机器人充电控制装置及机器人的制作方法
本发明涉及机器人充电控制,特别涉及一种机器人充电控制装置及机器人。
背景技术:
1、现有的机器人自动回充过程中机器人电极与充电桩电极接触瞬间会存在接触不稳定的情况,或者电极接触瞬间对机器人容性负载充电引起的大电流导致打火现象的发生,打火后留下的痕迹会更加剧接触不稳定问题。
技术实现思路
1、本发明的主要目的是提供一种机器人充电控制装置及机器人,旨在改善机器人自动回充过程中双电源切换损耗问题,同时解决了双电源切换过程中由于电极之间接触不稳定出现打火现象的问题。
2、为实现上述目的,本发明提出了一种机器人充电控制装置,所述机器人包括充电电压接入端和用于接入充电电压的自动充电接口和手动充电接口,所述机器人充电控制装置包括:
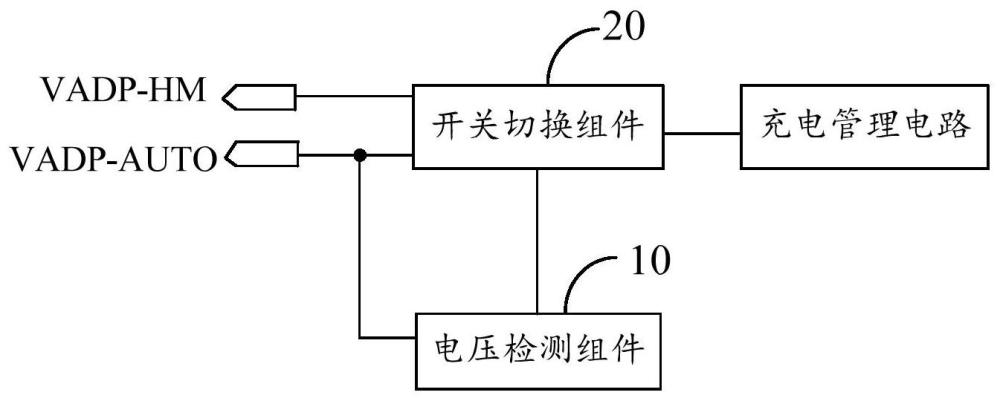
3、电压检测组件,所述电压检测组件与所述自动充电接口电连接;
4、开关切换组件,所述开关切换组件的第一输入端与所述自动充电接口电连接,所述开关切换组件的第二输入端与所述手动充电接口电连接,所述开关切换组件的输出端与充电管理电路电连接;所述开关切换组件,用于导通所述开关切换组件的第二输入端与输出端之间的通路;
5、其中,所述电压检测组件,用于在检测到所述自动充电接口接入充电电压时,控制所述开关切换组件工作,以使其从导通所述开关切换组件的第二输入端与输出端之间的通路切换至导通所述开关切换组件的第一输入端与输出端之间的通路。
6、可选的,所述电压检测组件集成于继电器内,所述电压检测组件为所述继电器的受控线圈,所述继电器包括常开触点和常闭触点,所述常开触点的第一端与所述自动充电接口电连接,所述常闭触点的第一端与所述手动充电接口电连接,所述常开触点的第二端和所述常闭触点的第二端为所述继电器的输出端;
7、所述受控线圈,用于在所述自动充电接口接入充电电压时,控制所述常开触点闭合,常闭触点打开,以导通自动充电接口与所述继电器的输出端之间的通路,关断所述手动充电接口与所述继电器的输出端之间的通路。
8、可选的,所述电压检测组件包括:
9、主控电路,所述主控电路与所述开关切换组件电连接;
10、电压检测电路,所述电压检测电路的输出端与所述主控电路电连接;并用于在检测到所述自动充电接口接入充电电压时,输出电压检测信号至所述主控电路,以使所述主控电路控制所述开关切换组件工作。
11、可选的,所述充电电压接入端包括正极输入端和负极输入端,所述机器人充电控制装置还包括:
12、防反接电路,所述防反接电路的第一端与所述自动充电接口电连接,所述防反接电路的第二端与所述开关切换组件的第一输入端电连接;
13、所述防反接电路,用于在所述正极输入端与所述自动充电接口电连接时,导通所述自动充电接口与所述开关切换组件之间的通路;以及用于在所述负极输入端与所述自动充电接口电连接时,关断所述自动充电接口与所述开关切换组件之间的通路。
14、可选的,所述机器人充电控制装置包括:
15、第一提示电路,所述第一提示电路与所述自动充电接口电连接;并用于在所述自动充电接口接入充电电压时工作;
16、第二提示电路,所述第二提示电路与所述手动充电接口电连接;并用于在所述手动充电接口接入充电电压时工作。
17、可选的,所述机器人还包括供电端和电池,所述机器人充电控制装置还包括:
18、第一开关电路,所述第一开关电路的输入端与所述充电电压接入端电连接,所述第一开关电路的输出端为所述供电端,所述第一开关电路的受控端与所述电池电连接;
19、第二开关电路,所述第二开关电路的输入端与所述电池电连接,所述第二开关电路的输出端为所述供电端,所述第二开关电路的受控端与所述充电电压接入端电连接;
20、所述第一开关电路,用于在所述第一开关电路的输入端接入充电电压时,导通所述第一开关电路的输入端与所述供电端之间的通路,关断所述第二开关电路的输入端与所述供电端之间的通路;
