一种基于状态反馈的虚拟同步机动态解耦控制方法及系统与流程
本发明属于新能源发电控制,涉及一种基于状态反馈的虚拟同步机动态解耦控制方法及系统。
背景技术:
1、随着大规模新能源的接入,大量电力电子装置接入电网,传统的跟网型(grid-following,gfl)控制策略可能存在弱网稳定性问题,在电网强度不断降低的当下,稳定性问题影响着电力系统的正常运行。
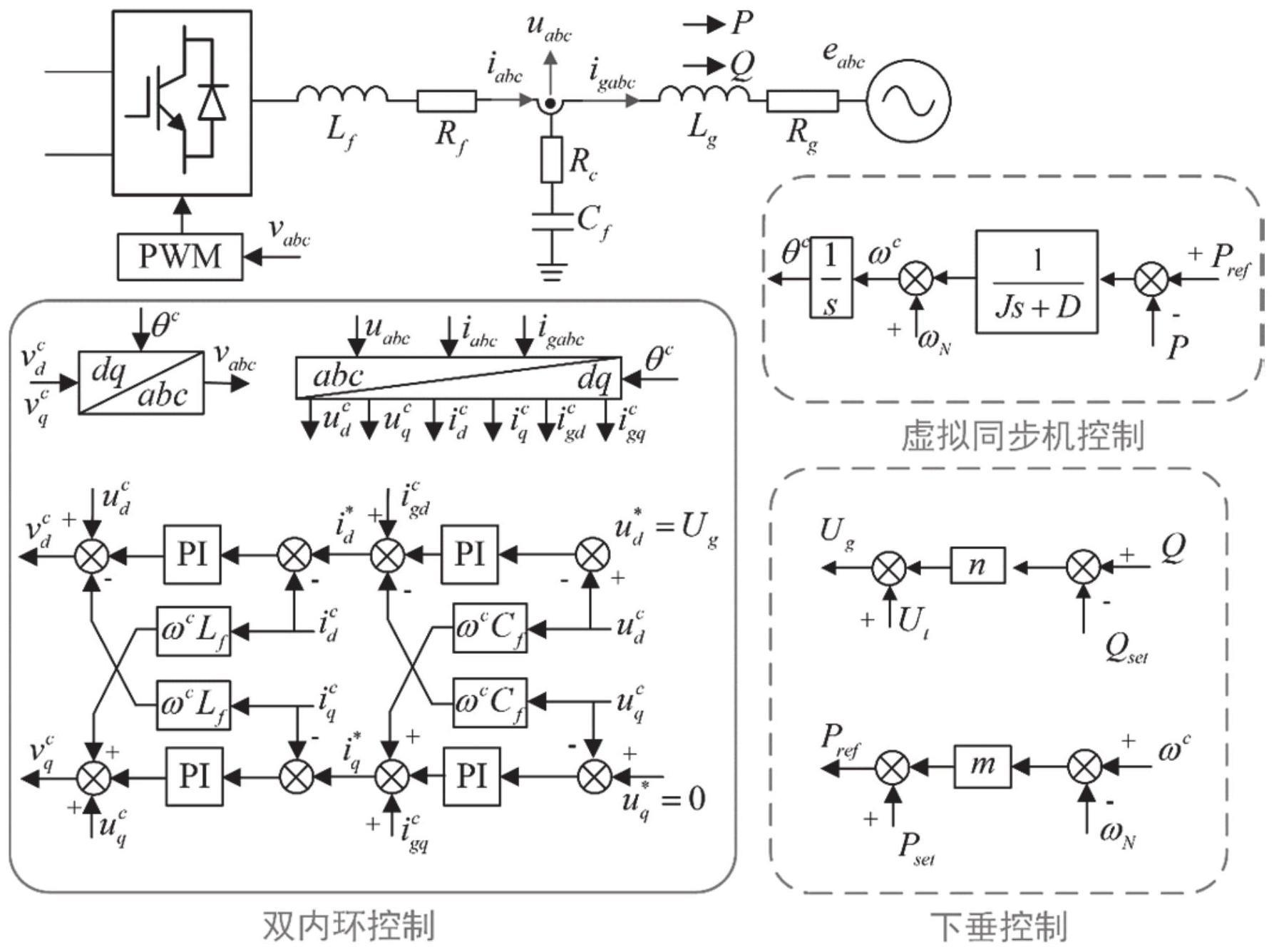
2、gfl控制一般采用锁相环(phase locked loop,pll)获取电网频率及相位用于dq变换。其特点在于响应速度快,能够最大功率追踪(maximum power point tracking,mppt)。但弱网条件下,gfl换流器会呈现负阻抗特性,进而导致振荡失稳。构网型(grid-forming,gfm)控制策略则无锁相环结构,与同步发电机相似,采取功率同步的方式调节相位,其弱网稳定性得到了较大提升,但由于输电线路存在相位和幅值的耦合通道,进而产生了功率耦合问题。功率耦合分为两种,一种是静态功率耦合,另一种是动态功率耦合。静态功率耦合会造成下垂控制中有功功率变化后无功功率产生控制误差,动态功率耦合会造成在线路阻抗电阻过大或短路比较大时产生振荡。
3、为了克服由于线路阻抗带来的动/静态功率耦合问题,当前研究主要以设计相应的虚拟阻抗控制策略以减少耦合,保证系统无差或稳定,但是这种方法还是有一定的缺陷,一方面,减少耦合的改进思路并未消除耦合问题,在线路或功角发生变化时仍然可能再次导致问题的出现;另一方面,当前改进措施往往只针对动态或静态耦合,适用性欠缺。
技术实现思路
1、本发明的目的在于解决现有技术中静态功率耦合和动态功率耦合,会造成下垂控制中有功功率变化后无功功率产生控制误差,线路阻抗电阻过大或短路比较大时产生振荡的问题,提供一种基于状态反馈的虚拟同步机动态解耦控制方法及系统。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种基于状态反馈的虚拟同步机动态解耦控制方法,包括以下步骤:
4、实时获取并网点电压、有功功率和无功功率,基于有功功率和无功功率获取换流器相位,基于并网点电压获取并网点电压幅值;
5、基于换流器相位和并网点电压幅值构建动静态功率耦合传递函数;
6、构建动静态解耦控制器,基于动静态解耦控制器对动静态功率耦合传递函数进行解耦,获取解耦后的动静态功率耦合传递函数;
7、基于解耦后的动静态功率耦合传递函数,计算获取解耦的状态反馈矩阵和输入变换矩阵,将实际采集的有功功率与设定的有功功率差值和实际采集的无功功率与设定的无功功率的差值替代解耦后的动静态功率耦合传递函数中的状态变量;
8、基于替换后的状态变量、状态反馈矩阵和输入变换矩阵获取解耦后的状态变量。
9、本发明的进一步改进在于:
10、所述基于替换后的状态变量、状态反馈矩阵和输入变换矩阵获取解耦后的状态变量包括以下步骤:
11、将修改后的状态变量与状态反馈矩阵相乘得到反馈量;
12、将未解耦前的相位与输入变换矩阵相乘得到变换后的输入量;
13、将反馈量与变换后的输入量相加获取解耦后的相位幅值。
14、所述基于有功功率和无功功率获取换流器相位,基于并网点电压获取并网点电压幅值包括以下步骤:
15、通过公式(1)获取换流器相位θc:
16、
