PMSM三电平NPC逆变器的无差拍预测电压控制方法
本发明涉及一种永磁同步电机三电平npc逆变器的无差拍预测电压控制方法,具体适用于利用滑膜控制预测电机未来状态实现电机高性能高精度控制要求。
背景技术:
1、pmsm即永磁同步电机,pmsm作为交流电机中最具代表的一类,具有结构简单、高转矩惯性比、体积小、效率高等诸多优点,在精密控制、机车牵引等领域应用前景广阔。就控制方式而言,基于 pi 调节器的转子磁链定向矢量控制(foc)应用极为广泛,其关键在于定子电流幅值和空间位置的控制,分别对转速和定子交、直轴电流进行双闭环控制,系统稳态性能好。然而pi 调节器的参数选择依赖于电机数学模型,由于pmsm 是一个强耦合的非线性系统,电机电阻 r、电感 l 及磁链等参数变化对系统稳态性能影响较大,因此 pi 控制不能直接满足电机高性能、高精度控制要求。
2、pmsm 模型预测控制的核心思想是根据逆变器和电机的数学模型,以及电机当前时刻的状态,预测未来时刻的状态,与给定值进行比较,选择出最优的电压矢量作用于电机。相对于 pi 调节器,模型预测控制省去了复杂的参数整定,具有更好的稳态性能。与 pi调节器相同,电机模型不准确或模型参数偏差会导致控制电压矢量的选取不准确,导致系统输出电流产生偏差,随着时间推移,系统累计偏差持续增大,从而恶化系统的控制性能。
3、滑模控制作为对参数和外部干扰不敏感的强鲁棒控制,近年来一直是 pmsm 的研究热点。但仍然存在不足:
4、1、有采用一种高阶滑模观测器,利用观测器输出的 n阶微分实现对电机磁通和电阻的观测,但多次微分极易形成高次谐波,难以完全保证观测结果的准确性;
5、2、有利用d轴和q轴的电流、电压偏差构建参数辨识模型,设计合适的控制率,保证观测参数的收敛性;
6、3、有提出一种基于快速傅里叶变换电机参数离线辨识方法,采用定子电压和电流的基波离线辨识定子d轴和q轴电感,但该方法获取的数据无法适应电机的不同工况;
7、4、有采用扩展卡尔曼滤波器对磁链和电感 l进行在线辨识,实现最小方均误差意义下的系统最优估计。
技术实现思路
1、本发明的目的是克服现有技术中存在的内外部扰动影响观测的问题,提供了一种有效抑制扰动的永磁同步电机三电平npc逆变器的无差拍预测电压控制方法。
2、为实现以上目的,本发明的技术解决方案是:
3、一种pmsm三电平npc逆变器的无差拍预测电压控制方法,所述无差拍预测电压控制方法用于控制永磁同步电机的npc结构三电平逆变器;
4、所述无差拍预测电压控制方法包括如下步骤:
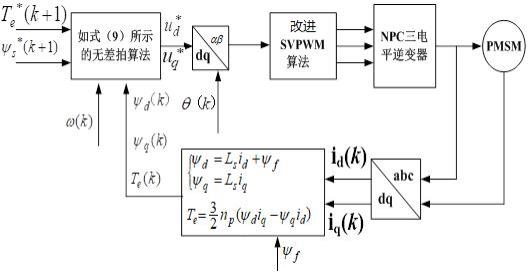
5、第一步:建立永磁同步电机无差拍预测电压控制数学模型;利用给定转速和反馈转速的差值,通过pi调节器及最大转矩电流比控制算法,预测出d轴、q轴参考电压矢量与;
6、第二步:构建一种基于隐去中矢量的目标磁链简化svpwm无差拍控制器模型,对svpwm算法进行改进:以隐去中矢量,利用零矢量、小矢量、大矢量进行调制为原则,将电压空间矢量经过的区域划分为不对称的18扇区,根据目标空间电压矢量落入的扇区位置,得出基本电压矢量的作用顺序,然后确定各开关矢量的作用时间,形成改进的svpwm算法的控制模型,并搭建基于simulink的模型框架;
7、第三步:搭建无差拍转矩磁链结构控制模型;
