新能源汽车公路直线电机的制作方法
本发明涉及一种用于新能源汽车动态充电的直线电机技术,确切地说,是一种新能源汽车公路直线电机。
背景技术:
1、为了减少燃油汽车的尾气排放对大气环境的污染,新能源汽车成为世界各国发展的主要方向。新能源汽车主要包括各种纯电动汽车和混合动力汽车,纯电动汽车因为简单、廉价、实用,所以发展特别迅速,逐渐成为新能源汽车的主流,但是纯电动汽车仍然存在着续驶里程短,充电困难等缺陷。目前新能源汽车的充电问题主要是依靠大量的充电桩的方式来解决,充电桩的方式充电受到停车难的限制,还是存在着充电不方便、充电时间长和占用空间大等缺点。过去宣传有一种采用无线充电技术的新能源汽车,能够在公路上边行驶、边充电,它是在公路的内部铺设无线电发射线圈,新能源汽车的底盘设置无线电接收线圈,采用的是无线电磁共振动态充电技术。边行驶、边充电的确是一种理想的技术方案,但是无线电磁共振动态充电技术存在技术复杂、无线电能传输效率低、成本高,对人体有无线电辐射等问题,该技术目前处于实验阶段,没有突破性进展,是一种不成熟的技术方案。当下的充电桩受到停车难的限制,从技术上和数量上都满足不了强劲发展的各种纯电动汽车充电的需求,边行驶、边充电技术的新能源汽车至今未能实现,新能源汽车的充电问题未能得到更好的解决,因此,新能源汽车边行驶、边充电的动态充电技术仍然是新能源汽车的充电技术需要攻克的研究方向。
技术实现思路
1、为了克服现有新能源汽车的充电桩技术和无线电磁共振动态充电技术的缺陷,本发明公开一种经济实用的,既安全又简单的应用于新能源汽车动态充电的新能源汽车公路直线电机;本发明利用直线电机技术驱动新能源汽车,新能源汽车在虚轨车道上行驶时,不再使用车载电源,利用车外的电源动力行驶,利用车载无刷电机的反充电功能发电,间接的实现新能源汽车边行驶、边充电的目的。
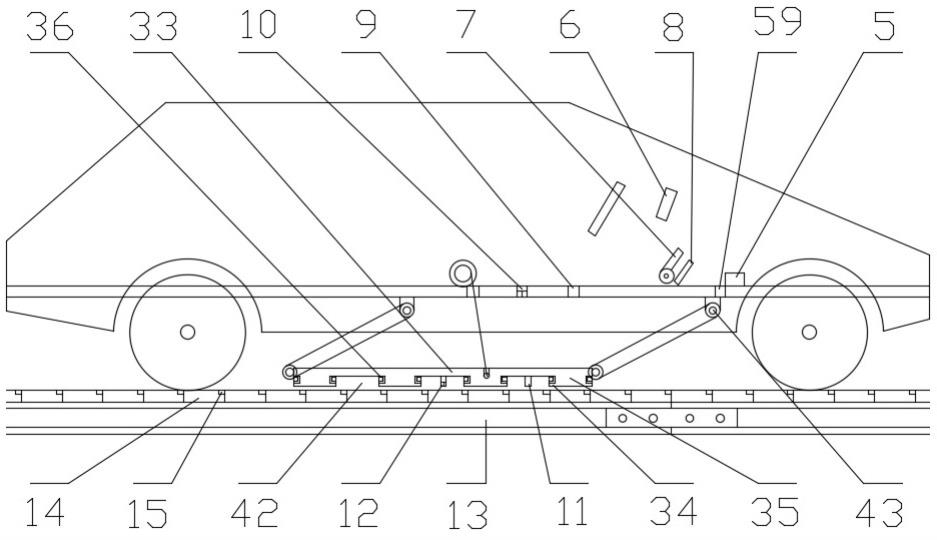
2、所述的新能源汽车公路直线电机包括应用新能源汽车和公路直线电机,所述应用新能源汽车主要是各种纯电动汽车,也包括各种混合动力汽车;所述的公路直线电机设有电动公路、虚轨车道、路面长定子、直线电机定子、智能升降器、直线电机动子、定子槽、工字型铁梁、独立控制两极短定子模块、霍尔开关传感器、独立控制两极短动子、动子线圈绕组、独立控制直线电机、空心线圈和智能控制器,其特征在于:所述的新能源汽车公路直线电机应用于新能源汽车的动态充电,所述的公路直线电机设有电动公路,电动公路设有多个型号相同的直线电机定子,多个直线电机定子的前、后端无缝对接成长线形的路面长定子,在柏油路车道中部设有定子槽,定子槽内安装路面长定子,路面长定子与定子槽之间的空间用白色塑胶填满,路面长定子与柏油路封装为一体,路面长定子平面与柏油路平面一致,路面长定子在道路中间形成一条有色长线条,有色长线条的车道为虚轨车道,虚轨车道上不影响任何机动车辆的行驶;所述应用新能源汽车的底盘下端增设一个智能升降器,智能升降器下端安装直线电机动子,直线电机动子包括多个独立控制两极短动