一种驱动电机主动防抖控制方法及系统与流程
本发明涉及新能源电动汽车,特别涉及一种驱动电机主动防抖控制方法及系统。
背景技术:
1、随着科技的进步以及生产力的快速发展,新能源汽车技术也日趋成熟,并且逐渐得到了人们的认可,已经在人们的日常生活中得到普及,降低了人们的出行成本,极大的方便了人们的生活。
2、其中,现有的新能源汽车主要由两部分组成,一种是纯电新能源电动汽车,另一种是油电混合动力新能源汽车,现如今,因其具有较高的经济性,已经在多个领域得到了应用。
3、现有的新能源汽车在行驶的过程中均会产生一定的振动,然而,由于现有的新能源汽车在驱动电机与车轮之间没有安装传统燃油汽车上的扭转阻尼减震器,导致车轮反馈至传动系统上的抖动无法被有效的阻断以及吸收,使得传动系统上的抖动会通过壳体以及悬挂等部件传递至车身内部,从而影响了车辆的平顺性以及舒适性,同时降低了用户的使用体验。
技术实现思路
1、基于此,本发明的目的是提供一种驱动电机主动防抖控制方法及系统,以解决现有技术无法有效的吸收以及阻断振动,导致抖动传递至车身内部,降低了车辆平顺性以及舒适性的问题。
2、本发明实施例第一方面提出了:
3、一种驱动电机主动防抖控制方法,其中,所述方法包括:
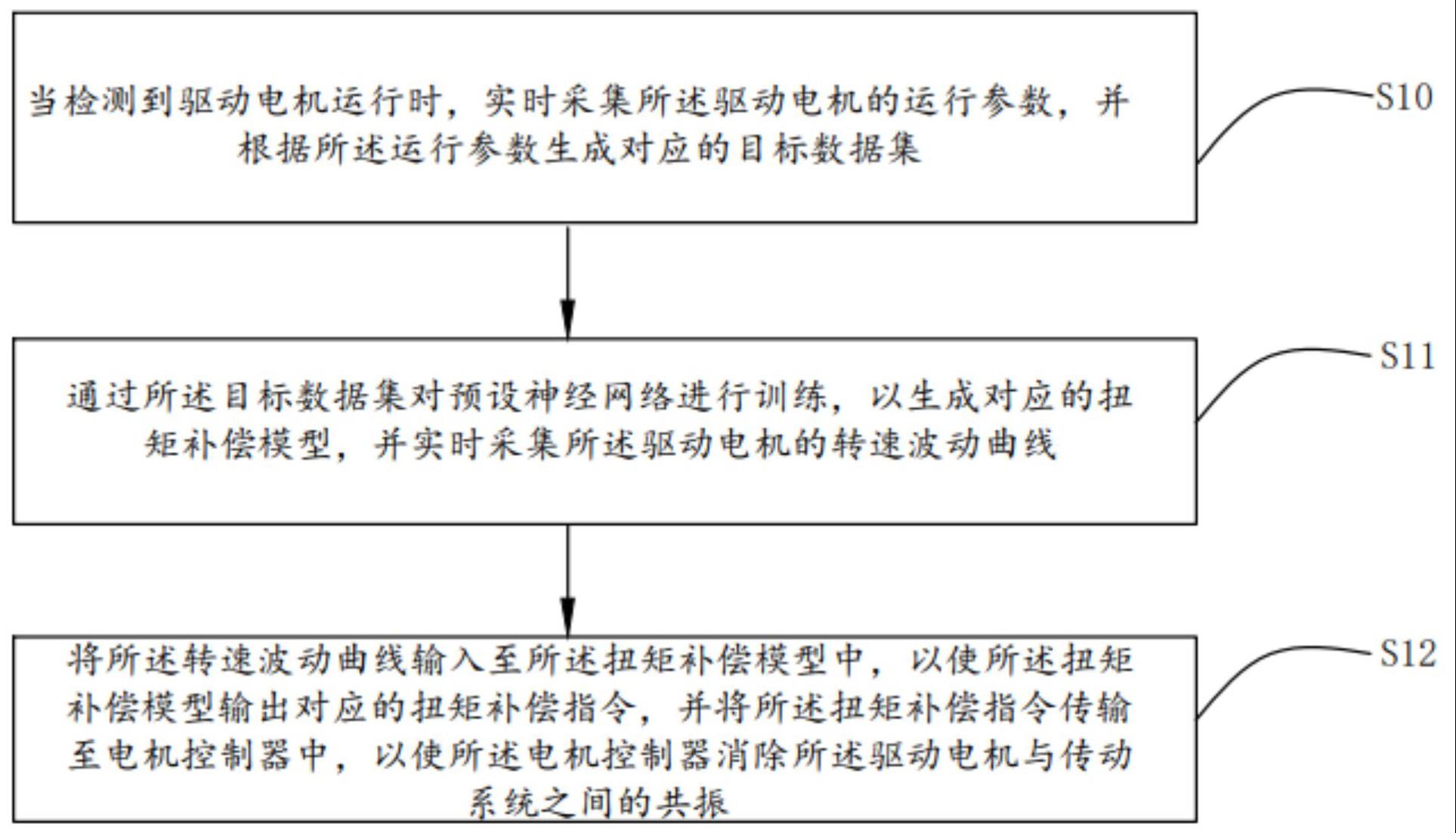
4、当检测到驱动电机运行时,实时采集所述驱动电机的运行参数,并根据所述运行参数生成对应的目标数据集;
5、通过所述目标数据集对预设神经网络进行训练,以生成对应的扭矩补偿模型,并实时采集所述驱动电机的转速波动曲线;
6、将所述转速波动曲线输入至所述扭矩补偿模型中,以使所述扭矩补偿模型输出对应的扭矩补偿指令,并将所述扭矩补偿指令传输至电机控制器中,以使所述电机控制器消除所述驱动电机与传动系统之间的共振;
7、其中,所述扭矩补偿模型的训练过程为:
8、采集历史的转速波动曲线与对应的扭矩补偿指令得到扭矩补偿训练数据集;
9、对所述训练数据集进行预处理,所述预处理至少包括清洗、降噪、特征提取、归一化、增强处理;
10、设计搭建自回归神经网络,并对所述自回归神经网络的参数进行初始化设定;
11、利用所述训练数据集对所述自回归神经网络进行训练,直至所述自回归神经网络的损失函数达到预设值。
12、进一步的,上述驱动电机主动防抖控制方法,其中,所述根据所述运行参数生成对应的目标数据集的步骤包括:
13、当获取到所述运行参数时,对所述运行参数进行预处理,并对预处理后的运行参数进行整合,以对应生成所述目标数据集,所述目标数据集具有唯一性。
14、进一步的,上述驱动电机主动防抖控制方法,其中,所述通过所述目标数据集对预设神经网络进行训练的步骤包括:
15、当获取到所述目标数据集时,基于预设规则将所述目标数据集拆分成对应的训练集以及验证集,并依次通过所述训练集以及所述验证集对所述预设神经网络进行自适应调整,以对应生成所述扭矩补偿模型。