8、将永磁同步电机无差拍预测电压控制数学模型与隐去中矢量的目标磁链简化svpwm无差拍控制器模型相结合,根据永磁同步电机无差拍预测电压控制数学模型预测的电压矢量在目标磁链简化svpwm无差拍控制器模型中获得相对应的开关控制波形及控制时间,来控制永磁同步电机的三电平npc逆变器的开关通断,从而实现永磁同步电机的控制;此时无差拍转矩磁链结构控制模型搭建完成。
9、所述控制方法还包括:第四步:搭建matlab/simulink仿真平台,验证控制方法的可行性与鲁棒性。
10、所述第一步搭建永磁同步电机无差拍预测电压控制数学模型中,搭建永磁同步电机滑模抗扰动无差拍预测电压矢量控制数学模型及结构模型,永磁同步电机数学模型如式(1)~式(4)所示:
11、;
12、上式中:为定子电压d轴分量,为定子电压q轴分量,为定子电流d轴分量,为定子电流q轴分量,rs为定子绕组相电阻,为转子的角度,为d轴磁链分量,为q轴磁链分量,ls为定子电感,为微分算子,为永磁体磁链,为电磁转矩,为极对数,为折算到轴端的负载扭矩,为机械负载折算到轴端的转动惯量,为转子机械角速度,b为黏滞摩擦系数b>0;
13、将(2)式带入(1)式,消除电机电压方程中电流量并离散化见式(5),式中为开关周期:
14、;
15、上式中:k为当前采样时刻;k+1为与k相邻的下一个采样时刻;
16、将(2)式带入(3)、(4)式,消除电机转矩方程中电流量并离散化见式(6):
17、;
18、上式中:p为微分算子,联立(5)、(6),可得式(7):
19、;
20、上式中:为当前采样时刻转子角速度;取式(7)中,即可实现一个扫描周期内的参考转矩的跟踪;
21、将定子磁链幅值分解到d、q坐标系,可得到定子磁链的幅值计算为式(8):
22、;
23、取式(8)中,为与相邻的下一个采样时刻定子磁链的平方数,即可实现一个扫描周期内的参考磁链的跟踪;
24、联合式(7)、式(8)可得到最终参考电压矢量为式(9):
25、;
26、式中 ;
27、 ;
28、此时永磁同步电机无差拍预测电压控制数学模型搭建完成,利用给定转速和反馈转速的差值,通过pi调节器及最大转矩电流比控制算法,可得到转矩参考值与定子磁链参考值,进而利用公式(9)预测出d轴、q轴参考电压矢量与。
29、所述第二步构建基于隐去中矢量的目标磁链简化svpwm逆变器控制算法中,输入量为当前时刻的电压预测值、,将电压空间矢量经过的区域划分为不对称的18扇区,合成各扇区的空间电压矢量仅涉及小矢量及大矢量;
30、划分输入电压空间矢量大、小扇区,电压空间矢量经过的区域划分为不对称的18扇区,具体划分方法如下:
31、2.1在互相垂直的α、β矢量坐标系内,将α、β矢量坐标系等分为6大扇区,与α轴夹角θ为0~60度的为3号大扇区;与α轴夹角θ为60~120度的为1号大扇区;与α轴夹角θ为120~180度的为5号大扇区;与α轴夹角θ为180~240度的为4号大扇区;与α轴夹角θ为240~300度的为6号大扇区;与α轴夹角θ为300~360度的为2号大扇区;
32、2.2隐去中矢量,利用零矢量、小矢量、大矢量进行调制,根据上述调制方式,则每个扇区内仅需要划分为3个小扇区,划分规律如下;
33、零矢量对应坐标原点,在每个大扇区内完全由小矢量进行调制的区域属于1号小扇区,完全由大矢量进行调制的区域属于2号小扇区,由一个大矢量和一个小矢量协同调制的区域属于3号小扇区;
