复合重复控制器的三相四桥臂逆变器控制系统及控制方法与流程
本技术涉及电力电子设备,尤其涉及一种复合重复控制器的三相四桥臂逆变器控制系统及控制方法。
背景技术:
1、随着新能源与可再生能源的快速发展,无论是大规模集中式发电还是分布式发电,都需要通过整流器或者逆变器来控制。由于新能源系统的分散性和随机性,集中供电方式已无法满足实际需求,因此人们开始越来越重视分布式供电系统。在这种系统中,发电设备所产生的电能经过电力电子变换设备处理后,可以直接提供给负载,从而大幅减少了电力传输损耗。逆变器是电力电子设备的关键部分,直接影响着系统可靠性与电能质量优劣。并且在分布式系统中,负载情况更加复杂,包括单相带载或多相不平衡负载等情况。
2、三相四桥臂逆变器是一种高效率、高可靠性、高性能的电力电子器件,其中,基于双闭环控制方法是常用的控制方法之一,它可以实现三相输出电压和电流的稳定控制,但同时也存在带不平衡负载及非线性负载能力差,输出电压谐波含量高,系统动态及稳态性能一般等问题。在三相四桥臂逆变器带不平衡负载时,输出电流和电压会出现不对称现象,会对逆变器的性能和稳定性产生一定的影响。
技术实现思路
1、本技术提供一种复合重复控制器的三相四桥臂逆变器控制系统及控制方法,以解决逆变器带不平衡负载及非线性负载能力差的问题。
2、本技术第一方面提供一种复合重复控制器的三相四桥臂逆变器控制系统,包括:采集模块、双同步解耦坐标系模块以及复合控制器;所述复合控制器分别与所述双同步解耦坐标系模块和所述采集模块电连接;所述双同步解耦坐标系模块和所述采集模块分别与三相四桥臂逆变器电连接;所述复合控制器被配置为:
3、控制所述采集模块采集所述三相四桥臂逆变器输出侧的不对称电压矢量、不对称电流矢量以及输出侧的相位角;
4、根据所述相位角将所述不对称电压矢量和所述不对称电流矢量在所述双同步解耦坐标系模块中解耦,以分解成第一预设角速度旋转的正序电压分量和正序电流分量以及第二预设角速度旋转的负序电压分量和负序电流分量;
5、根据所述正序电压分量、所述正序电流分量、所述负序电压分量以及所述负序电流分量,建立旋转坐标系电路模型;
6、根据所述旋转坐标系电路模型,生成参考电压;
7、根据单极性正弦脉宽调制法调制所述参考电压,以生成控制所述三相四桥臂逆变器的开关信号。
8、通过所述双同步解耦坐标系模块将从所述采集模块采集的电压值和/或电流值分解成正、负旋转坐标系下的电压分量值和/或电流分量值,再采用所述复合控制器进行控制,使所述三相四桥臂逆变器能够快速、稳定输出三相交流电压,进而能够稳定的带不平衡负载及非线性负载,减少输出电压谐波含量,提高系统的动态及稳态性能。
9、可选的,所述复合控制器包括重复控制器和pi调节器,所述重复控制器和所述pi调节器并联。
10、所述重复控制器和所述pi调节器通过不断修正输出电压,可以实现高精度的输出波形,降低波形偏差。
