逆变器控制方法及逆变器控制系统与流程
本发明涉及半导体,特别涉及一种逆变器控制方法及逆变器控制系统。
背景技术:
1、随着电力电子技术的快速发展,以逆变装置为主要结构的三相逆变系统得到广泛应用。三相逆变系统是通过spwm(sinusoidal pulse width modulation,正弦脉宽调制)、svpwm(space vector pulse width modulation,空间矢量脉宽调制)等控制方法把直流电转变成交流电的电力电子系统,其广泛应用于通信、工厂和企业不间断电源系统。
2、逆变装置的电流检测是控制系统中重要的反馈环节,关系到逆变装置的矢量控制性能和限流保护能力。三相逆变系统需要在全调制比范围内精确获得三相相电流,才能实时调整三相逆变器的最优控制状态。
3、现有的三相逆变器控制方法包括以下几种:第一种是在三相逆变器的相线上安装隔离式电流传感器(例如霍尔传感器),对相线的电流进行直接采样,这种方法的缺点是传感器的成本太高,对于一些性价比要求高的系统来说无法接受。第二种是在三相逆变器的三相桥臂的下桥臂上分别安装采样电阻进行相电流采样,这种方法的缺点是采样通道多,占用的资源较大。第三种是在直流母线串联采样电阻进行峰值电流采样重构出三相电流,因为三相电流最终都会通过直流母线,所以直流母线的电流可以准确反映出三相电流的变化,这种方法虽然可以重构出三相电流,并且采样通道少,但是其在扇区边界和低调制比范围内对三相电流的可采样重构区域太窄,尤其是在超低调制比时,有效电压矢量较短,根本无法获得准确的三相电流。
技术实现思路
1、鉴于上述问题,本发明的目的在于提供一种逆变器控制方法及逆变器控制系统,通过对pwm驱动信号移相,以满足采样需求。
2、根据本发明的一方面,提供一种逆变器控制方法,其中,所述控制方法包括:生成多相pwm驱动信号;设置最小采样时间值;基于所述最小采样时间值对pwm驱动信号移相;以及以移相之后的pwm驱动信号驱动逆变器;其中,移相过程中,多相pwm驱动信号的脉宽不变;移相之后,多相pwm驱动信号中相对超前的两相驱动信号的上升沿之间的时间间隔大于或等于最小采样时间值,多相pwm驱动信号中相对滞后的两相驱动信号的下降沿之间的时间间隔大于或等于最小采样时间值。
3、可选地,所述pwm驱动信号包括第一相驱动信号,第二相驱动信号以及第三相驱动信号,移相的方法包括:固定所述第一相驱动信号的上升沿和下降沿中的任一边沿,并且基于所述第一相驱动信号的固定边沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的另一边沿;以及基于所述第一相驱动信号的固定边沿,逐相移动所述第二相驱动信号和所述第三相驱动信号的上升沿以及下降沿。
4、可选地,固定所述第一相驱动信号的下降沿,并且基于所述第一相驱动信号的下降沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的上升沿。
5、可选地,所述第二相驱动信号的移相方法包括:设置所述第二相驱动信号的下降沿,使得所述第二相驱动信号的下降沿时刻与所述第一相驱动信号的下降沿时刻之间的时间间隔为最小采样时间值,且所述第二相驱动信号的下降沿相对所述第一相驱动信号的下降沿超前,并且固定所述第二相驱动信号的下降沿;基于所述第二相驱动信号的下降沿时刻以及所述第二相驱动信号的脉宽固定所述第二相驱动信号的上升沿。
6、可选地,所述第三相驱动信号的移相方法包括:比较所述第一相驱动信号和所述第二相驱动信号的上升沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中上升沿相对超前的一相驱动信号作为第一基准驱动信号;设置所述第三相驱动信号的上升沿,使得所述第三相驱动信号的上升沿时刻与所述第一基准驱动信号的上升沿时刻之间的时间间隔为最小采样时间值,且所述第三相驱动信号的上升沿相对所述第一基准驱动信号的上升沿超前;比较所述第一相驱动信号和所述第二相驱动信号的下降沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中下降沿相对超前的一相驱动信号为第二基准驱动信号;比较所述第三相驱动信号和第二基准驱动信号的下降沿时刻,所述第三相驱动信号的下降沿相对所述第二基准驱动信号的下降沿超前时,直接固定所述第三相驱动信号的上升沿和下降沿;所述第三相驱动信号的下降沿相对所述第二基准驱动信号的下降沿滞后时,再次对所述第三相驱动信号移相,使得所述第三相驱动信号的下降沿与所述第二基准驱动信号的下降沿齐平,之后固定所述第三相驱动信号的上升沿和下降沿。
