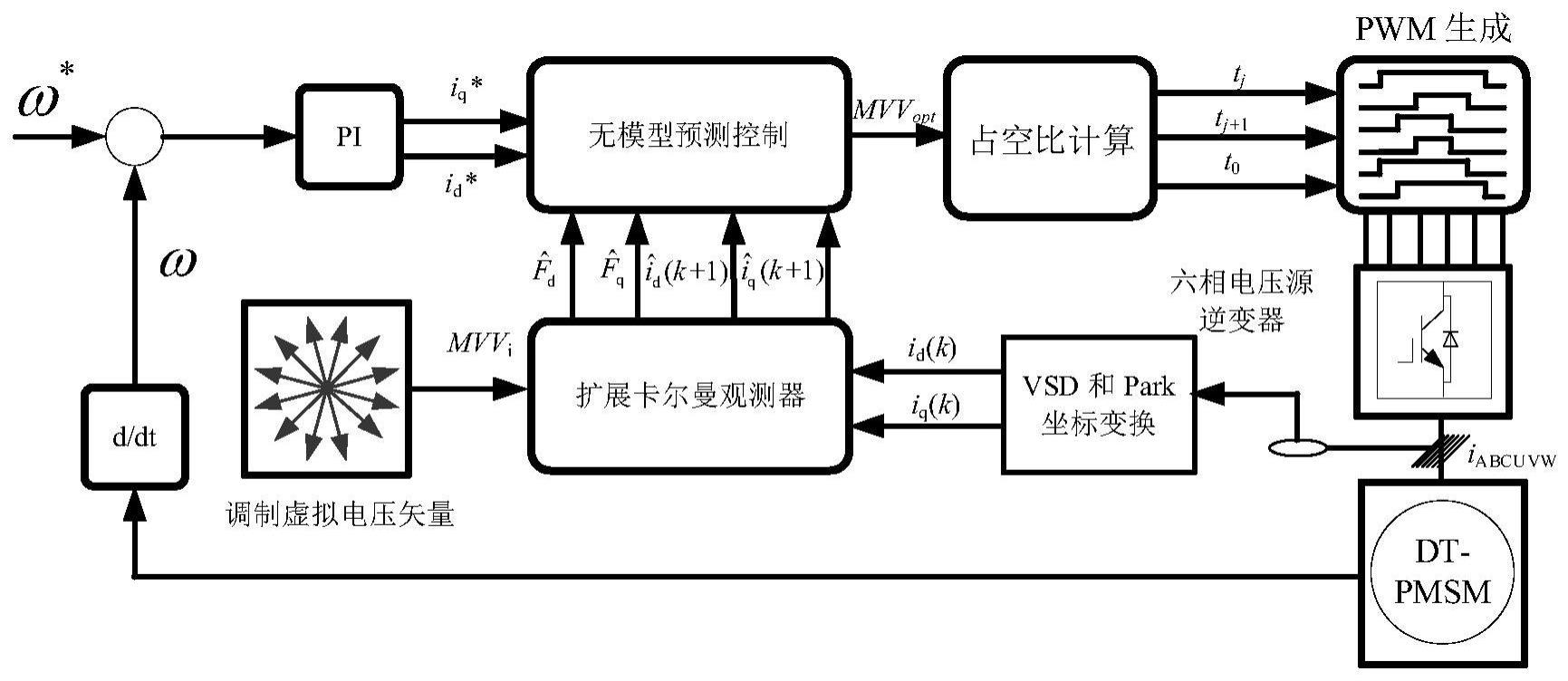
1、针对现有技术的不足,本发明提供一种基于eko的双三相pmsm无模型预测电流控制方法,该方法提升了系统在参数失配情况下的鲁棒性,提高了超局部模型的精度,增大了调制范围,减少了控制误差,降低了在软件上的实现难度,更容易在低成本的微处理器上实现。
2、基于eko的双三相pmsm无模型预测电流控制方法,包括以下步骤:
3、步骤1:建立双三相电机的数学模型;
4、建立双三相永磁同步电机在d-q轴下的数学模型,如下所示:
5、
6、建立双三相永磁同步电机在x-y轴下的数学模型,如下所示:
7、
8、其中,ud和uq是d和q轴上的电压,id和iq是d和q轴上的电流,ux和uy是x和y轴上的电压,ix和iy是x和y轴上的电流,rs是定子电阻,ωr是电角速度,ls为电感,lls代表漏感,ψf代表永磁体磁链,d/dt为微分因子。
9、步骤2:进行虚拟电压矢量的合成;
10、将α-β子空间中幅值为0.64udc的基本电压矢量定义为l1组,udc为母线电压,即(v64、v44、v45、v55、v51、v11、v13、v33、v32、v22、v26、v66),将幅值为0.47udc的基本电压矢量定义为l2组,即(v46、v65、v54、v41、v15、v53、v31、v24、v15、v36、v54、v12);同方向上的l1组和l2组的两个电压矢量在α-β子空间中方向相同,而在x-y子空间中方向相反,从同方向上的l1组和l2组中各取一个基本电压矢量来合成虚拟电压矢量,其中,将l1组中选取电压矢量称为vm;将l2组中电压矢量称为vn;两个基本电压矢量按照一定的占空比作用,使得在x-y平面上平均值等于零,因此,vm和vn合成的虚拟电压矢量计算如下:
11、
12、η1为的vn占空比,η2为vm的占空比;
13、步骤3:提出基于在线合成的调制虚拟电压矢量;
14、每一个调制虚拟电压矢量都是由所在扇区的两端虚拟电压矢量,即相邻两个虚拟电压矢量和零矢量合成;调制虚拟电压矢量被命名编号为mvv1-mvv12,调制虚拟电压矢量mvvj的合成表达为:
15、mvvj=djvvj+dj+1vv(j+1)+d0 v0 (4)
16、
17、其中,dj、dj+1和d0分别代表第一虚拟电压矢量、第二虚拟电压矢量和零矢量的占空比;其中,vvj、vv(j+1)、v0分别为第一虚拟电压矢量、第二虚拟电压矢量、零矢量,第一虚拟电压矢量表示每个扇区边端编号较小的虚拟电压矢量,第二虚拟电压矢量表示与第一虚拟电压矢量同一扇区内编号较大的虚拟电压矢量;
