一种用于海上漂浮式光伏电站的智能清洁机器人
本发明涉及海上光伏电站结构安全和清洁,具体为一种用于海上漂浮式光伏电站的智能清洁机器人。
背景技术:
1、随着可再生能源的快速发展,光伏发电作为一种清洁、可持续的能源形式得到了广泛应用。为了充分利用海洋资源,海上漂浮式光伏电站成为一种吸引人的选择。然而,海上环境复杂多变,水生成污染和海藻生长等现象可能影响光伏电站的效率。因此,清洁和维护海上漂浮式光伏电站成为一项重要任务,为了解决这一问题,智能清洁机器人被引入,现有的智能清洁机器人可以在利用全球定位系统、视觉识别、激光雷达等传感器技术,实时获取位置和环境信息,实现对光伏发电板清洁,然而海上光伏由于析盐结晶、生物附着、强波浪动力作用等影响,其清洁和运维更加困难,同时海上漂浮式电站可能受到强风浪作用的影响,使得清洁机器人在施工作业的过程中会查产生一定程度的起浮晃动,使得清洁机器人不能在风浪比较大完成清洁任务,另外,由于海上漂浮式光伏板布置的实际情况,在一行光伏板之间具有微小缝隙,在相邻两行光伏板之间具有一定的间隙和高差,现有的清洁机器人无法跨版动作,使得机器人的自清洁装备的清洁范围较小,使用不方便,为此本领域技术人员提出一种用于海上漂浮式光伏电站的智能清洁机器人来解决上述问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于海上漂浮式光伏电站的智能清洁机器人,解决了现有技术上的陆上光伏清洁机器人无法应对光伏板本身产生晃动的情况,且达不到海上漂浮式光伏电站清洁所需的抗风浪要求的问题。
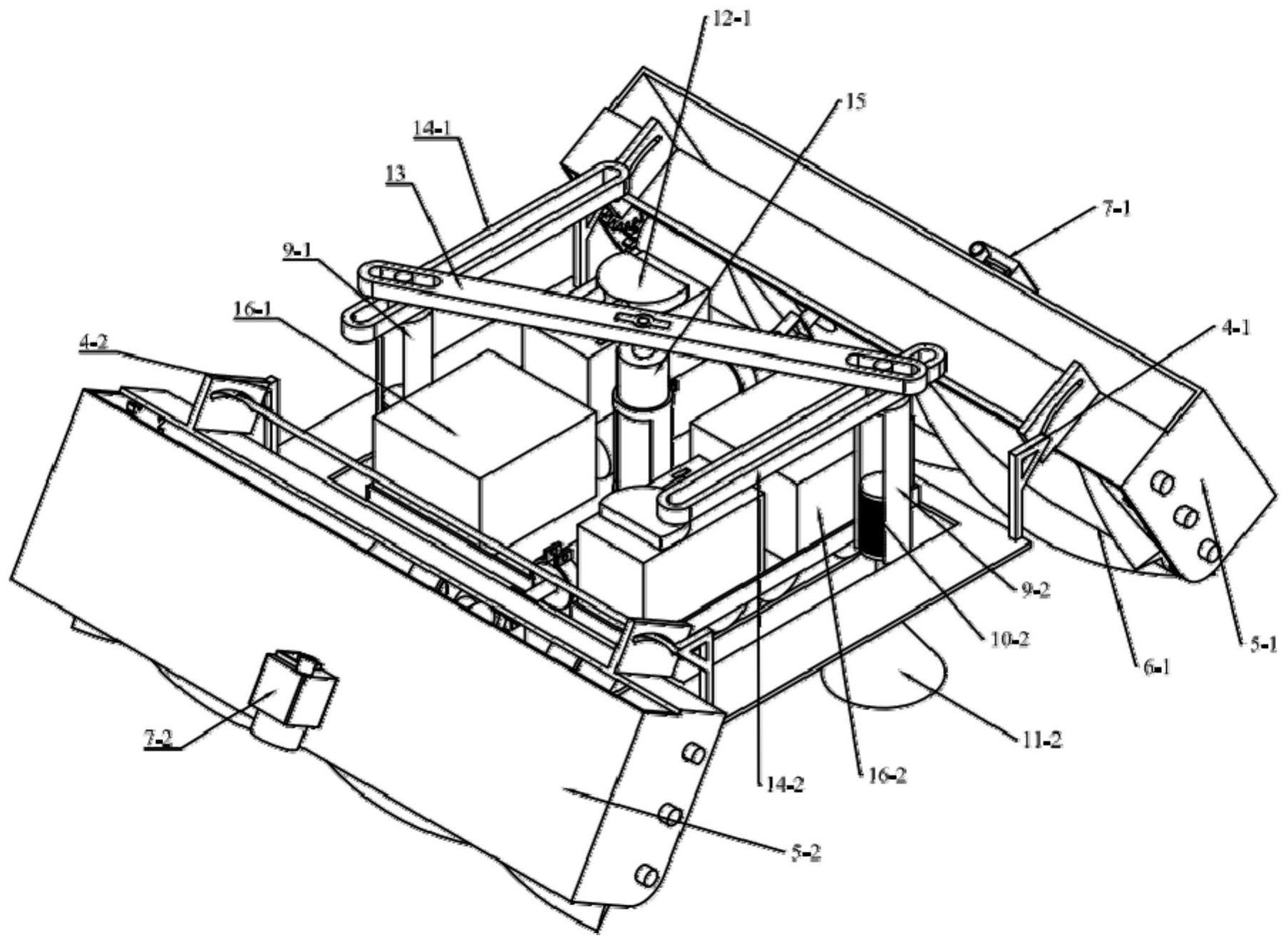
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于海上漂浮式光伏电站的智能清洁机器人,包括外圈底盘、左侧气泵、右侧气泵和外壳,所述外圈底盘的顶部固定连接有内圈底盘,所述内圈底盘的顶部左侧滑动连接有左侧吸盘壳体,所述左侧吸盘壳体的内部上端安装有电磁铁,所述左侧吸盘壳体的内部下端安装有左侧吸盘弹簧,所述左侧吸盘壳体的底部通孔处安装有左侧吸盘,且所述左侧吸盘的吸盘口向下,所述内圈底盘的顶部右侧滑动连接有右侧吸盘壳体,所述右侧吸盘壳体的内部下端安装有右侧吸盘弹簧,所述右侧吸盘壳体的底部通孔处安装有右侧吸盘,所述外壳固定安装在内圈底盘的顶部,所述内圈底盘的内部左右两侧分别固定连接有左侧吸盘限位轨道和右侧吸盘限位轨道,所述内圈底盘的顶端中部安装有滑动连杆驱动电机,所述滑动连杆驱动电机的输出端固定连接有连杆。
3、优选的,所述内圈底盘的顶部一侧安装有左侧气泵,所述内圈底盘的顶部另一侧安装有右侧气泵,所述左侧气泵的进气口通过一根软管与左侧吸盘相连,所述右侧气泵的进气口通过一根软管与右侧吸盘相连。
4、优选的,所述外圈底盘的一端通过前向滚刷外壳限位架连接有前侧滚刷外壳,所述外圈底盘的另一端通过后向滚刷外壳限位架连接有后侧滚刷外壳,所述前侧滚刷外壳和所述后侧滚刷外壳的内部两端开设有空洞,两个所述空洞的内部分别安装有前滚刷和后滚刷,所述内圈底盘的顶部前侧安装有前向滚刷驱动电机,所述内圈底盘的顶部后侧安装有后向滚刷驱动电机,所述前向滚刷驱动电机通过前向万向节与前滚刷相连,所述后向滚刷驱动电机通过后向万向节与后滚刷相连。