7、可选地,固定所述第一相驱动信号的上升沿,并且基于所述第一相驱动信号的上升沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的下降沿。
8、可选地,所述第二相驱动信号移相方法包括:设置所述第二相驱动信号的上升沿,使得第二相驱动信号的上升沿时刻与所述第一相驱动信号的上升沿时刻之间的时间间隔为最小采样时间值,且所述第二相驱动信号的上升沿相对所述第一相驱动信号的上升沿滞后,并且固定所述第二相驱动信号的上升沿;基于所述第二相驱动信号的上升沿时刻以及所述第二相驱动信号的脉宽固定所述第二相驱动信号的下降沿。
9、可选地,所述第三相驱动信号的移相方法包括:比较所述第一相驱动信号和所述第二相驱动信号的下降沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中下降沿时刻相对滞后的一相pwm驱动信号作为第一基准驱动信号;基于所述第一基准驱动信号设置所述第三相驱动信号的下降沿,使得所述第三相驱动信号的下降沿时刻与所述第一基准驱动信号的下降沿时刻之间的时间间隔为最小采样时间值,且所述第三相驱动信号的下降沿相对所述第一基准驱动信号的下降沿滞后;比较所述第一相驱动信号和所述第二相驱动信号的上升沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中上升沿时刻相对滞后的一相驱动信号作为第二基准驱动信号;比较所述第三相驱动信号和第二基准驱动信号的上升沿时刻,所述第三相驱动信号的上升沿相对所述第二基准驱动信号的上升沿滞后时,直接固定所述第三相驱动信号的上升沿和下降沿;所述第三相驱动信号的上升沿相对所述第二基准驱动信号的上升沿超前时,再次对所述第三相驱动信号移相,使得所述第三相驱动信号的上升沿时刻与所述第二基准驱动信号的上升沿齐平,之后固定所述第三相驱动信号的上升沿和下降沿。
10、可选地,还包括对所述逆变器的直流母线电流进行采样以及重构。
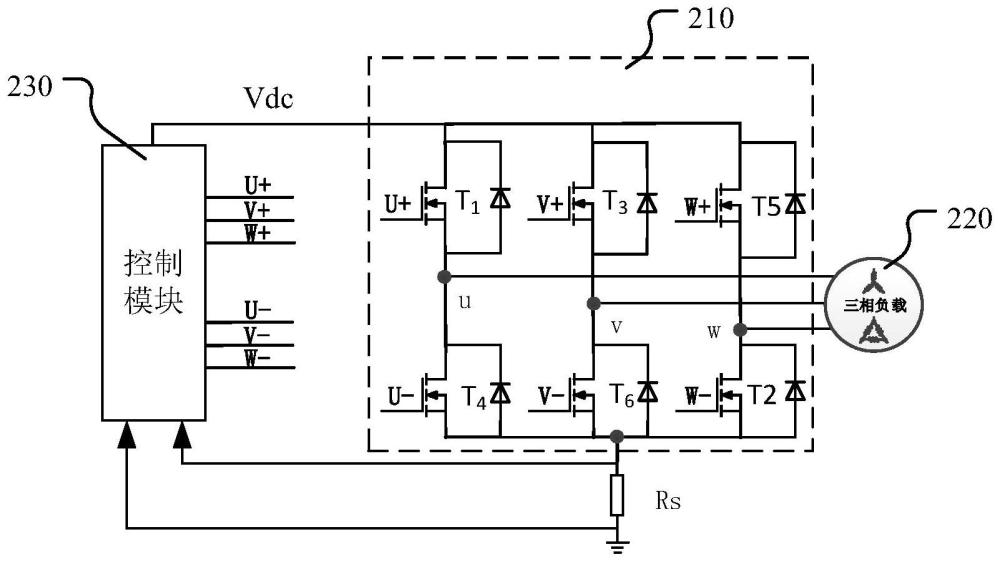
11、根据本发明的另一方面,提供一种逆变器控制系统,包括:控制模块,用于生成多相pwm驱动信号,设置最小采样时间值,基于所述最小采样时间值对pwm驱动信号移相,并且以移相之后的pwm驱动信号驱动逆变器;其中,所述移相模块移相过程中,多相pwm驱动信号的脉宽不变;移相之后,多相pwm驱动信号中相对超前的两相驱动信号的上升沿之间的时间间隔大于或等于最小采样时间值,多相pwm驱动信号中相对滞后的两相驱动信号的下降沿之间的时间间隔大于或等于最小采样时间值。
12、可选地,所述pwm驱动信号包括第一相驱动信号,第二相驱动信号以及第三相驱动信号,所述控制模块执行以下步骤以对pwm驱动信号移相:固定所述第一相驱动信号的上升沿和下降沿中的任一边沿,并且基于所述第一相驱动信号的固定边沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的另一边沿;以及基于所述第一相驱动信号的固定边沿,逐相移动所述第二相驱动信号和所述第三相驱动信号的上升沿以及下降沿。
13、可选地,固定所述第一相驱动信号的下降沿,并且基于所述第一相驱动信号的下降沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的上升沿。
14、可选地,所述控制模块执行以下步骤以对所述第二相驱动信号移相:设置所述第二相驱动信号的下降沿,使得所述第二相驱动信号的下降沿时刻与所述第一相驱动信号的下降沿时刻之间的时间间隔为最小采样时间值,且所述第二相驱动信号的下降沿相对所述第一相驱动信号的下降沿超前,并且固定所述第二相驱动信号的下降沿;基于所述第二相驱动信号的下降沿时刻以及所述第二相驱动信号的脉宽固定所述第二相驱动信号的上升沿。
