基于超螺旋滑模观测器的储能变流器改进自抗扰控制方法
本发明属于电力电子变换器,具体涉及基于超螺旋滑模观测器的储能变流器改进自抗扰控制方法。
背景技术:
1、近年来,由于化石能源的广泛使用导致能源短缺和环境问题日益加剧,在此背景下我国提出“双碳”目标。越来越多的研究人员将目光投向太阳能、风能等清洁型新能源。由于新能源的一次能源形式具有一定的随机性和波动性会直接导致新能源发电的不稳定性,故而在兴建新能源电站时往往会有一定量的储能配套装置,以提高新能源发电的供电可靠性。储能系统的稳定运行是新能源发电在削峰填谷、源荷平衡等方面承担重要作用的前提。在储能系统中可以通过储能变流器(power conversion system,pcs)控制储能系统输出给定的功率供给负载使用,pcs是储能系统不可或缺的部分,因此对该部分控制策略的研究,是保障储能系统稳定运行的关键。在已有的pcs控制策略中多为传统线性比例积分(pi)控制,但pi控制存在一定的不足,例如超调大、暂态时间长、抗扰动能力差等。
2、现有非线性控制中有模型预测控制、模糊控制、重复控制、自抗扰控制、滑模控制等。有文献将比例积分控制器结合模型预测控制,降低控制系统的复杂度。但由于pi控制可能对导致耦合抑制的效果有限,使其可能会存在稳态误差。有文献提出一种基于电流的预测控制器,虽然可以消除稳态误差,但其抗扰动能力较差。有文献提出了一种基于重复控制的复合控制方法,在一定程度上提升了暂态性能,但对谐波优化效果不佳,并且控制原理比较复杂。上述非线性控制方法中,模型预测控制和模糊控制虽然能够较好的处理非线性系统并且具有较好的鲁棒性,但是其计算量较大或者需要对数据训练的次数多,对模型的依赖度高并且还对设计者的主观经验有所依赖。而自抗扰控制(active disturbancerejection control,adrc)以扩张状态观测器为核心,不依赖系统的精确建模,在非线性系统中具有良好的应用前景。滑模控制具有快速收敛性和鲁棒性强而被广泛关注。
3、有文献提出将滑模控制和adrc结合的控制策略对永磁直线电机实现解耦控制,同时提升了系统的鲁棒性。有文献通过将改进型变速趋近律应用于微网逆变器的输出电压控制,加快了误差收敛的速度,降低了滑模运动中的抖振。传统adrc的核心为扩张状态观测器,用以估计系统状态和等效后的总扰动,但是其观测的速度和精度都有一定局限。
技术实现思路
1、本发明的目的是提供基于超螺旋滑模观测器的储能变流器改进自抗扰控制方法,解决了现有传统pi控制方法存在当储能变流器发生功率突变时暂态时间长以及存在耦合影响的问题。
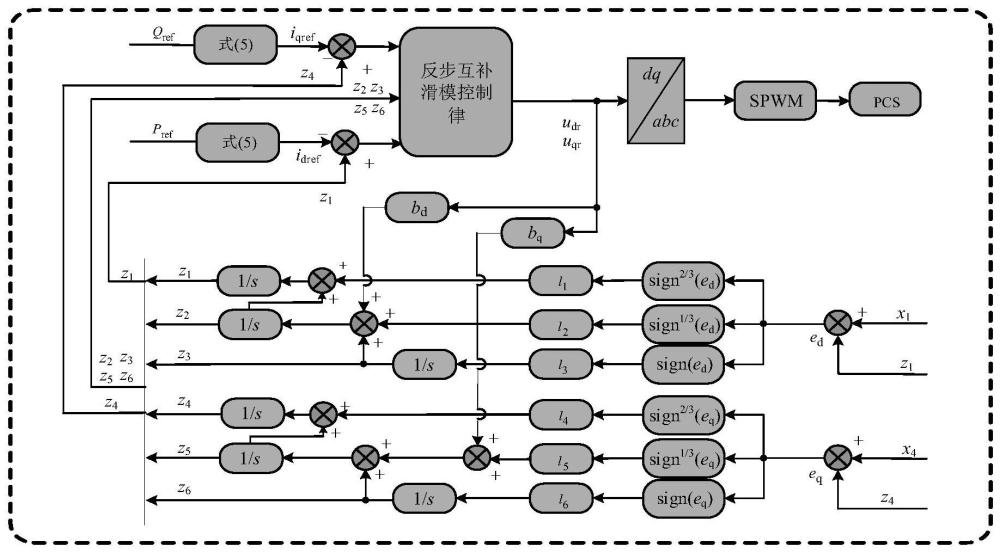
2、本发明所采用的技术方案是,基于超螺旋滑模观测器的储能变流器改进自抗扰控制方法,对储能变流器建立二阶非线性数学模型,在此基础上将其化为满足二阶自抗扰的范式,将扰动和系统的耦合部分等效为集总扰动,通过设计超螺旋滑模观测器对集总扰动进行观测补偿,然后设计反步互补滑模结合双幂次滑模趋近律作为反馈控制律。
3、本发明的特点还在于,
4、具体按照以下步骤实施:
5、步骤1、建立储能变流器数学模型;
6、步骤2、超螺旋滑模观测器设计;
7、步骤3、反步互补滑模控制器设计。
8、步骤1具体为:
9、储能系统包括储能电池、dc-ac变流器、滤波电路、负载和交流电网,储能电池为dc-ac变流器供电,变流器输出功率为负载供电,当变流器输出的功率不足负载所需时的功率缺额由电网补偿,当变流器输出的功率大于负载所需时多余的功率并网使用,同时也控制电网电能通过变流器向储能电池输电存储;
10、根据基尔霍夫定律得储能变流器在abc坐标系下的变量关系为:
11、