5、优选的,所述内圈底盘的顶部左右两侧一侧安装有左侧锂电池和右侧锂电池,所述左侧锂电池和右侧锂电池均与前向滚刷驱动电机、滑动连杆驱动电机电性连接,后向滚刷驱动电机、左侧气泵、右侧气泵电性连接。
6、优选的,所述内圈底盘的底部安装有履带驱动箱,所述履带驱动箱位于机器几何中心的位置上,所述履带驱动箱内部装有一个履带驱动电机,所述驱动电机的输出端固定连接有履带驱动轮,所述履带驱动箱的内部安装有履带支撑轮,所述履带支撑轮和履带驱动轮外部设置有履带。
7、优选的,所述前侧滚刷外壳的外部安装有前向摄像头,所述后侧滚刷外壳的外部安装有后向摄像头。
8、优选的,所述左侧吸盘限位轨道和右侧吸盘限位轨道的内部均开设有活动槽,所述连杆的左右两端尽头处均开设有槽口,所述左侧吸盘壳体和右侧吸盘壳体的顶部转轴贯穿活动槽且设置在所述槽口的内部。
9、优选的,所述连杆的上表面安装有支撑板,所述支撑板的顶部固定连接在外壳的内壁。
10、优选的,所述支撑板的顶部安装有控制面板,所述控制面板通过电线与左侧气泵、右侧气泵、前向摄像头、后向摄像头、前向滚刷驱动电机和后向滚刷驱动电机相连
11、一种用于海上漂浮式光伏电站的智能清洁机器人的使用方法,包括以下步骤:
12、步骤一:本机器人需要向前方移动时,此时控制右侧吸盘壳体中电磁铁断开,右侧吸盘变为吸附状态,左侧吸盘壳体中电磁铁接通,左侧吸盘为抬起状态,此时启动滑动连杆驱动电机和履带驱动箱内部的履带电机,履带电机的工作带动履带工作,滑动连杆驱动电机的运转使得连杆发生摆动,并使得左侧吸盘壳体顶部转轴沿着左侧吸盘限位轨道内部的活动槽移动,在机器人移动两个限位轨道的长度后,右侧吸盘壳体移动到右侧吸盘限位轨道下端,左侧吸盘壳体移动到左侧吸盘限位轨道上端,此时履带驱动箱暂停工作,左侧吸盘壳体中电磁铁断开,左侧吸盘下落到板子上,左侧气泵开始工作,一小段时间后,左侧吸盘变为吸附状态,接着右侧气泵停止工作,右侧吸盘壳体中电磁铁接通,右侧吸盘抬起,履带驱动箱开始工作,机器人向上方继续前进;
13、步骤二:在机器人主体的前后分别安装前滚刷和后滚刷,并分别启动前向滚刷驱动电机和后向滚刷驱动电机驱动前滚刷和后滚刷,对光伏板进行清洁,前后滚刷外安装于前侧滚刷外壳和后侧滚刷外壳的前向摄像头和后向摄像头负责收集机器人前后的视频数据,通过控制面板中的处理器,计算出板面清洁效果与机器人当前位置;
14、步骤三:当本机器人需要左转弯时,将滑动连杆驱动电机进行锁住,使得连杆不再能绕中心轴旋转,并将左侧吸盘调整为吸附状态,右侧吸盘抬起,启动履带驱动箱,带动右侧履带驱动轮运动,使机器人进行以左侧吸盘为圆心的圆周运动,实现左转,在进行右转弯时则右侧吸盘调整为吸附状态,左侧吸盘抬起,使机器人进行以右侧吸盘为圆心的圆周运动,实现右转优选的。
15、本发明提供了一种用于海上漂浮式光伏电站的智能清洁机器人。具备以下有益效果:
16、1、本发明通过增设左侧吸盘、右侧吸盘、左侧气泵、右侧气泵、连杆等机构之间的相互配合使用,可以将机器人通过吸盘固定在光伏板上,能适应的板面倾斜角度更大,在海风比较大的时候也能保证机器人不会被掀翻,同时可以有效保证海上漂浮式光伏智能清洁机器人安全,降低海上漂浮式光伏清洁成本。