11、可选的,所述重复控制器的输入输出传递函数为:
12、
13、其中,z-n为周期延时环节;kr为比例因数;zk为超前环节;s(z)为二阶滤波器;q(z)为低通滤波器或经验常数。
14、通过所述重复控制器的输入输出传递函数可以有效地减小逆变器输出电压中的谐波成分,从而改善电压质量。
15、可选的,所述采集模块包括电压采集模块、电流采集模块以及相角测量模块。
16、所述电压采集模块、所述电流采集模块以及所述相角测量模块分别与所述复合控制器电连接;所述电压采集模块、所述电流采集模块以及所述相角测量模块分别与三相四桥臂逆变器电连接。
17、所述电压采集模块用于采集所述三相四桥臂逆变器输出侧的电压,所述电流采集模块用于采集所述三相四桥臂逆变器输出侧的电流,所述相角测量模块用于采集输出侧的相位角。
18、可选的,所述双同步解耦坐标系模块包括正旋转坐标系模块和负旋转坐标系模块;所述正旋转坐标系模块和所述负旋转坐标系模块的旋转角度相反;
19、所述正旋转坐标系模块用于将所述不对称电压矢量和所述不对称电流矢量分解成所述正序电压分量和所述正序电流分量;
20、所述负旋转坐标系模块用于将所述不对称电压矢量和所述不对称电流矢量分解成所述负序电压分量和所述负序电流分量。
21、通过所述正旋转坐标系模块和所述负旋转坐标系模块可实现不对称电压矢量和/或电流矢量在两个不同旋转坐标系中的分离。
22、可选的,所述双同步解耦坐标系模块内部设有若干个滤波模块;所述滤波模块为低通高阻滤波器。
23、所述低通高阻滤波器可减少谐波影响,进而提高同步锁相的精度。
24、可选的,所述三相四桥臂逆变器包括正极稳压电容、负极稳压电容、第一桥臂、第二桥臂、第三桥臂以及中性线桥臂;
25、所述正极稳压电容的一端与直流侧母线正极连接,所述正极稳压电容的另一端与所述负极稳压电容的一端连接;所述负极稳压电容的另一端与直流侧母线负极连接;所述第一桥臂、所述第二桥臂、所述第三桥臂以及所述中性线桥臂并联;所述第一桥臂、所述第二桥臂、所述第三桥臂以及所述中性线桥臂均包括:第一电力电子开关管、第二电力电子开关管、第三电力电子开关管以及第四电力开关管;所述第一电力电子开关管的漏极与所述直流侧母线正极连接;所述第二电力电子开关管的源极与所述第三电力电子开关管的源极连接,所述第二电力电子开关管的漏极连接在所述正极稳压电容和所述负极稳压电容之间,所述第三电力电子开关管的漏极与所述第一电力电子开关管的源极连接;所述第四电力电子开关管的漏极与所述第一电力电子开关管的源极连接,所述第四电力电子开关管的源极与所述直流侧母线负极连接。
26、所述三相四桥臂逆变器用于将直流电能转换为交流电能,其中,所述中性线桥臂为零序电流提供通路,可抑制零序分量的存在,进而只需获取正序和负序两个分量即可,简化控制步骤。