12、式(1)中,cdc为稳压电容,idc为稳压电容电流,ir为电池电流,ua、ub、uc为网侧三相电压,ia、ib、ic为网侧三相电流,uga、ugb、ugc为交流电网电压,l、c为滤波参数,r为滤波电感寄生参数,sj(j=a,b,c)为表征变流器中各桥臂开关管通断状态的开关函数,其具体内容如式(2)所示,
13、
14、将式(1)经过坐标变换得到dq坐标系下变流器交流侧微分方程为:
15、
16、式(3)中,ω为电网电压角频率,udr=sdudc,uqr=squdc,sd,,sq分别为d、q轴开关函数,ud,uq分别为d、q轴输入电压,id,iq分别为d、q轴输入电流。
17、步骤2具体为:
18、根据瞬时功率理论,可得到dq坐标系下交流侧瞬时功率为:
19、
20、式(4)中,ud,uq分别为d轴和q轴上的电网电压,id,iq分别为储能变流器交流测d轴和q轴的电流;
21、在给定功率参考值后,可由式(4)得到电流内环的参考值为:
22、
23、对式(3)求二阶导数并转换为二阶自抗扰的范式为:
24、
25、令状态变量x1=id,x4=iq,可进一步将式(6)表述为如下形式:
26、
27、式(7)中,bd、bq为控制量增益,fd、fq分别为d轴和q轴等效后的集总扰动,fd、fq具体形式为:
28、
29、根据式(7)设计超螺旋滑模观测器为:
30、
31、式(9)中,ed=x1-z1,eq=x4-z4,z1~6分别为x1~6的观测器估计值,k1~6>0,k1~6为观测器增益。
32、步骤3具体为:
33、记电流内环d、q轴电流id、iq与参考值的偏差为:
34、
35、对式(10)电流偏差求一阶导数得:
36、
37、构造lyapunov函数v1为:
38、v1=0.5ζ12 (12)
39、对v1求导得:
40、引入虚拟控制量ξ2使得:其中α为大于零的系数,因此则有:
41、为了使v1导满足lyapunov稳定性要求,需要使ξ2收敛至0,则根据滑模控制处于稳定时滑模函数会趋于零的特性,为ξ2设计滑模函数使其收敛至零;
42、在此采用互补滑模,设计广义滑模函数为:
43、
44、式(13)中,p为微分算子,η为常数;
45、则式(13)描述为:
46、
47、对式(14)求一阶导数得:
48、
49、设计空间中和sg1正交的互补滑模面为:
50、
51、对sc1求一阶导数得:
52、
53、由上式(13)~(17)得两个滑模面之间的关系为:其中s1=sg1+sc1;构造lyapunov函数为:
54、
55、对其求一阶导数得:
56、
57、使则互补滑模函数满足lyapunov稳定性要求;
58、由得出:
59、
60、由式(20)得到d轴电流内环等效控制律为:
61、
62、采用双幂次趋近律设计d轴电流内环切换控制律:
63、
64、式(22)中,l1,2>0,1<δ,0<γ<1;
65、由式(21)和式(22)得d轴综合控制律udr为:
66、udr=udreq+usw1 (23)
67、q轴电流内环的设计与d轴设计过程相同,q电流内环等效控制律为:
68、
69、q轴电流内环切换控制律为:
70、
71、q轴综合控制律uqr为:
72、uqr=uqreq+usw2(26)。
73、本发明的有益效果是:
74、本发明基于超螺旋滑模观测器的储能变流器改进自抗扰控制方法,以自抗扰理论为基础将系统状态方程化为自抗扰范式,将系统耦合项和内外扰动等不确定部分全部等效为集总扰动,通过观测器进行观测补偿,然后设计反步互补滑模控制律作为反馈提高系统误差收敛速度和精度,有效的抑制了功率之间的耦合并且缩短了暂态过渡时间、提高了系统的暂态性能。
- 还没有人留言评论。精彩留言会获得点赞!