16、进一步的,上述驱动电机主动防抖控制方法,其中,所述依次通过所述训练集以及所述验证集对所述预设神经网络进行自适应调整的步骤包括:
17、将所述训练集输入至所述预设神经网络的解析层中,以通过所述解析层将所述训练集解析成对应的训练代码;
18、将所述训练代码输入至所述预设神经网络的编码层中,以通过所述编码层将所述训练代码转换成对应的特征值;
19、将所述特征值输入至所述预设神经网络的学习层中,以对所述学习层进行自适应调整并生成所述扭矩补偿模型。
20、进一步的,上述驱动电机主动防抖控制方法,其中,所述将所述特征值输入至所述预设神经网络的学习层中,以对所述学习层进行自适应调整并生成所述扭矩补偿模型的步骤包括:
21、通过预设dtw算法对所述特征值进行序列化处理,以生成对应的特征序列,并提取出所述特征序列中包含的若干特征因子;
22、将若干所述特征因子输入至所述学习层中的学习网络中,并通过若干所述特征因子调整所述学习网络中的原始网络参数,以对应生成所述扭矩补偿模型。
23、进一步的,上述驱动电机主动防抖控制方法,其中,所述方法还包括:
24、建立与车辆内部的仪表盘的通信连接,并将所述驱动电机的输出扭矩实时显示在所述仪表盘上,且实时监测所述输出扭矩的大小。
25、进一步的,上述驱动电机主动防抖控制方法,其中,所述方法还包括:
26、实时判断所述输出扭矩是否大于预设扭矩阈值;
27、若实时判断到所述输出扭矩大于所述预设扭矩阈值,则在所述仪表盘中发出对应的提示信息,所述提示信息包括声音提示以及图标提示。
28、本发明的另一个目的提出一种驱动电机主动防抖控制系统,其中,所述系统包括:
29、检测模块,用于当检测到驱动电机运行时,实时采集所述驱动电机的运行参数,并根据所述运行参数生成对应的目标数据集;
30、采集模块,用于通过所述目标数据集对预设神经网络进行训练,以生成对应的扭矩补偿模型,并实时采集所述驱动电机的转速波动曲线;
31、控制模块,用于将所述转速波动曲线输入至所述扭矩补偿模型中,以使所述扭矩补偿模型输出对应的扭矩补偿指令,并将所述扭矩补偿指令传输至电机控制器中,以使所述电机控制器消除所述驱动电机与传动系统之间的共振;
32、其中,所述扭矩补偿模型的训练过程为:
33、采集历史的转速波动曲线与对应的扭矩补偿指令得到扭矩补偿训练数据集;
34、对所述训练数据集进行预处理,所述预处理至少包括清洗、降噪、特征提取、归一化、增强处理;
35、设计搭建自回归神经网络,并对所述自回归神经网络的参数进行初始化设定;
36、利用所述训练数据集对所述自回归神经网络进行训练,直至所述自回归神经网络的损失函数达到预设值。
37、进一步的,所述检测模块具体用于:
38、当获取到所述运行参数时,对所述运行参数进行预处理,并对预处理后的运行参数进行整合,以对应生成所述目标数据集,所述目标数据集具有唯一性。
39、进一步的,所述采集模块具体用于:
40、当获取到所述目标数据集时,基于预设规则将所述目标数据集拆分成对应的训练集以及验证集,并依次通过所述训练集以及所述验证集对所述预设神经网络进行自适应调整,以对应生成所述扭矩补偿模型。
41、进一步的,所述采集模块还具体用于:
42、将所述训练集输入至所述预设神经网络的解析层中,以通过所述解析层将所述训练集解析成对应的训练代码;
43、将所述训练代码输入至所述预设神经网络的编码层中,以通过所述编码层将所述训练代码转换成对应的特征值;
44、将所述特征值输入至所述预设神经网络的学习层中,以对所述学习层进行自适应调整并生成所述扭矩补偿模型。
45、进一步的,所述采集模块还具体用于:
46、通过预设dtw算法对所述特征值进行序列化处理,以生成对应的特征序列,并提取出所述特征序列中包含的若干特征因子;
47、将若干所述特征因子输入至所述学习层中的学习网络中,并通过若干所述特征因子调整所述学习网络中的原始网络参数,以对应生成所述扭矩补偿模型。
48、进一步的,所述驱动电机主动防抖控制系统还包括监测模块,所述监测模块具体用于:
49、建立与车辆内部的仪表盘的通信连接,并将所述驱动电机的输出扭矩实时显示在所述仪表盘上,且实时监测所述输出扭矩的大小。
50、进一步的,所述驱动电机主动防抖控制系统还包括判断模块,所述判断模块具体用于:
51、实时判断所述输出扭矩是否大于预设扭矩阈值;
52、若实时判断到所述输出扭矩大于所述预设扭矩阈值,则在所述仪表盘中发出对应的提示信息,所述提示信息包括声音提示以及图标提示。
53、本发明另一个目的在于提供一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上面所述的驱动电机主动防抖控制方法。
54、本发明另一个目的在于提供一种可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现如上面所述的驱动电机主动防抖控制方法。
55、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
56、本发明通过实时获取驱动电机的运行参数,能够对应知悉驱动电机的实时工作状态,进一步的,根据该驱动电机的运行参数构建出与其适配的扭矩补偿模型,基于此,再实时获取该驱动电机的转速波动曲线,并输入至上述扭矩补偿模型中,从而能够最终使该扭矩补偿模型输出用于调整该驱动电机的扭矩补偿指令,以对应消除该驱动电机与传动系统之间的共振,进而消除了抖动,同时提升了用户的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!