一种基于摩擦纳米发电的仿尾鳍本体感知传感器
本发明涉及仿生传感器,具体而言,尤其涉及一种基于摩擦纳米发电的仿尾鳍本体感知传感器。
背景技术:
1、水下传感器作为感知水下环境信息的重要装置,一直以来都是研究研发的重点关注对象,但是在恶劣环境下的感知能力仍没有实质性的突破。仿生仿生鱼类机器人作为水下机器人的一类,因其具有高效的机动性、灵活的操作性等优点而被广泛的应用于水下勘探和海洋科学研究、水产养殖、水下搜救和水下娱乐等领域。
2、目前的仿生鱼类机器人,难以实现对自身姿态的感知并最终实现水下定位以及对机器鱼周围环境的感知,目前的解决方案主要为通过视觉传感器、加速度计和陀螺仪等设备获取仿生鱼类机器人的位置与姿态。但是当仿生鱼类机器人在复杂水域和水质环境较差的水域时,机器人无法通过现有的技术手段有效的获取姿态信息和水下位置信息,使得仿生鱼类机器人无法通过自身运动姿态反馈以实时的调整运动,进行精准的控制。同时也无法获取有效的实时位置进行准确的定位。因此造成了仿生类鱼尾机器人的工作效率低、鲁棒性差和自适应性差的问题。
技术实现思路
1、根据上述提出目前仿生鱼类机器人在水质情况较差、流场情况复杂的条件下感知自身运动姿态以及无法进行水下定位的问题,而提供一种基于摩擦纳米发电的仿尾鳍本体感知传感器。本发明通过将鱼尾摆动造成的传感单元弯曲而产生的电信号转换成鱼尾实时的姿态,再通过机器学习使鱼尾的姿态转换成仿生鱼类机器人的运动参数以及水下位置。
2、本发明采用的技术手段如下:
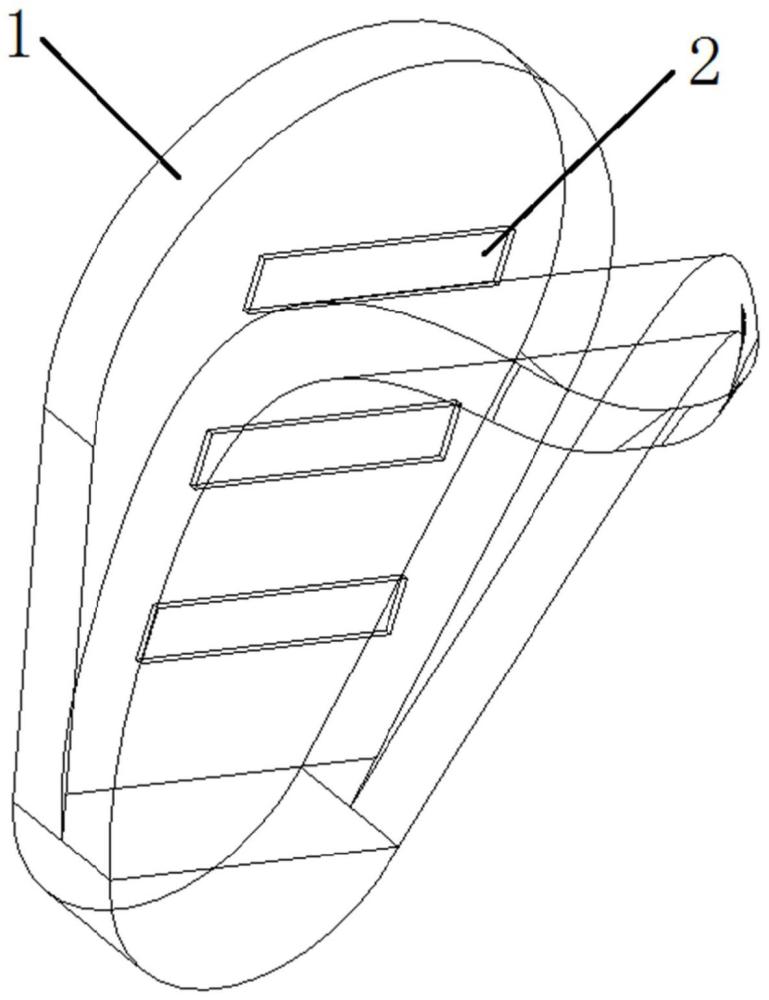
3、一种基于摩擦纳米发电的仿尾鳍本体感知传感器,设置于仿生鱼类机器人的尾鳍处,包括:
4、用以容纳传感单元的柔性外壳,所述柔性外壳内部设置有中空腔体,所述中空腔体内设置有传感单元,所述中空腔体两侧的柔性外壳的壁厚相同;
5、用以产生感知电信号的传感单元;所述传感单元将感知电信号发送至信号分析单元;
6、用以对感知电信号进行分析并得出仿生鱼类机器人运动状态以及来流方向的信号分析单元。
7、进一步地,所述传感单元包括依次排列的外部支撑材料、油墨电极、介电薄膜、油墨电极、介电薄膜和外部支撑材料,所述油墨电极附着于介电薄膜的表面,所述油墨电极附着于介电薄膜的表面。
8、进一步地,所述信号分析单元对感知电信号的分析,并得出仿生鱼类机器人运动状态的方法如下:
9、在仿生鱼类机器人静止时,所述油墨电极与介电薄膜之间不会接触分离,不产生感应电荷,通过电压信号分析可得仿生鱼类机器人处于静止状态;
10、当仿尾鳍本体感知传感器在仿生鱼类机器人尾部舵机的驱动下左右摆动时,使油墨电极与介电薄膜之间产生规律的周期电压信号;
11、当向左摆动和向右摆动的摆幅一致时,向左产生的周期电压信号和向右产生的周期电压信号幅值一致,通过电压信号分析可得仿生鱼类机器人处于直线前进状态;
12、当向左摆动产生的电信号大于向右摆动的电信号时,说明尾鳍向左摆动的幅度更大,即仿生鱼类机器人处于向左转弯的状态;
13、当向右摆动产生的电信号大于向左摆动的电信号时,说明尾鳍向右摆动的幅度更大,即仿生鱼类机器人处于向右转弯的状态。
14、进一步地,所述信号分析单元对感知电信号的分析,并得出仿生鱼类机器人的来流方向的方法如下:
15、当仿生鱼类机器人的左侧来流时,尾鳍向左摆动时产生的电信号中尖峰密度增加,当仿生鱼类机器人右侧来流时,尾鳍向右摆动产生的电信号尖峰密度增加。
16、进一步地,所述柔性外壳受防腐处理。
17、进一步地,所述柔性外壳的材料为硅胶。
18、进一步地,所述介电薄膜的表面材料为绝缘体或者半导体材料。
19、进一步地,所述油墨电极的外表面和介电薄膜为经纳米处理后的微纳结构。
20、进一步地,所述油墨电极的材料为导电材料薄膜或单层导电材料。
21、较现有技术相比,本发明具有以下优点:
22、1、本发明提供的基于摩擦纳米发电机的仿尾鳍形水下流场传感器,能够有效的感知仿生机器鱼尾鳍的摆动姿态、摆动频率、摆动幅度以及周围环境的扰动。相比传统传感器只能通过视觉进行感知的缺陷,本项目提出的仿尾鳍形水下流场传感器可以通过感知仿生机器鱼尾鳍的摆动姿态、摆动频率、摆动幅度以及周围环境的扰动,使机器鱼能够有效的通过感知自身的运动姿态进行有效的控制以及准确的水下定位。
23、2、本发明具有体积小、成本低的优势。在水下环境监测和水下作业机器人运动控制以及水下定位等方面具有重要应用价值。
24、3、本发明采用柔性薄膜的传感单元,可以根据环境及发明需求灵活设计单元的结构功能。
25、4、本发明对于复杂的海洋环境,可以通过将多个装有仿尾鳍形水下流场传感器尾鳍的机器鱼构成阵列以实现对复杂环境的有效感知。
26、5、本发明结构简单、牢固,不仅可以有效的减少海水拍打的压力,而且可以减少海水腐蚀对装置性能的影响。
27、6、本发明不仅可以高效的对水下流场变化进行感知,而且可以对水下环境参数进行只能收集整理。
28、综上,应用本发明的技术方案能够解决现有技术中的常用水下传感器大都属于传统的压力、离子浓度、视觉、声呐等,面对水下恶劣环境效果较差,无法实现对水下环境的灵敏感知的问题。
29、基于上述理由本发明可在摩擦纳米发电技术领域以及仿生技术领域等领域广泛推广。
技术特征:
1.一种基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,设置于仿生鱼类机器人的尾鳍处,包括:
2.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述传感单元(2)包括依次排列的外部支撑材料(3)、油墨电极(5)、介电薄膜(4)、油墨电极(5)、介电薄膜(4)和外部支撑材料(3),所述油墨电极(5)附着于介电薄膜(4)的表面,所述油墨电极(5)附着于介电薄膜(4)的表面。
3.根据权利要求2所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述信号分析单元对感知电信号的分析,并得出仿生鱼类机器人运动状态的方法如下:
4.根据权利要求2所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述信号分析单元对感知电信号的分析,并得出仿生鱼类机器人的来流方向的方法如下:
5.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述柔性外壳(1)受防腐处理。
6.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述柔性外壳(1)的材料为硅胶。
7.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述介电薄膜的表面材料为绝缘体或者半导体材料。
8.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述油墨电极(5)的外表面和介电薄膜为经纳米处理后的微纳结构。
9.根据权利要求1所述的基于摩擦纳米发电的仿尾鳍本体感知传感器,其特征在于,所述油墨电极(5)的材料为导电材料薄膜或单层导电材料。
技术总结
本发明提供一种基于摩擦纳米发电的仿尾鳍本体感知传感器涉及仿生传感器技术领域,设置于仿生鱼类机器人的尾鳍处,包括:用以容纳传感单元的柔性外壳,所述柔性外壳内部设置有中空腔体,所述中空腔体内设置有传感单元,所述中空腔体两侧的柔性外壳的壁厚相同;用以产生感知电信号的传感单元;所述传感单元将感知电信号发送至信号分析单元;用以对感知电信号进行分析并得出仿生鱼类机器人运动状态以及来流方向的信号分析单元。本发明解决了目前仿生鱼类机器人在水质情况较差、流场情况复杂的条件下感知自身运动姿态以及无法进行水下定位的问题。
技术研发人员:徐敏义,刘搏,徐鹏,刘建华,李原正,于爱强
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!