子,直线电机动子的动子线圈绕组通电后产生多个两极固定电磁场;路面长定子和直线电机动子对应耦合组成多个独立控制直线电机,多个独立控制直线电机组成公路直线电机;应用新能源汽车的驾驶室内设有车载控制器、虚轨车道显示器、内电动调速踏板、内调速传感器、外电动调速踏板和外调速传感器;应用新能源汽车的底盘下端设有监控摄像机和上接近传感开关;直线电机动子下端设有外电动调速信号发射模块和下接近传感开关;所述的电动公路并排设有多个平行的虚轨车道,虚轨车道的中部设置路面长定子,路面长定子由多个型号相同的直线电机定子连接组成;直线电机定子由工字型铁梁、多个独立控制两极短定子模块、多个空心线圈和多个智能控制器组成,多个智能控制器内均设有霍尔开关传感器、电源开关电路、无线调速信号接收电路以及空心线圈调压电路;应用新能源汽车在普通公路上行驶时,右脚踏内电动调速踏板,应用新能源汽车自动工作在内电动行驶模式;应用新能源汽车在电动公路上行驶时,右脚踏外电动调速踏板,应用新能源汽车自动工作在外电动行驶模式;应用新能源汽车在电动公路上沿着虚轨车道中部的轨迹行驶,虚拟轨道是应用新能源汽车的导向轨道,驾驶员通过监控摄像机,在虚轨车道显示器上监控直线电机动子在虚轨车道上面的运动位置,驾驶员操作方向盘使运动的直线电机动子位于有色长线条的中间位置,使直线电机动子与路面长定子对应;外电动调速踏板的外调速传感器输出的调速信号包括调压信号、高电平触发信号和低电平触发信号,调压信号控制公路直线电机的线速度,高、低电平触发信号控制智能升降器和直线电机动子的升降,运动中的直线电机动子下降后,直线电机动子的下端平面与路面长定子的上端平面之间自动形成微小的稳定的均匀气隙,应用新能源汽车在智能控制的外电动行驶中,直线电机动子与路面长定子之间具有上、下对应的动态耦合的近距离的非接触的磁悬浮驱动功能;多个独立控制两极短定子模块与多个独立控制两极短动子对应耦合成多个独立控制直线电机,多个独立控制直线电机组成公路直线电机,相当于多个应用新能源汽车与虚轨车道组成了多个公路直线电机;应用新能源汽车在虚轨车道上向前行驶,相当于直线电机动子在路面长定子上面向前行驶,在智能控制器的控制下,不再使用车载电源,车外的直流电源分别在不同的时间给多个独立控制两极短定子模块供电和断电;多个独立控制两极短动子的固定磁场前端分别在不同的时间接近多个智能控制器的霍尔开关传感器,触发多个霍尔开关传感器导通,多个独立控制两极短动子的固定磁场后端分别在不同的时间离开多个智能控制器的霍尔开关传感器,触发多个霍尔开关传感器关闭;多个霍尔开关传感器分别在前、后不同的时间打开和关闭直线电机动子覆盖范围内的多个独立控制两极短定子模块,多个独立控制两极短定子模块产生跟随直线电机动子移动的多个两极脉冲电磁场,多个两极脉冲电磁场与直线电机动子的多个两极固定电磁场之间均产生多个同性相斥的矢量电磁推力,多个矢量电磁推力向前推动直线电机动子,相当于多个独立控制直线电机驱动应用新能源汽车向前行驶;外电动行驶中,利用应用新能源汽车的车载无刷电机的反充电功能给车载蓄电池组充电,间接的实现应用新能源汽车边行驶、边充电的目的。
