一种永磁同步平面电机的解耦方法与流程
本发明涉及电机的控制,特别是涉及一种永磁同步平面电机的解耦方法。
背景技术:
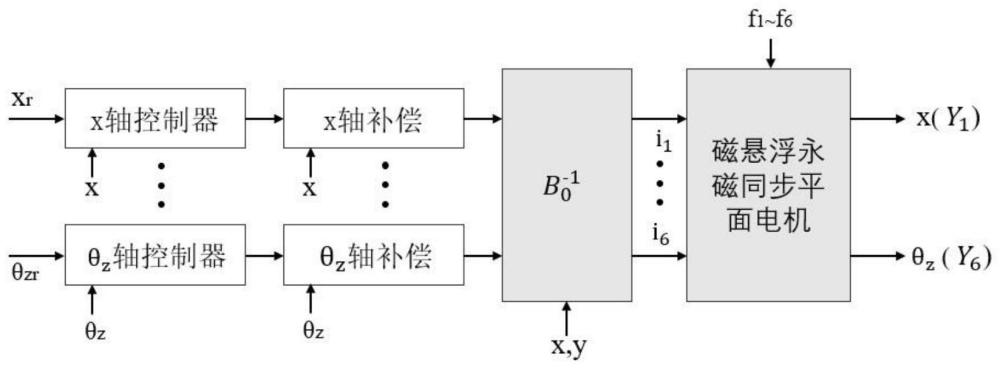
1、永磁同步平面电机(permanent magnet synchronous planar motor,pmspm)在结构、控制精度、损耗等方面具有良好的综合性能,所以在光刻机等现代精密、超精密制造装备中被广泛应用,其结构如图1所示。平面电机采用的支撑方式主要有机械、气浮和磁浮三种形式。考虑到下一代光刻机为了实现更高的精度和分辨率要采用波长更短的紫外光作为光刻光源,光刻工艺要求光刻平台在真空环境下工作,以避免空气对光能的吸收。机械支撑需要润滑,润滑剂能够污染真空环境,气浮支撑也受限于真空环境的约束。因此,磁悬浮平面电机更符合光刻机的发展趋势。
2、在理想的磁悬浮平面电机模型条件下,采用广义逆矩阵的解耦方法能够解决磁悬浮平面电机控制系统中的耦合问题。但实际所建立的磁悬浮平面电机模型存在建模误差,同时磁悬浮平面电机也存在永磁体尺寸偏差、永磁体充磁偏差及制造误差。通常由于上述不利因素的存在,采用广义逆矩阵的解耦方法能够使得磁悬浮平面电机系统由强耦合系统转变到弱耦合系统,为了得到更好的运动控制性能,应对该弱耦合系统进一步优化解耦性能。
3、对于磁悬浮永磁同步平面电机来说,当绕组结构、绕组布置方式及永磁阵列结构确定后,其系统的耦合关系就已经确定。在平面电机电磁模型的基础上,采用数学及控制理论的方法,实时求解出动子在不同位置下的控制电流,就能实现动子六自由度运动控制。
4、采用广义逆矩阵的解耦方式可以实现对磁悬浮永磁同步平面电机的解耦控制,但其解耦精度依赖于电磁模型精度,由于加工误差带来的模型误差难以在建模中体现,因此对静态解耦进行动态补偿具有重要的意义。
5、根据电磁力和转矩方程能够得到磁悬浮永磁同步平面电机系数矩阵,通过对该系数矩阵求取广义逆矩阵就能实现对永磁同步平面电机的电磁解耦。通常根据磁悬浮永磁同步平面电机结构的不同解耦可以有很多方式,但是解耦目的一致,就是求取能够实现平面电机运动控制的电流。十六相磁悬浮平面电机其系数矩阵为6×16矩阵,广义逆矩阵有多组电流解,通过添加约束条件可以选取不同的解系。
6、在理想情况下,采用广义逆矩阵的方法进行解耦能够实现系统的完全解耦,但是由于模型偏差及电机制造误差等因素导致解耦后的子系统间仍然存在一定的弱耦合。
7、中国专利cn201710213921.x公开了一种大面积磁浮平面电机动子的三自由度位置测量方法,该方法采用的测量系统包括八个z向电涡流传感器、两个y向电涡流传感器、一个x方向绝对光栅和一个y方向绝对光栅。能够克服磁钢表面散热孔对z向电涡流传感器位移测量的干扰,实现平面电机动子在定子固定坐标系中的三自由度准确测量。但该专利未在解耦方面进行更多的优化设计。
8、中国专利cn201811574277.x公开了一种基于光刻机磁悬浮平面电机运动系统的线圈电流切换算法,建立平面电机动子的六自由度受力与线圈电流之间的耦合方程,将动子线圈分为切换组和非切换组,再根据线圈离开磁钢阵列的方式,将切换组又分为突变切换组和渐变切换组;对突变切换组采用s函数作为电流切换权重函数,对渐变切换组采用余弦函数作为电流切换权重函数,以所有线圈电流矢量的二范数最小为目标,对力与电流的耦合方程进行求解得到各线圈电流值。能够尽可能地减小平面电机线圈的发热损耗,同时实现动圈式磁悬浮平面电机动子全运动范围内线圈电流的光滑切换。但该专利是对动子线圈进行分组更换权重函数,未在解耦方面进行更多的优化设计。
