一种基于阶数模型和隐式最优规律的电机位置控制方法
本发明涉及一种电机位置控制方法。
背景技术:
1、电机位置伺服控制起着非常重要的作用,从工业制造到精准农业,从卫星光学扫描到日常生活中电梯的平层控制。高性能位置伺服所涉及的电机常包括永磁同步电机、直流伺服电机、音圈电机、空心杯电机等,其基本原理基本一致:在电枢上加电压以产生电流,电流与转矩/力成正比,驱动负载进行旋转和直线运动,传统位置伺服控制方法在控制上构建电流环、速度环和位置环等控制结构最终实现电机位置的控制。对于电机位置控制,实现最优控制性能非常有吸引力。例如,在工业及制造领域,实现最优控制性可以最大限度地提高制造效率。
2、然而,现有的位置伺服控制算法无法达到最优控制性能,并且现有方法只关注单个方面的相对性能改进,并不能够实现绝对的位置伺服最优控制性能。例如,常用的三闭环pid位置控制结构是线性的和误差驱动的,当误差小时控制量小,这会降低动态性能,离最优性能比较远。对于其他控制策略,如自适应控制、重复控制、反步控制、滑模控制、h∞控制、模型参考控制等;例如:
3、1、f.xie,c.m.qiu,和z.qian于2022年公开的《optimal speed-torque controlof asynchronous motor for electric cars in the field-weakening region basedon voltage vector optimization》;
4、2、e.csencsics,m.thier,r.hainisch,g.schitter于2018年公开的《system andcontrol design of a voice coil actuated mechanically decoupling two-bodyvibration isolation system》;
5、3、s.y.chenc.y.lee于2017年公开的《digital signal processor basedintelligent fractional-order sliding-mode control for a linear voice coilactuator》;
6、这些文献所追求控制的自适应性或鲁棒性比快速性响应更优先,因此并不能达到最优控制效果。
7、在现有方法中,能在实际条件下实现一定程度的最优控制算法有模型预测/参考控制(mpc),但是这种算法只能执行有限枚举,并在有限枚举的集合中选择了相对最优解。然而,得到的最优解仅仅是枚举范围内的局部最优解,而不是全局最优。该方法还有依赖于模型和计算量大的特点。
8、传统的最优控制在理论上可以获得全局最优的效果。该理论主要由列夫·庞特里亚金和理查德·贝尔曼在1950年代提出,并已应用于航天器的最小能量着陆问题。然而,由于模型敏感性、离散控制问题、时变等问题,该理论无法在电机实时控制中实现最优控制效果,限制因素主要包括模型敏感性、离散控制、未知扰动影响三方面,论述如下:
9、首先,传统最优控制的理想效果是基于精确模型计算得出,对精确模型的依赖严重制约了最优控制在实际条件下的应用:一方面,电机位置控制包括许多无法通过精确模型精确建模的因素,例如逆变器死区时间、磁饱和、漏磁通、端绕组效应、热电耦合等影响因素引起的影响。另一方面,最优解是一种极限/极端,以至于即使是内部参数或外部条件的微小差异也可能导致巨大的差异、严重的振荡甚至不稳定。