34、目标电压矢量为vref,目标电压矢量vref与α轴夹角为θ ,根据夹角θ的角度判定电压矢量为vref所在的大扇区的编号,然后将目标电压矢量vref的θ角折算至3号大扇区,得到折算角:
35、;
36、将目标电压矢量vref的大扇区号与小扇区号结合,即可得到目标电压矢量为vref的完整扇区号;
37、2.3整理电压各小扇区逆变器开关顺序,形成开关顺序图表,为减少开关器件的应力,一个逆变器开关周期范围内逆变器先后输出7个对称电压矢量,根据目标空间电压矢量vref落入的扇区号,制定基本电压矢量的作用顺序表;
38、2.4确定各开关矢量的作用时间表,形成svpwm的控制模型;
39、选取大扇区内左侧的矢量vs1、右侧的矢量vs2及零矢量vs0合成目标电压矢量vref,vs1、vs2、vs0矢量作用时间分别对应为t1、t2、t0,则有:
40、;
41、根据不同小扇区的矢量合成规律,分别计算出在各小扇区内的各矢量作用时间,为逆变器直流侧输入电压值,定义中间变量,可计算出t1、t2、t0值为:
42、;
43、联合基本电压矢量的作用顺序表及式(12),解出各扇区基本矢量作用时间,然后根据基本矢量作用时间得出各扇区对应的组合开关控制脉冲情况;
44、由于采取不对称扇区调制,本算法输出包含9种不同类型的脉冲,采用5脉冲输出,定义开关触发变量x、y、z、u、v、w,取:
45、;
46、定义控制器扫描周期为,将各触发变量与周期为、幅值为0.5 的等腰三角载波进行比较,三角载波瞬时值大于触发变量,输出1脉冲;反之输出0脉冲,根据各扇区的开关状态和触发时间,梳理各扇区开关器件触发时间表形成svpwm的控制模型。
47、所述第二步的2.2中小扇区号的判定是根据和的值判定其小扇区编号,判定规则如下:
48、同时满足 ,属于1号小扇区;
49、同时满足,属于2号小扇区;
50、同时满足,属于3号小扇区。
51、所述第三步:搭建无差拍转矩磁链结构控制模型中,模型以电流矢量=0的转子磁链定向矢量控制为基础,系统由转速外环与电流内环组成,转速外环通过滑模控制器提供定子电流q轴分量给定值;、与由滑模抗扰动观测器输出的d、q轴电流的观测值、共同作为电流内环控制器即:无差拍预测电流控制器的输入,输出可获得控制电压vd与vq,将电压变换到α、β静止坐标系后采用改进型svpwm技术控制三电平npc逆变器向电机供电;电流内环以滑模抗扰动观测器为核心,电流互感器测量得到的d、q轴电流实时值id、iq,与转子电角速度共同作为滑模抗扰动观测器输入,输出、作为预测电流控制器输入,其中,转子电角速度由转子位置角θ求导取得;此时无差拍转矩磁链结构控制模型搭建完成。
52、与现有技术相比,本发明的有益效果为:
53、1、本发明一种pmsm机三电平npc逆变器的无差拍预测电压控制方法中不仅可以有效抑制电阻、电感、磁链等参数扰动给系统带来的影响;同时,相比于传统预测电流控制方法,可有效降低逆变器开关损耗,减少电机定子电流谐波分量。
54、2、本发明一种pmsm三电平npc逆变器的无差拍预测电压控制方法中矢量的目标磁链简化算法步骤二中采用隐去中矢量,利用零矢量、小矢量、大矢量进行调制的方式,消除了中矢量电容c1、c2的电压值影响不可控性,仅利用零矢量、小矢量、大矢量进行调制,可实现中点电位的平衡控制;而且,其合成各扇区的空间电压矢量仅涉及小矢量及大矢量。相较于传统36扇区三电平svpwm算法,运算量减少一半。
- 还没有人留言评论。精彩留言会获得点赞!