15、可选地,所述控制模块执行以下步骤以对所述第三相驱动信号移相:比较所述第一相驱动信号和所述第二相驱动信号的上升沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中上升沿相对超前的一相驱动信号作为第一基准驱动信号;设置所述第三相驱动信号的上升沿,使得所述第三相驱动信号的上升沿时刻与所述第一基准驱动信号的上升沿时刻之间的时间间隔为最小采样时间值,且所述第三相驱动信号的上升沿相对所述第一基准驱动信号的上升沿超前;比较所述第一相驱动信号和所述第二相驱动信号的下降沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中下降沿相对超前的一相驱动信号为第二基准驱动信号;比较所述第三相驱动信号和第二基准驱动信号的下降沿时刻,所述第三相驱动信号的下降沿相对所述第二基准驱动信号的下降沿超前时,直接固定所述第三相驱动信号的上升沿和下降沿;所述第三相驱动信号的下降沿相对所述第二基准驱动信号的下降沿滞后时,再次对所述第三相驱动信号移相,使得所述第三相驱动信号的下降沿与所述第二基准驱动信号的下降沿齐平,之后固定所述第三相驱动信号的上升沿和下降沿。
16、可选地,固定所述第一相驱动信号的上升沿,并且基于所述第一相驱动信号的上升沿的时刻以及所述第一相驱动信号的脉宽,固定所述第一相驱动信号的下降沿。
17、可选地,所述控制模块执行以下步骤以对所述第二相驱动信号移相:设置所述第二相驱动信号的上升沿,使得第二相驱动信号的上升沿时刻与所述第一相驱动信号的上升沿时刻之间的时间间隔为最小采样时间值,且所述第二相驱动信号的上升沿相对所述第一相驱动信号的上升沿滞后,并且固定所述第二相驱动信号的上升沿;基于所述第二相驱动信号的上升沿时刻以及所述第二相驱动信号的脉宽固定所述第二相驱动信号的下降沿。
18、可选地,所述控制模块执行以下步骤以对所述第三相驱动信号移相:比较所述第一相驱动信号和所述第二相驱动信号的下降沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中下降沿时刻相对滞后的一相pwm驱动信号作为第一基准驱动信号;基于所述第一基准驱动信号设置所述第三相驱动信号的下降沿,使得所述第三相驱动信号的下降沿时刻与所述第一基准驱动信号的下降沿时刻之间的时间间隔为最小采样时间值,且所述第三相驱动信号的下降沿相对所述第一基准驱动信号的下降沿滞后;比较所述第一相驱动信号和所述第二相驱动信号的上升沿时刻,选择所述第一相驱动信号和所述第二相驱动信号中上升沿时刻相对滞后的一相驱动信号作为第二基准驱动信号;比较所述第三相驱动信号和第二基准驱动信号的上升沿时刻,所述第三相驱动信号的上升沿相对所述第二基准驱动信号的上升沿滞后时,直接固定所述第三相驱动信号的上升沿和下降沿;所述第三相驱动信号的上升沿相对所述第二基准驱动信号的上升沿超前时,再次对所述第三相驱动信号移相,使得所述第三相驱动信号的上升沿时刻与所述第二基准驱动信号的上升沿齐平,之后固定所述第三相驱动信号的上升沿和下降沿。
19、可选地,所述控制模块还对所述逆变器的直流母线电流进行采样并重构。
20、本技术实施例在移相的过程中,固定任意一相pwm驱动信号的任一边沿,三相pwm驱动信号的其它边沿均逐步并且缓慢地移动,保证了三相pwm驱动信号的边沿都是渐变变化的,避免了移相造成的边沿跳变。
21、经过移相之后的三相pwm驱动信号在每个扇区的任意一个pwm周期内,保证有两个有效矢量的作用时间大于最短采样时间,以使其能满足adc的转换精度的要求,从而保证采样准确。
22、进一步地,本技术的两个采样时刻不是连续的,其中的一个采样时刻在pwm驱动信号的下降沿之间,另一个采样时刻在pwm驱动信号的上升沿之间,本技术的两个采样时刻的时间间隔增长;本技术在下降沿和上升沿分别采样,两次采样不连续,不需要考虑adc的转换时间,因此本技术的最小采样窗口tmin的设置可以更小,本技术的移相方式可以适用于更高调制比的工况下,适用范围更广。
- 还没有人留言评论。精彩留言会获得点赞!