技术实现思路
1、本发明的目的是要提供一种永磁同步平面电机的解耦方法,解决了优化解耦性能的问题,实现减小永磁同步平面电机六个自由度间的耦合程度,进而能够减小动子在运动过程中对其它自由度上位置闭环控制的影响,提高永磁同步平面电机位置环控制性能的方法。
2、为达到上述目的,本发明采用的技术方案是:
3、本发明提供了一种永磁同步平面电机的解耦方法,它包括以下步骤:
4、s1:建立永磁同步平面电机m入m出的二阶系统方程;
5、s2:针对已建模型系数、模型偏差引起的系数摄动量组成的耦合矩阵,将其与外部扰动、与控制量无关部分进行组合、变换,得到变换后的方程;
6、s3:使用扩张状态观测器,将系统未知外扰、模型内扰统一视为系统的总扰动,作为非线性不确定对象的扩张状态加以观测,建立其数学模型,与s2所得变换后方程结合,合理选择其数学模型的参数,有效实现对等效扰动的估计;
7、s4:根据得到的对等效扰动的有效估计,经过扩张状态观测器的非线性动态补偿以后,组合得到新的方程,据此将含有未知不确定因素的原系统看作是一组互相独立的单输入、单输出的子系统。
8、优选地,采用广义逆矩阵解耦将强耦合系统转变成多个具有弱耦合的子系统,在这些子系统内的某一个子系统上,将其它子系统对该子系统的耦合视为作用在该子系统中的总扰动,采用扩张状态观测器进行估计并补偿,
9、对于一个m入m出的二阶系统写成:
10、
11、
12、……;
13、
14、y1=x1,y2=x2,…,ym=xm;
15、式中yi、ui、xi为第i个子系统的输出、输入、状态变量;fi为外部扰动;gi为与控制量无关部分;bij、δbij分别已建模型系数、模型偏差引起的系数摄动量;
16、假定耦合系统中的耦合矩阵可逆,列写为b=b0+δb;
17、
18、式中b0、δb分别为静态耦合矩阵和由模型偏差引起的参数摄动矩阵;
19、定义为第i个子系统的总扰动;
20、根据定义,二阶系统写成:
21、
22、……;
23、
24、y1=x1,y2=x2,…,ym=xm;
25、令u=bou,且有u=b0-1u,得到:
26、
27、……;
28、
29、y1=x1,y2=x2,…,ym=xm;
30、扩张状态观测器数学模型为:
31、e=z1-y;
32、
33、
34、
35、其中,
36、在|e|>δ时,fal(e,α,δ)=|e|αsign(e),在|e|<δ时,fal(e,α,δ)=e/δ1-α,
37、其中的e为系统误差,u(t)、y、b分别为系统的控制量、输出和系数;β1、β2、β3分别为输出误差校正增益;α为非线性因子,一般取0.5、0.25和0.125;δ为滤波因子,δ>0;z1、z2、z3分别为y跟踪信号,z1微分信号,系统扰动的跟踪信号。
38、优选地,扩张状态观测器数学模型中z3为观测的扰动有式中的参数m值为6,二阶系统写为:
39、
40、
41、……;
42、
43、y1=x1,y2=x2,…,ym=xm。
44、优选地,通过扩张状态观测器来实现利用系统输出实时估计被控对象的状态,将系统未知外扰、模型内扰统一视为系统的总扰动,作为非线性不确定对象的扩张状态加以观测,以实现反馈控制及扰动补偿。
45、由于上述技术方案运用,本发明与现有技术相比具有下列优点:
46、本发明的永磁同步平面电机的解耦方法,提供了一种采用扩张状态观测器对永磁同步平面电机进行动态补偿的方法,该方法能够明显的减小六个自由度间的耦合程度,进而能够减小磁悬浮电机动子在运动过程中对其它自由度上位置闭环控制的影响,提高磁悬浮电机的位置环控制性能。
- 还没有人留言评论。精彩留言会获得点赞!