17、式中,m为有功下垂系数,ωn为电网额定电角速度,j、d为虚拟同步控制惯量和阻尼,pset为设定下垂有功功率,ωc为换流器电角速度,pref虚拟同步机输入功率;
18、通过公式(2)获取并网点电压幅值ug:
19、ug=n(q-qset)+ut (2)
20、式中,n为无功下垂系数,qset为设定下垂无功功率,ut为额定电压幅值,ug为并网点电压幅值。
21、所述基于换流器相位和并网点电压幅值构建动静态功率耦合传递函数包括以下步骤:
22、通过公式(3)表示动静态功率耦合传递函数转化为状态空间形式:
23、
24、其中:
25、
26、
27、
28、式中,δp、δq、δθc和δug分别代表有功功率、无功功率、相位和电压幅值的小信号值;和分别代表功和无功功率的小信号量导数。
29、所述构建动静态解耦控制器,基于动静态解耦控制器对动静态功率耦合传递函数进行解耦包括以下步骤:
30、通过公式(7)表达解耦后的状态空间:
31、
32、其中:
33、
34、式中,f为输入变换矩阵,k为状态反馈反馈矩阵,e和l为中间变量。
35、所述解耦后的状态变量的获取过程包括:
36、
37、式中,ghpf为高通滤波器的传递函数,表示解耦后的相位,ugde表示解耦后的电压幅值,p-pset表示实际采集的有功功率与设定的有功功率差值;q-qset表示实际采集的无功功率与设定的无功功率的差值。
38、所述ghpf通过公式(10)表达:
39、
40、式中,t为高通滤波器时间常数。
41、一种基于状态反馈的虚拟同步机动态解耦控制系统,包括:
42、实时数据获取模块,用于实时获取并网点电压、有功功率和无功功率,基于有功功率和无功功率获取换流器相位,基于并网点电压获取并网点电压幅值;
43、函数构建模块,用于基于换流器相位和并网点电压幅值构建动静态功率耦合传递函数;
44、解耦模块,用于构建动静态解耦控制器,基于动静态解耦控制器对动静态功率耦合传递函数进行解耦,获取解耦后的动静态功率耦合传递函数;
45、第一计算模块,用于基于解耦后的动静态功率耦合传递函数,计算获取解耦的状态反馈矩阵和输入变换矩阵,将实际采集的有功功率与设定的有功功率差值和实际采集的无功功率与设定的无功功率的差值替代解耦后的动静态功率耦合传递函数中的状态变量;
46、第二计算模块,用于基于替换后的状态变量、状态反馈矩阵和输入变换矩阵获取解耦后的状态变量。
47、一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明任一项所述方法的步骤。
48、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明任一项所述方法的步骤。
49、与现有技术相比,本发明具有以下有益效果:
50、本发明公开了一种基于状态反馈的虚拟同步机动态解耦控制方法,建立动静态功率耦合传递函数,并对动静态功率耦合传递函数进行解耦,之后经过计算获取解耦的状态反馈矩阵和输入变换矩阵,本方法进行动静态同时解耦,增强稳定性的同时提升功率分配精度,进一步通过将实际采集的有功功率与设定的有功功率差值和实际采集的无功功率与设定的无功功率的差值替代解耦后的动静态功率耦合传递函数中的状态变量,达到不影响系统正常运行并等效解耦的效果,本方法兼顾动态耦合和静态耦合,一方面避免下垂控制因耦合引起的误差,另一方面增强gfm换流器稳定性,避免产生振荡,提升系统稳定性。
- 还没有人留言评论。精彩留言会获得点赞!