18、步骤4:建立电机参数失配的pmsm数学模型和超局部模型;
19、由于虚拟电压矢量在x-y平面上的平均值为零,可以不考虑电机在x-y平面上的数学模型,只考虑在d-q轴上的数学模型,pmsm数学模型中,电压方程具体表示为:
20、
21、其中,δrs、δls、δψf分别为定子电阻、电感和永磁体磁链的失配度,λd、λq分别为未知的干扰项,对式(6)进行改写,得到对于电流的动态方程为:
22、
23、通过上式的计算,电机的超局部模型表示为:
24、
25、其中,ξ=1/ls,线性干扰项fd、fq具体表示为:
26、
27、采用一阶欧拉法对于上式(9)进行欧拉化处理,得到离散系统超局部模型:
28、is(k+1)=is(k)+ts(ξu(k)+g(k)) (10)
29、式中,ts为采样周期;其中,
30、
31、其中,id(k)和iq(k)分别为d轴和q轴在k时刻的电流;ud(k)和uq(k)分别为d轴和q轴在k时刻施加的电压;fd(k)和fq(k)分别为d轴和q轴在k时刻的线性干扰项。
32、步骤5:设计价值函数并选择调制虚拟电压矢量中最优电压矢量;
33、所述价值函数具体为:
34、
35、其中,id*(k)和iq*(k)分别为d轴和q轴电流的给定值;id(k+1)和iq(k+1)分别为d轴和q轴上k+1时刻的电流预测估计值;
36、利用公式(12)的价值函数来筛选出12个调制虚拟电压矢量中最优电压矢量,其中最优电压矢量指具有最小价值函数的调制虚拟电压矢量;
37、步骤6:计算各调制虚拟电压矢量的占空比。
38、为了使d轴和q轴电流无误差地跟踪到参考值,利用无差拍电流控制原理来计算各个调制虚拟电压矢量的作用时间,如下式所示:
39、
40、其中,ts为采样周期,id*和iq*分别为d轴和q轴的参考电流;dj、dj+1和d0分别为第一虚拟电压矢量、第二虚拟电压矢量和零矢量的作用时间;和分别为第一虚拟电压矢量、第二虚拟电压矢量和零矢量作用时d、q轴上的电流斜率,通过式(10)离散系统超局部模型来求得各矢量的电流斜率为:
41、
42、其中,vvjz、vv(j+1)z、v0z分别为d、q轴的第一虚拟电压矢量、第二虚拟电压矢量、零矢量,z=d或z=q,分别代表d、q轴;
43、计算矢量的作用时间,联立方程求解出各个矢量的作用时间:
44、
45、
46、
47、其中,
48、