17、2、本发明通过利用先后两个摄像头,可以获取清洗前后的板面状态,自行判断是否需要反复清洗,以达到全自动清洁的目的,同时结构设计合理,便于人们操作使用。
18、3、本发明通过依靠左侧吸盘壳体与右侧吸盘壳体的相互配合使用,本机器人可以把闲置吸盘抬起一定高度,在前进到下一块光伏板时,可以跨过相应的高度,吸附到下一块板子上,实现自动跨板动作,如此让本机器人的自清洁装备的清洁范围更大,使用更方便。
技术特征:
1.一种用于海上漂浮式光伏电站的智能清洁机器人,包括外圈底盘(1)、左侧气泵(12-1)、右侧气泵(12-2)和外壳(23),其特征在于,所述外圈底盘(1)的顶部固定连接有内圈底盘(2),所述内圈底盘(2)的顶部左侧滑动连接有左侧吸盘壳体(9-1),所述左侧吸盘壳体(9-1)的内部上端安装有电磁铁,所述左侧吸盘壳体(9-1)的内部下端安装有左侧吸盘弹簧(10-1),所述左侧吸盘壳体(9-1)的底部通孔处安装有左侧吸盘(11-1),且所述左侧吸盘(11-1)的吸盘口向下,所述内圈底盘(2)的顶部右侧滑动连接有右侧吸盘壳体(9-2),所述右侧吸盘壳体(9-2)的内部下端安装有右侧吸盘弹簧(10-2),所述右侧吸盘壳体(9-2)的底部通孔处安装有右侧吸盘(11-2),所述外壳(23)固定安装在内圈底盘(2)的顶部,所述内圈底盘(2)的内部左右两侧分别固定连接有左侧吸盘限位轨道(14-1)和右侧吸盘限位轨道(14-2),所述内圈底盘(2)的顶端中部安装有滑动连杆驱动电机(15),所述滑动连杆驱动电机(15)的输出端固定连接有连杆(13)。
2.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述内圈底盘(2)的顶部一侧安装有左侧气泵(12-1),所述内圈底盘(2)的顶部另一侧安装有右侧气泵(12-2),所述左侧气泵(12-1)的进气口通过一根软管与左侧吸盘(11-1)相连,所述右侧气泵(12-2)的进气口通过一根软管与右侧吸盘(11-2)相连。
3.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述外圈底盘(1)的一端通过前向滚刷外壳限位架(4-1)连接有前侧滚刷外壳(5-1),所述外圈底盘(1)的另一端通过后向滚刷外壳限位架(4-2)连接有后侧滚刷外壳(5-2),所述前侧滚刷外壳(5-1)和所述后侧滚刷外壳(5-2)的内部两端开设有空洞,两个所述空洞的内部分别安装有前滚刷(6-1)和后滚刷(6-2),所述内圈底盘(2)的顶部前侧安装有前向滚刷驱动电机(3-1),所述内圈底盘(2)的顶部后侧安装有后向滚刷驱动电机(3-2),所述前向滚刷驱动电机(3-1)通过前向万向节(8-1)与前滚刷(6-1)相连,所述后向滚刷驱动电机(3-2)通过后向万向节(8-2)与后滚刷(6-2)相连。
4.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述内圈底盘(2)的顶部左右两侧一侧安装有左侧锂电池(16-1)和右侧锂电池(16-2),所述左侧锂电池(16-1)和右侧锂电池(16-2)均与前向滚刷驱动电机(3-1)、滑动连杆驱动电机(15)电性连接,后向滚刷驱动电机(3-2)、左侧气泵(12-1)、右侧气泵(12-2)电性连接。
