转动惯量辨识的数据处理方法和装置与流程
本发明涉及伺服系统,尤其是涉及转动惯量辨识的数据处理方法和装置。
背景技术:
1、伺服系统在运行过程中,由于负载大小或重心的变化,使得电机轴端负载转动惯量发生改变。当伺服系统速度环和位置环参数与负载转动惯量不匹配时,容易造成伺服系统动态性能恶化,如位置跟随误差增大,系统震荡等。因此,伺服系统应该具有在运行过程中实时辨识负载转动惯量的能力。目前常见的负载转动惯量辨识方法包括递推最小二乘法、扩展卡尔曼滤波器法和模型参考自适应法等。
2、这些方法都是基于电机的运动方程来建立负载转动惯量递推模型,通过连续计算电机电磁转矩和转速来输入到负载转动惯量递推模型,从而获得实时的负载转动惯量值。
3、电机运动方程如公式(1)所示:
4、
5、其中,j与电机加速度乘积,因此可在电机加减速过程中对j进行辨识。此外,ωm可根据编码器反馈的电机位置值微分得到;te等于电机q轴电流iq乘以j一个固定的转矩系数kt(以后将这种计算te的方法简称为固定kt法)。然后将ωm和te送入负载转动惯量递推模型内计算,从而得到实时的转动惯量值。
6、te和ωm作为转动惯量递推模型的输入,两者的计算精度与负载转动惯量的辨识准确与否息息相关,可以对te的计算精度进行改善,关于te的计算,目前常采用固定kt法计算得到。参照公式(2):
7、te=iq*kt (2)
8、上述方法虽然简单易行,但是未考虑伺服电机磁路饱和对转矩系数kt大小的影响。伺服系统在实际运行过程中,为增加系统动态响应和带载能力,伺服电机普遍具有三倍过载能力,即伺服电机在加减速过程中可短时输出最大三倍额定转矩。
9、当电机电流iq小于电机额定电流irate时,此时iq与te呈现线性关系,即但考虑伺服电机在加减速时常常处于过载状态,即iq>=irate。此时伺服电机磁路处于深度饱和状态,实际kt值会随着伺服电机磁路饱和程度的增加而下降。
10、综上,固定的kt值无法准确描述伺服电机加减速过程中,特别是伺服电机过载状态下iq和te之间的关系,从而造成负载转动惯量辨识精度的下降。
技术实现思路
1、有鉴于此,本发明的目的在于提供转动惯量辨识的数据处理方法和装置,可以在实时负载转动惯量辨识过程中提供更加精确的电磁转矩值,从而提高负载转动惯量辨识的精度。
2、第一方面,本发明实施例提供了转动惯量辨识的数据处理方法,所述方法包括:
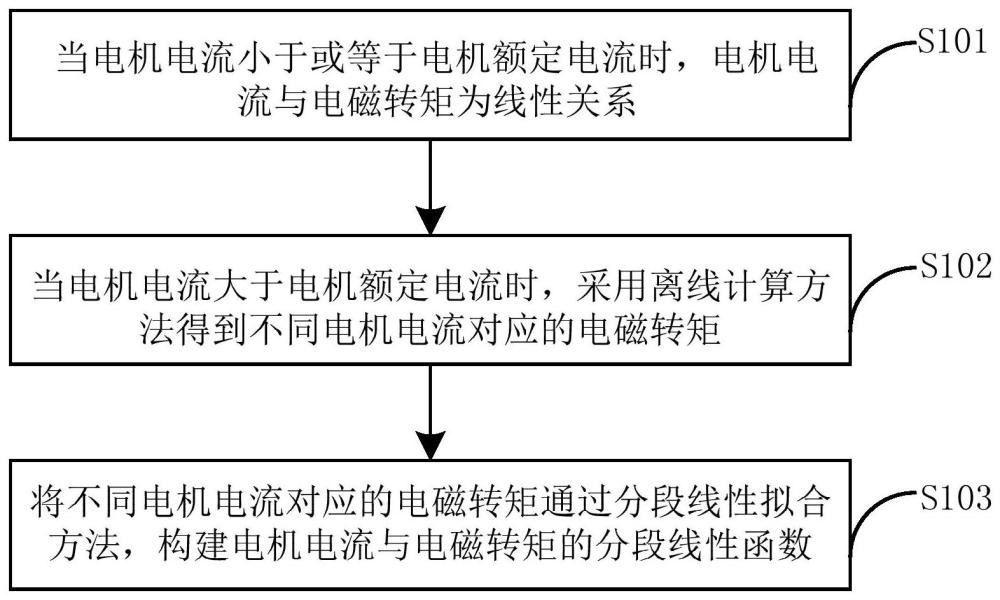
3、当电机电流小于或等于电机额定电流时,所述电机电流与电磁转矩为线性关系;
4、当所述电机电流大于所述电机额定电流时,采用离线计算方法得到不同电机电流对应的电磁转矩;
5、将所述不同电机电流对应的电磁转矩通过分段线性拟合方法,构建所述电机电流与所述电磁转矩的分段线性函数。
6、进一步的,采用离线计算方法得到不同电机电流对应的电磁转矩,包括:
7、当电机的工作模式为力矩闭环、空载或静止时,增大目标电流至第一电流阈值时,通过转矩测量仪测量所述电机轴端输出转矩,其中,所述第一电流阈值与所述电机额定电流的比值为3;
8、将所述目标电流作为所述电机电流,将所述电机轴端输出转矩作为所述电磁转矩;
9、当所述电机电流为不同电流时,对应相应的所述电磁转矩。
10、进一步的,当所述电机电流为不同电流时,对应相应的所述电磁转矩,包括:
11、当所述电机电流为所述电机额定电流时,对应第一电磁转矩;
12、当所述电机电流为第二电流阈值时,对应第二电磁转矩,其中,所述第二电流阈值与所述电机额定电流的比值为2;
13、当所述电机电流为所述第一电流阈值时,对应第三电磁转矩。
