一种提升机用直接电流控制切换无速度矢量控制的方法与流程
本发明涉及变频调速控制领域,具体涉及一种提升机用直接电流控制切换无速度矢量控制的方法。
背景技术:
1、提升机是通过势能进行运输的大型机械设备,用动力机械拖动柔性件钢丝绳及所运输的货物上下运动以完成运输过程,提升功率大,如矿井提升机、过坝提升机等。提升机在使用过程中,采用变频器对提升机进行控制可以节约电能,并且变频器的无速度矢量控制方式能够达到极高的效率、控制精度高,因此提升机大多采用无速度矢量控制运行。但在低速下由于观测器的不稳定性,导致异步电机在低速下转矩不稳定,容易造成电机失控,带来极大的经济损失甚至危害人的生命安全。而采用直接电流控制,能够在低速下平滑启动提升机的运行,不需要观测器进行观测,稳定性较高,但其效率不高,控制精度低。
技术实现思路
1、为解决上述弊端,本发明提出了一种提升机用直接电流控制切换无速度矢量控制的方法。
2、为实现以上目的,采用的技术方案是:
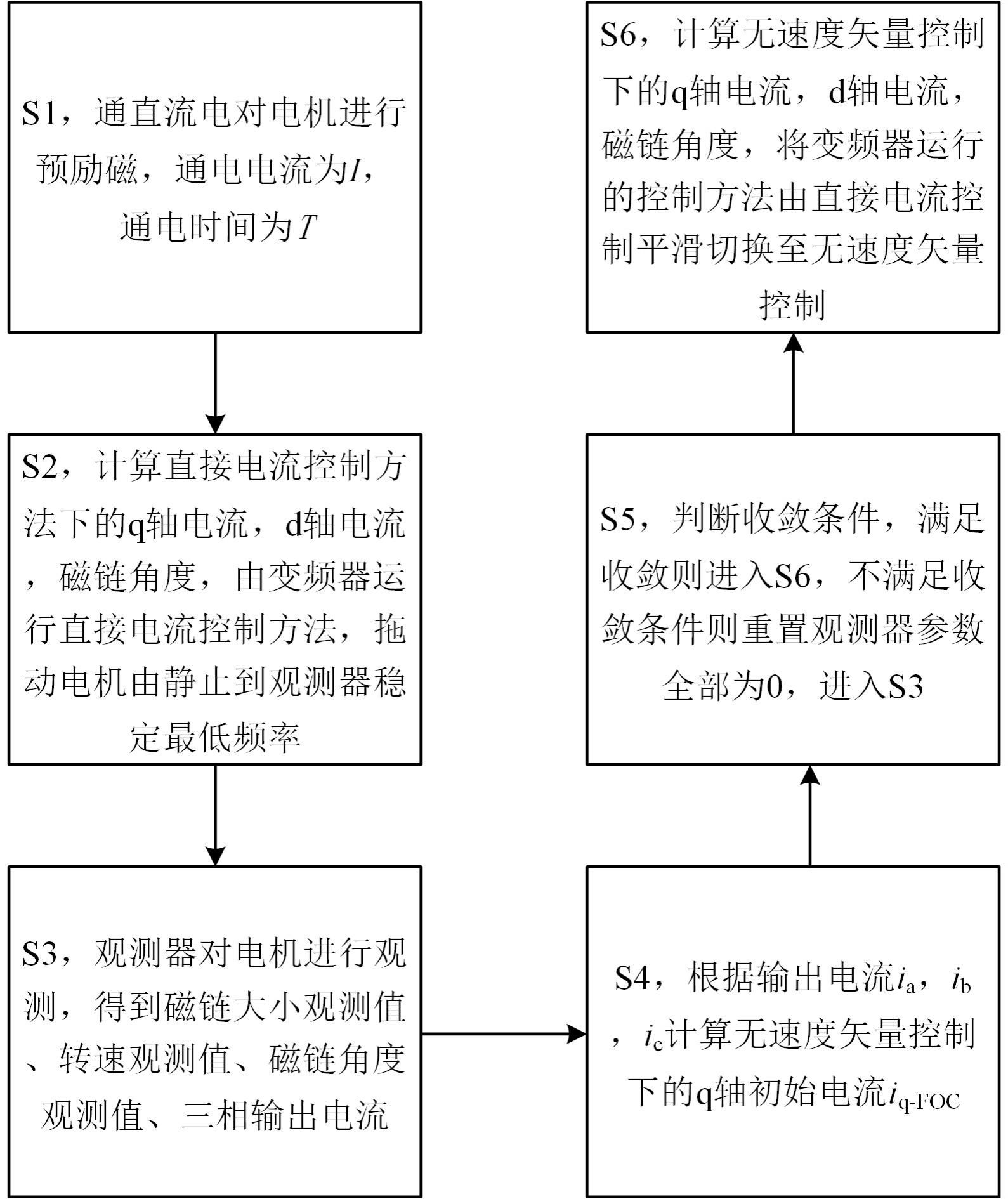
3、一种提升机用直接电流控制切换无速度矢量控制的方法,包括以下步骤:
4、s1,通直流电对电机进行预励磁,通电电流为 i,通电时间为 t;
5、s2,计算直接电流控制方法下的q轴电流,d轴电流,磁链角度,由变频器运行直接电流控制方法,拖动电机由静止到观测器稳定最低频率;
6、s3,投入观测器对电机进行观测并等待其稳定,得到磁链大小观测值,转速观测值,磁链角度观测值,三相输出电流,,;
7、s4,根据输出电流,,计算无速度矢量控制下的q轴初始电流;
8、s5,判断收敛条件,满足收敛则进入s6,不满足收敛条件则重置观测器参数全部为0,进入s3;
9、s6,计算无速度矢量控制下的q轴电流,d轴电流,磁链角度,将变频器运行的控制方法由直接电流控制平滑切换至无速度矢量控制。
10、进一步的,所述s1中,通电电流为 i计算公式如下:
11、,
12、其中, i为通电电流,为电机额定磁链,为电机互感;
13、通电时间 t计算公式如下:
14、,
15、其中, t为通电时间,为电机转子时间常数。
16、进一步的,所述s2中,直接电流控制方法下的q轴电流,d轴电流,磁链角度的计算如下:
17、,
18、其中,为直接电流控制方法下的旋转坐标系q轴电流,为直接电流控制方法下的旋转坐标系d轴电流,为电机额定电流,为直接电流控制方法下的磁链角度,为设定频率,为积分符号, d为微分算子, t为时间。
19、进一步的,所述s4中,无速度矢量控制下的q轴初始电流计算公式如下:
20、,
21、其中,为无速度矢量控制下的d轴初始电流,为无速度矢量控制下的q轴初始电流,为磁链角度观测值,,,为三相输出电流,cos为余弦三角函数,sin为正弦三角函数。
22、进一步的,所述s5中,收敛条件如下:
23、直接电流控制下由观测器观测到的磁链大小观测值,转速观测值与磁链大小理论值,观测器稳定最低频率相比较,误差不大10%,即磁链大小观测值满足以下条件:
24、,
25、其中,为观测器稳定最低频率,为磁链大小观测值。
26、进一步的,所述s6中,无速度矢量控制下的q轴电流,d轴电流,磁链角度计算如下:
27、,
28、其中,为无速度矢量控制下的旋转坐标系q轴电流,为比例系数,为积分常数,为设定频率,为转速观测值,为积分符号, d为微分算子, t为时间,为无速度矢量控制下的旋转坐标系d轴电流,为磁链大小理论值,为电机互感,为无速度矢量控制下的磁链角度,为磁链角度观测值,为无速度矢量控制下的q轴初始电流。
29、与现有技术相比,本发明优势在于:
30、(1)提升机能够稳定启动,并且在低速运行时稳定性较高;
31、(2)高速时控制精度高、节省电能、效率高等,具有广泛实用价值。
技术特征:
1.一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述s1中,通电电流为i计算公式如下:
3.根据权利要求1所述的一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述s2中,直接电流控制方法下的q轴电流,d轴电流,磁链角度的计算如下:
4.根据权利要求1所述的一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述s4中,无速度矢量控制下的q轴初始电流计算公式如下:
5.根据权利要求1所述的一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述s5中,收敛条件如下:
6.根据权利要求1所述的一种提升机用直接电流控制切换无速度矢量控制的方法,其特征在于,所述s6中,无速度矢量控制下的q轴电流,d轴电流,磁链角度计算如下:
技术总结
本发明提出了一种提升机用直接电流控制切换无速度矢量控制的方法,首先向电机中通入直流电流实现预励磁,之后采用直接电流控制启动变频器,拖动电机由静止加速到观测器稳定最低频率后,由观测器对电机进行观测,得到磁链大小观测值,转速观测值,磁链角度观测值。当判断观测值满足收敛条件后,将变频器由直接电流控制切换至无速度矢量控制。本发明通过引入直接电流控制,有效解决了异步感应电机观测器在低频段固有的失稳问题,防止电机失控,保证提升机在低速下的平滑启动;通过直接电流控制与无速度矢量控制的切换,保证了高速下的控制精度与运行效率,具有广泛实用价值。
技术研发人员:张树林,宋玉明,张正松
受保护的技术使用者:希望森兰科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!