10、其次,传统的最优控制是针对连续系统建立的,而不是针对离散控制的。传统最优控制给出的控制量仅有三种可能:正最大、负最大和零。对于离散控制,例如mcu(微控制器)的电机控制应用,可能会出现明显的颤振(振荡)甚至不稳定。文献中已经针对振荡问题进行了各种改进,例如提高采样频率,使用更平滑的饱和函数代替符号函数,平滑算法,与其他控制器组合,分段线性化等,但是,这样的改进并不能完全消除颤振,这些措施也会导致“最优”特性的丧失。离散最优控制律与连续系统完全不同,韩京清教授[16]推导了二阶串联积分对象的离散最优控制律“fhan”该函数包括多种类型的非线性数学运算,如根式、符号、绝对值和平方,远比连续系统的最优控制规律更复杂。对于电机位置控制这样比二阶串联积分对象更为复杂的系统,其离散最优控制律比“fhan”更复杂,难以得到显式的表达式。
11、第三,传统最优控制只有在所有信息都已知的情况下才能求出最优解。不能解决时变量或变条件的问题。在电机位置控制中,由于无法预先知道电机负载转矩,难以提前获得最优控制规律以实现实时控制。
技术实现思路
1、本发明是为了解决传统电机位置伺服最优控制方法由于模型灵敏度、离散控制、时变元素、未知扰动的因素影响导致难以在实际条件下实现最优控制效果的问题,从而提供一种基于阶数模型和隐式最优规律的电机位置控制方法。
2、本发明采用的技术方案:
3、一种基于阶数模型和隐式最优控制规律下电机位置伺服控制方法,其特征是:它包括以下步骤:
4、步骤一、采集电机实际位置θ与电枢电流ia,建立电机阶数模型;所述电机阶数模型为:
5、
6、式中,
7、u是阶数模型的输入,对应实际电机的电枢电压,单位是:v;
8、b0表示电机输入输出之间总惯性与正向增益的合成项,且b0无需与电机参数精确匹配;kt表示电机的转矩系数,单位是:nm/a;
9、j表示电机转动惯量,单位是:kg·m2;
10、la表示电机电枢电感,单位是:mh;
11、和是阶数模型的状态量;
12、y是阶数模型的输出,对应电机实际位置θ,单位是:rad;
13、doverall是阶数模型的总扰动,对应电机已知动态及未知动态的总和;
14、步骤二、使用扩张状态观测器观测步骤一所述的阶数模型的总扰动doverall,并对阶数模型进行补偿,补偿后获得简化阶数模型,所述简化阶数模型为:
15、
16、步骤三、利用神经网络学习步骤二所述简化阶数模型的离散最优控制数据,通过神经网络隐式获得数据中隐含的离散最优控制规律;
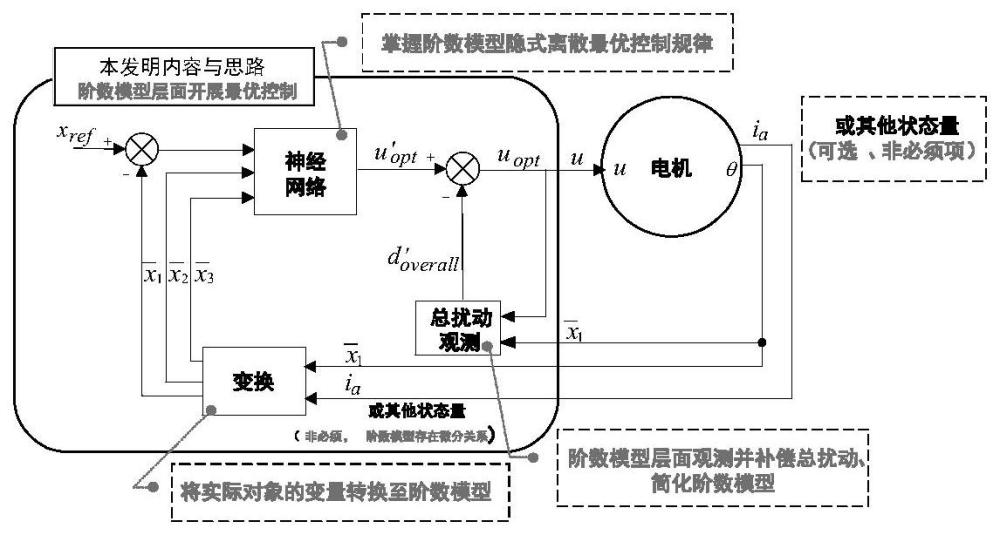
17、步骤四、根据步骤二获得的简化阶数模型和步骤三获得的所述简化阶数模型的离散最优控制规律构建最优控制框架并实施最优控制,具体为:
18、首先采集电机实际信息,并变换后得到阶数模型变量和进而将位置给定xref与相减得到位置控制误差,并将所述位置控制误差与和同时输入到神经网络,然后通过步骤三获得的所述简化阶数模型的离散最优控制规律获得输出电压u′opt、然后在输出电压u′opt中减去扰动对应的部分d′overall,得到进行总扰动补偿后的最终输出电压uopt,其中最后将所述最终输出电压uopt通过驱动器输出给电机以实现对实际电机的最优控制,完成基于阶数模型和隐式最优控制规律的电机位置控制。