3、所述新能源汽车公路直线电机的第1步方案是:所述电动公路包括多段虚轨车道和多个红绿灯路口,所述的路面长定子上面形成的有色长线条图形是虚轨车道,电动公路转弯的红绿灯路口不设置虚轨车道,多段虚轨车道设置在多个红绿灯路口之间的整段电动公路上,多个整段电动公路允许有一定的弯曲度,是长短不一的类似直线型的电动公路,电动公路与高速公路或者普通公路兼容,在高速公路或者普通公路的基础上可以加装虚轨车道,电动公路如同高速公路和普通公路一样设有同一方向并列行驶的多个车道,电动公路设有同一方向并列行驶的直行虚轨车道、左转弯变道虚轨车道和右转弯变道虚轨车道,各种车辆可以在3个虚轨车道上任意变道和转弯,3个虚轨车道均为柏油路平面,3个虚轨车道均具有外电动功能;在较窄的普通公路上可以加装双向的左虚轨车道和右虚轨车道;多个直线电机定子的前、后端无缝对接组成路面长定子,多个路面长定子组成多段虚轨车道,多段虚轨车道的前、后端之间的红禄灯路口均有不同的间隔距离,多段虚轨车道组成长距离的电动公路;所述定子槽的加工方法是:在虚轨车道中部的柏油路面上,用切割机切割成两条平行的切割线,两条切割线的深度均等于直线电机定子的高度,将两条切割线之间的柏油材料挖去后形成直线型的定子槽,定子槽的长度等于虚轨车道的长度,定子槽的宽度大于路面长定子的宽度,定子槽的深度等于路面长定子的高度。
4、所述新能源汽车公路直线电机的第2步方案是:所述虚轨车道的中部设置定子槽,定子槽内设有多个前、后端对接的直线电机定子,直线电机定子由工字型铁梁和多个独立控制两极短定子模块组成,为了方便直线电机定子的大规模生产和安装,工字型铁梁的长度设为10米,等于直线电机定子的长度,工字型铁梁的上端设有长条导磁板,工字型铁梁的下端设有长条底座板,长条导磁板与长条底座板之间的中部设有长条垂直板,长条导磁板、长条底座板和长条垂直板一体化铸造成型,长条导磁板的上端安装多个型号相同的独立控制两极短定子模块,所述独立控制两极短定子模块设有卡装式塑料外壳、空心线圈和智能控制器,所述智能控制器内部设有霍尔开关传感器、电源开关电路、无线调速信号接收电路和空心线圈调压电路;多个独立控制两极短定子模块卡装在长条导磁板上,整齐排列组成独立控制两极短定子模组,独立控制两极短定子模组的长度与工字型铁梁的长度一致;为了方便直线电机定子的大规模生产和安装,大量的独立控制两极短定子模块实行模块化的大规模生产;卡装式塑料外壳设有左空心线圈腔和右空心线圈腔,左空心线圈腔左边设有左控制器腔,右空心线圈腔右边设有右控制器腔;左空心线圈腔与右空心线圈腔相同,左控制器腔与右控制器腔相同,左空心线圈腔和左控制器腔与右空心线圈腔和右控制器腔对称于卡装式塑料外壳的中线,左空心线圈腔和右空心线圈腔内分别设有左空心线圈和右空心线圈,左、右空心线圈是一种用自粘漆包线绕制的扁平的脱胎式圆线圈,左、右空心线圈的绕制方向和匝数均相同,左空心线圈的首端与右空心线圈的首端连接,串联连接的左空心线圈和右空心线圈接通