5.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述内圈底盘(2)的底部安装有履带驱动箱(20),所述履带驱动箱(20)位于机器几何中心的位置上,所述履带驱动箱(20)内部装有一个履带驱动电机,所述驱动电机的输出端固定连接有履带驱动轮(17-2),所述履带驱动箱(20)的内部安装有履带支撑轮(18-2),所述履带支撑轮(18-2)和履带驱动轮(17-2)外部设置有履带(19-2)。
6.根据权利要求3所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述前侧滚刷外壳(5-1)的外部安装有前向摄像头(7-1),所述后侧滚刷外壳(5-2)的外部安装有后向摄像头(7-2)。
7.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述左侧吸盘限位轨道(14-1)和右侧吸盘限位轨道(14-2)的内部均开设有活动槽,所述连杆(13)的左右两端尽头处均开设有槽口,所述左侧吸盘壳体(9-1)和右侧吸盘壳体(9-2)的顶部转轴贯穿活动槽且设置在所述槽口的内部。
8.根据权利要求1所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述连杆(13)的上表面安装有支撑板(21),所述支撑板(21)的顶部固定连接在外壳(23)的内壁。
9.根据权利要求8所述的一种用于海上漂浮式光伏电站的智能清洁机器人,其特征在于,所述支撑板(21)的顶部安装有控制面板(22),所述控制面板(22)通过电线与左侧气泵(12-1)、右侧气泵(12-2)、前向摄像头(7-1)、后向摄像头(7-2)、前向滚刷驱动电机(3-1)和后向滚刷驱动电机(3-2)相连。
10.一种用于海上漂浮式光伏电站的智能清洁机器人的使用方法,其特征在于,依据权利要求1-9任一项所述的一种用于海上漂浮式光伏电站的智能清洁机器人,包括以下步骤:
技术总结
本申请涉及海上光伏电站结构安全和清洁技术领域,公开了一种用于海上漂浮式光伏电站的智能清洁机器人,包括外圈底盘、左侧气泵、右侧气泵和外壳,所述外圈底盘的顶部固定连接有内圈底盘,所述内圈底盘的顶部左侧滑动连接有左侧吸盘壳体,所述左侧吸盘壳体的内部上端安装有电磁铁,所述左侧吸盘壳体的内部下端安装有左侧吸盘弹簧,所述左侧吸盘壳体的底部通孔处安装有左侧吸盘<subgt;,</subgt;所述右侧吸盘壳体的底部通孔处安装有右侧吸盘。通过利用吸盘将机器人固定在光伏板上,能适应的板面倾斜角度更大,在海风比较大的时候也能保证机器人不会被掀翻,同时可以有效保证海上漂浮式光伏智能清洁机器人安全,实现自动跨板运行,降低海上漂浮式光伏清洁成本。
技术研发人员:刘孟孟,李易初,练继建,高喜峰,姚烨,于丽娜,崔益鸣,王婷,梁镇宇,马鹏英,徐正阳
受保护的技术使用者:天津理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!