14、进一步的,将所述不同电机电流对应的电磁转矩通过分段线性拟合方法,构建所述电机电流与所述电磁转矩的分段线性函数,包括:
15、将所述电机额定电流、所述第二电流阈值、所述第一电磁转矩和所述第二电磁转矩输入一次函数中,得到第一系数和第二系数;
16、根据所述第一系数和所述第二系数,得到第一分段的线性函数,其中,所述第一分段为所述电机额定电流至所述第二电流阈值之间的范围;
17、将所述第二电流阈值、所述第二电磁转矩、所述第一电流阈值和所述第三电磁转矩输入所述一次函数中,得到第三系数和第四系数;
18、根据所述第三系数和所述第四系数,得到第二分段的线性函数,其中,所述第二分段为所述第二电流阈值至所述第一电流阈值之间的范围。
19、第二方面,本发明实施例提供了转动惯量辨识的数据处理装置,所述装置包括:
20、线性模块,用于当电机电流小于或等于电机额定电流时,所述电机电流与电磁转矩为线性关系;
21、离线计算模块,用于当所述电机电流大于所述电机额定电流时,采用离线计算方法得到不同电机电流对应的电磁转矩;
22、分段线性拟合模块,用于将所述不同电机电流对应的电磁转矩通过分段线性拟合方法,构建所述电机电流与所述电磁转矩的分段线性函数。
23、进一步的,所述离线计算模块具体用于:
24、当电机的工作模式为力矩闭环、空载或静止时,增大目标电流至第一电流阈值时,通过转矩测量仪测量所述电机轴端输出转矩,其中,所述第一电流阈值与所述电机额定电流的比值为3;
25、将所述目标电流作为所述电机电流,将所述电机轴端输出转矩作为所述电磁转矩;
26、当所述电机电流为不同电流时,对应相应的所述电磁转矩。
27、进一步的,所述离线计算模块具体用于:
28、当所述电机电流为所述电机额定电流时,对应第一电磁转矩;
29、当所述电机电流为第二电流阈值时,对应第二电磁转矩,其中,所述第二电流阈值与所述电机额定电流的比值为2;
30、当所述电机电流为所述第一电流阈值时,对应第三电磁转矩。
31、进一步的,所述分段线性拟合模块具体用于:
32、将所述电机额定电流、所述第二电流阈值、所述第一电磁转矩和所述第二电磁转矩输入一次函数中,得到第一系数和第二系数;
33、根据所述第一系数和所述第二系数,得到第一分段的线性函数,其中,所述第一分段为所述电机额定电流至所述第二电流阈值之间的范围;
34、将所述第二电流阈值、所述第二电磁转矩、所述第一电流阈值和所述第三电磁转矩输入所述一次函数中,得到第三系数和第四系数;
35、根据所述第三系数和所述第四系数,得到第二分段的线性函数,其中,所述第二分段为所述第二电流阈值至所述第一电流阈值之间的范围。
36、第三方面,本发明实施例提供了电子设备,包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法。
37、第四方面,本发明实施例提供了具有处理器可执行的非易失的程序代码的计算机可读介质,所述程序代码使所述处理器执行如上所述的方法。
38、本发明实施例提供了转动惯量辨识的数据处理方法和装置,包括:当电机电流小于或等于电机额定电流时,电机电流与电磁转矩为线性关系;当电机电流大于电机额定电流时,采用离线计算方法得到不同电机电流对应的电磁转矩;将不同电机电流对应的电磁转矩通过分段线性拟合方法,构建电机电流与电磁转矩的分段线性函数;可以在实时负载转动惯量辨识过程中提供更加精确的电磁转矩值,从而提高负载转动惯量辨识的精度。
39、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
40、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!