19、步骤一和步骤四中的阶数模型的状态量:和是通过如下公式获得的:
20、
21、式中,
22、kv是电机的摩擦系数,单位是:nm·s/rad;
23、ia是电机的电枢电流,单位是:a。
24、步骤二中,观测过程使用已知模型的动态信息进行总扰动观测,具体如下:
25、首先,建立如下扩张状态观测器对总扰动doverall进行观测,获得观测值z4;
26、
27、其中,z1,z2,z3分别是阶数模型变量的观测值,f是已知模型参数所对应的阶数模型动态,z4是未知扰动的观测值,β1,β2,β3,β4是观测器系数,总扰动doverall的观测值为ra是电机电枢电阻,单位是:ω,所述观测值为满足如下关系:
28、
29、步骤二中,观测过程可以不使用已知模型的动态信息进行总扰动观测,具体如下:
30、首先,建立如下扩张状态观测器对总扰动doverall进行观测,获得观测值z4;
31、
32、其中,z1,z2,z3分别是阶数模型变量的观测值,z4是未知扰动的观测值,β1、β2、β3和β4是观测器系数,总扰动doverall的观测值为满足如下关系:
33、
34、所述已知模型的动态信息f除了前述表达形式,还可以选取为包括ftotal如下表达式中的全部或部分元素:
35、
36、其中:tl是电机的转矩,单位是:nm;
37、步骤三中,利用神经网络获得步骤二所述简化阶数模型的离散最优控制规律的具体方法是:
38、步骤三一、获取步骤二所述简化阶数模型的离散最优控制数据,通过优化建模求解的方法获得相关数据,对应问题的优化建模如下:
39、
40、
41、式中,
42、h是离散时间步长,单位是:s;
43、是初始值,i=1,2,3,…;
44、u[0]是控制量初始值;
45、obj是优化目标,代表位置跟踪质量;
46、m是离散数据的最大下标;
47、i是数据下标;
48、xref是位置给定,单位是:rad;
49、kd是用于优化求解的阻尼系数,用于防止优化求解结果的超调与振荡;
50、udc是电机驱动器供电的母线电压,单位是:v;
51、步骤三二、对步骤三一所述对应优化问题求解,获得给定量xref下各状态量与控制量u的离散数据序列;
52、步骤三三、通过神经网络学习步骤三三获得的所述离散数据序列中隐含的控制规律,输入数据组合,取:输出数据选用控制量u,进行神经网络的数据学习训练,学习后的神经网络能够获得所述简化后阶数模型输入输出之间的隐式最优控制规律。
53、其中神经网络的具体参数为,神经网络为bp神经网络,隐含层层数为2层,神经网络的传递函数为tansig。
54、本发明取得的突出的实质性特点和显著进步:本发明打破传统基于精确模型思维方式,将电机理解为相同输入输出但是抽象层级更高更简化的阶数模型,通过在阶数模型层面掌握固定的最优控制规律实现阶数模型层面的最优控制,破解传统最优控制需要知道所有模型具体信息并受模型不确定性影响大的难题。真实对象与阶数模型具备“一体两面”的关联性,在更为抽象和简化阶数模型层面实现最优控制同时也是真实层面的最优控制效果。
- 还没有人留言评论。精彩留言会获得点赞!