21、所述第二开关电路,用于在所述第二开关电路的输入端接入充电电压时,导通所述第二开关电路的输入端与所述供电端之间的通路,关断所述第一开关电路的输入端与所述供电端之间的通路。
22、可选的,所述第一开关电路包括:
23、第一单向导通电路,所述第一单向导通电路的第一端与所述电池电连接;
24、第一开关管,所述第一开关管的第一端与所述充电电压接入端电连接,所述第一开关管的受控端与所述第一单向导通电路的第二端电连接;
25、第一分压电路,所述第一分压电路的第一端与所述第一开关管的第二端电连接,所述第一分压电路的第二端接地。
26、可选的,所述第一单向导通电路为二极管,所述第一单向导通电路的阳极与所述电池电连接,所述第一开关管为p沟道mos管,所述第一开关管的漏极与所述充电电压接入端电连接,所述第一开关管的源极为所述供电端;所述第一开关管的栅极与所述第一单向导通电路的阴极电连接;
27、所述第一分压电路包括:
28、第一电阻,所述第一电阻的第一端与所述第一开关管的源极电连接;
29、第二电阻,所述第二电阻的第一端与所述第一电阻的第二端电连接,所述第一电阻与所述第二电阻的公共连接端与所述第一单向导通电路的阴极电连接,所述第二电阻的第二端接地。
30、可选的,所述第二开关电路包括:
31、第二单向导通电路,所述第二单向导通电路的第一端与所述充电电压接入端电连接;
32、第二开关管,所述第二开关管的漏极与所述电池电连接,所述第二开关管的栅极与所述第二单向导通电路的第二端电连接;
33、第二分压电路,所述第二分压电路的第一端与所述第二开关管的源极电连接,所述第二分压电路的第二端接地。
34、可选的,所述第二单向导通电路为二极管,所述第二单向导通电路的阳极与所述充电电压接入端电连接,所述第二开关管为p沟道mos管,所述第二开关管的漏极与所述电池电连接,所述第二开关管的源极为所述供电端,所述第二开关管的栅极与所述第二单向导通电路的阴极电连接;
35、所述第二分压电路包括:
36、第三电阻,所述第三电阻的第一端与所述第二开关管的源极电连接;
37、第四电阻,所述第四电阻的第一端与所述第三电阻的第二端电连接,所述第三电阻与所述第四电阻的公共连接端与所述第二单向导通电路的阴极电连接,所述第四电阻的第二端接地。
38、本发明还提出了一种机器人,所述机器人包括上述任一项所述的机器人充电控制装置。
39、本发明提出了一种机器人充电控制装置,机器人包括充电电压接入端和用于接入充电电压的自动充电接口和手动充电接口,所述机器人充电控制装置包括电压检测组件和开关切换组件,电压检测组件与自动充电接口电连接;开关切换组件的第一输入端与自动充电接口电连接,开关切换组件的第二输入端与手动充电接口电连接,开关切换组件的输出端与充电管理电路电连接;开关切换组件用于导通开关切换组件的第二输入端与输出端之间的通路;其中,电压检测组件在检测到自动充电接口接入充电电压时,控制开关切换组件工作,以使其从导通开关切换组件的第二输入端与输出端之间的通路切换至导通开关切换组件的第一输入端与输出端之间的通路。
40、在实际应用中,当机器人自动回充的过程中,电压检测组件检测到自动充电接口接入充电电压时,即机器人电极与充电桩电极接触稳定时,电压检测组件控制开关切换组件从导通开关切换组件的第二输入端与输出端之间的通路切换至导通开关切换组件的第一输入端与输出端之间的通路,如此,完成了从手动充电到自动充电的切换,避免了打火现象的发生,同时,避免了当手动充电接口和自动充电接口同时接入充电器时,对充电器造成损坏,提高了本发明机器人充电控制装置的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!