49、t0=ts-tj-tj+1 (19)
50、当tj和tj+1大于ts时,需要保证施加电压的有效性,对tj和tj+1进行修正:
51、
52、步骤7:设计基于离散系统超局部模型的扩展卡尔曼观测器;
53、将线性干扰项fd、fq定义为扩展状态变量,基于离散系统超局部模型设计的扩展卡尔曼观测器状态方程如下:
54、
55、其中,
56、
57、其中,i2×2为2阶单位矩阵;o2×2为2阶单位零矩阵。
58、采用一阶欧拉公式对于式(22)进行离散化处理,得到如下离散方程:
59、
60、其中,i4×4为4阶单位矩阵;
61、相关雅克比矩阵计算为:
62、
63、
64、其中上标~为预测值,上标^代表估计值;
65、将扩展卡尔曼观测器分为预测阶段和更新阶段,其中预测阶段包括两部分,具体为:
66、(1)对状态变量进行预测,利用输出和上一时刻的状态估计来预测下一时刻的状态变量应为:
67、
68、(2)计算误差协方差矩阵p(k):
69、
70、其中,q表示过程性能噪声协方差矩阵;
71、更新阶段包括三部分,具体为:
72、(1)计算增益矩阵k(k):
73、
74、其中,r表示测量噪声协方差矩阵,h(k)=[i2×2o2×2]。
75、(2)计算最优估计值
76、
77、其中,y(k)为预测量对应的输出值。
78、(3)更新误差协方差矩阵,用于计算下一次误差协方差矩阵:
79、
80、步骤8:进行开关序列及数字实现;
81、在dsp的增减模式下,寄存器cmpa和cmpb在开关周期的ts/2进行更新,即参考值调制波发生变化,来实现产生不对称pwm信号,利用三角载波与四个参考值调制波进行比较,六相中的每一相对应一个或者两个参考值调制波,当参考值调制波与三角载波值第一次相等的时候,开关信号由低电平跳变至高电平;当参考值调制波与三角载波值第二次相等的时候,开关信号由高电平跳变至低电平,实现了不对称的pwm信号。
82、采用上述技术方案所产生的有益效果在于:
83、本发明提出一种基于eko的双三相pmsm无模型预测电流控制方法。提升了系统在参数失配情况下的鲁棒性。提高了超局部模型的精度,并引入调制虚拟电压矢量,利用无差拍原理,在一个采样周期中利用了两个相邻的虚拟电压矢量和一个零矢量,增大了调制范围,减少了控制误差。提出三角波作为载波的方式来生成不对称的pwm波,参考值调制波在ts/2的处进行更新,降低了在软件上的实现难度,更容易在低成本的微处理器上实现。
- 还没有人留言评论。精彩留言会获得点赞!