27、可选的,所述三相四桥臂逆变器还包括滤波电路;所述第一桥臂、所述第二桥臂、所述第三桥臂均通过所述滤波电路连接负载;所述滤波电路包括滤波电容和滤波电感,所述滤波电感的一端与所述第一电力电子开关管的源极连接,所述滤波电感的另一端与负载连接,所述滤波电容并联在所述负载两端。
28、所述滤波电路用于将所述第一桥臂、所述第二桥臂、所述第三桥臂中特定频率的频点或该频点以外的频率进行有效滤除。
29、可选的,所述三相四桥臂逆变器还包括平波电感;所述平波电感的两端分别连接所述负载和所述中性线桥臂。
30、所述平波电感用于起到平波作用。
31、本技术第二方面提供一种复合重复控制器的三相四桥臂逆变器控制方法,应用于第一方面所述的复合重复控制器的三相四桥臂逆变器控制系统,所述方法包括:
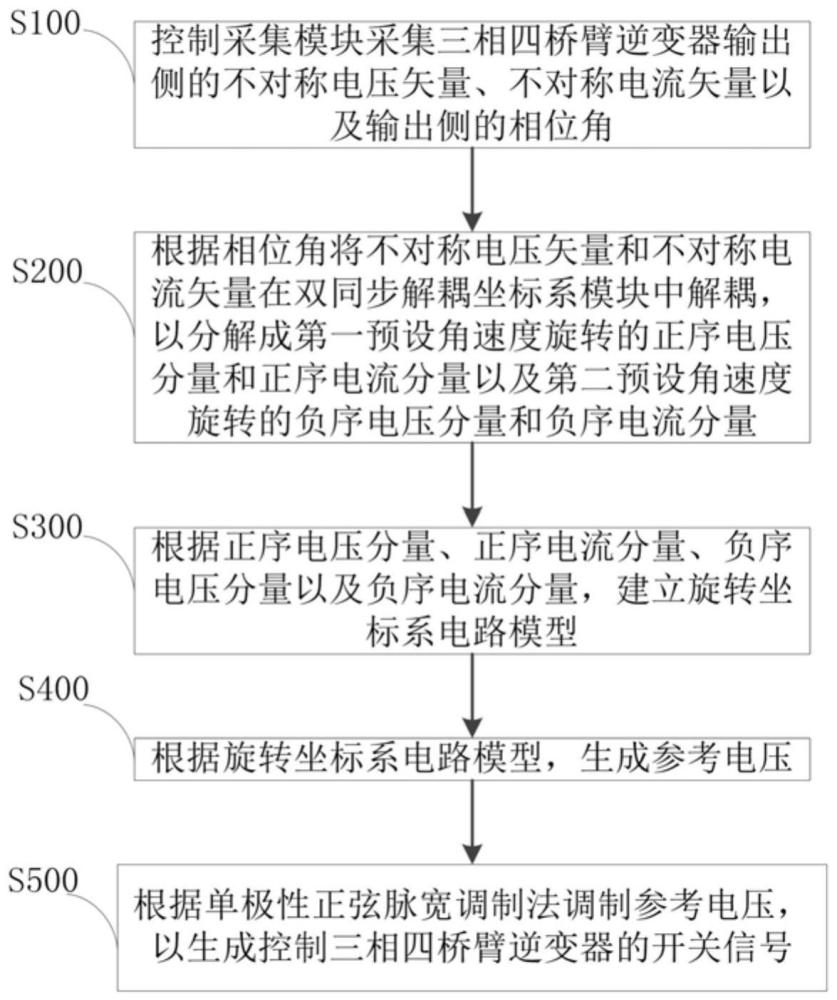
32、控制采集模块采集三相四桥臂逆变器输出侧的不对称电压矢量、不对称电流矢量以及输出侧的相位角;
33、根据所述相位角将所述不对称电压矢量和所述不对称电流矢量在双同步解耦坐标系模块中解耦,以分解成第一预设角速度旋转的正序电压分量和正序电流分量以及第二预设角速度旋转的负序电压分量和负序电流分量;
34、根据所述正序电压分量、所述正序电流分量、所述负序电压分量以及所述负序电流分量,建立旋转坐标系电路模型;
35、根据所述旋转坐标系电路模型,生成参考电压;
36、根据单极性正弦脉宽调制法调制所述参考电压,以生成控制所述三相四桥臂逆变器的开关信号。
37、上述方法通过所述双同步解耦坐标系模块将从所述采集模块采集的电压电流值分解成正、负旋转坐标系下的电压电流分量值,再采用所述复合控制器进行控制,使所述三相四桥臂逆变器能够快速、稳定输出三相交流电压,进而能够稳定的带不平衡负载及非线性负载,减少输出电压谐波含量,提高系统的动态及稳态性能。
38、由以上技术方案可知,本技术提供一种复合重复控制器的三相四桥臂逆变器控制系统及控制方法,所述复合重复控制器的三相四桥臂逆变器控制系统包括:采集模块、双同步解耦坐标系模块以及复合控制器;所述复合控制器分别与所述双同步解耦坐标系模块和所述采集模块电连接;所述双同步解耦坐标系模块和所述采集模块分别与三相四桥臂逆变器电连接;所述复合控制器控制所述采集模块采集所述三相四桥臂逆变器输出侧的不对称电压矢量、不对称电流矢量以及输出侧的相位角;根据所述相位角将所述不对称电压矢量和所述不对称电流矢量在所述双同步解耦坐标系模块中解耦,以分解成第一预设角速度旋转的正序电压分量和正序电流分量以及第二预设角速度旋转的负序电压分量和负序电流分量;根据所述正序电压分量、所述正序电流分量、所述负序电压分量以及所述负序电流分量,建立旋转坐标系电路模型;根据所述旋转坐标系电路模型,生成参考电压;根据单极性正弦脉宽调制法调制所述参考电压,以生成控制所述三相四桥臂逆变器的开关信号,以解决逆变器带不平衡负载及非线性负载能力差的问题。
- 还没有人留言评论。精彩留言会获得点赞!