直流电源后,独立控制两极短定子模块的左边产生n极垂直方向的左定子电磁场;独立控制两极短定子模块的右边产生s极垂直方向的右定子电磁场;左控制器腔内设有电源开关电路,左控制器腔内左前端设有霍尔开关传感器,右控制器腔内设有无线调速信号接收电路和空心线圈调压电路;霍尔开关传感器的上端平面与卡装式塑料外壳的上端平面一致,霍尔开关传感器的下端设有永磁体颗粒,永磁体颗粒的上端是n极、下端是s极,霍尔开关传感器与永磁体颗粒之间用ab胶粘接,永磁体颗粒的磁场方向是垂直的;所述霍尔开关传感器的特性是:霍尔开关传感器的上端接近垂直方向的n极强磁场时,触发霍尔开关传感器保持在导通状态,霍尔开关传感器上端垂直方向的n极强磁场离开时,霍尔开关传感器下端永磁体颗粒垂直方向的n极磁场触发霍尔开关传感器保持在截止状态;左控制器腔左下端设有电源正极接线桩,右控制器腔右前下端设有电源负极接线桩;电源开关电路的电源端连接电源正极接线桩的上端,电源开关电路的输入端连接霍尔开关传感器的输出端,电源开关电路和无线调速信号接收电路以及空心线圈调压电路的接地端均连接电源负极接线桩的上端,电源开关电路的输出端连接无线调速信号接收电路的电源端和空心线圈调压电路的电源端,空心线圈调压电路的输出端连接右空心线圈的尾端,左空心线圈的尾端连接电源负极接线桩的上端,无线调速信号接收电路的输出端连接空心线圈调压电路的输入端;卡装式塑料外壳的下端设有左卡板和右卡板,左、右卡板下端均设有卡钩,左卡板和右卡板分别卡紧在工字型铁梁上端长条导磁板的左、右端;多个独立控制两极短定子模块均卡装在工字型铁梁上端,以次紧贴、整齐排列,组成独立控制两极短定子模组,独立控制两极短定子模组与工字型铁梁组装成直线电机定子,多个直线电机定子前、后对接后,组装成路面长定子;多个工字型铁梁的垂直板的前、后端均设有前连接孔和后连接孔,垂直板的左边设有左连接板,垂直板的右边设有右连接板,左、右连接板均设有4个连接孔,多个工字型铁梁前、后端对接处垂直板的4个连接孔,与左连接板的4个连接孔和右连接板的4个连接孔均对应,所述的4个连接孔内均设有对接螺丝钉,多个对接螺丝钉和多个左、右连接板将多个直线电机定子夹紧连接,组成路面长定子;路面长定子的左端设有正极电源线,路面长定子的右端设有负极电源线,正、负极电源线均是裸体铜线,正极电源线焊接在多个电源正极接线桩的左下端;负极电源线焊接在多个电源负极接线桩的右下端。
5、所述新能源汽车公路直线电机第3步方案是:在电动公路旁边设有多个高压电线杆,多个高压电线杆上端均设有绝缘子,多个绝缘子上端支撑高压输电线,多个高压电线杆上设有多个型号相同的变电器,多个变电器均与多段虚轨车道对应,多个变电器的输入端均连接高压输电线,变电器将高压输电线上的高压交流电变成中压直流电源,多个变电器的输出火线和输出地线经过地下电缆分别连接与虚轨车道对应的路面长定子的电源正极接线桩和电源负极接线桩。
6、所述新能源汽车公路直线电机第4步方案是:所述应用新能源汽车底盘下端设有智能升降器,智能升降器设有平行四边形的活动架,活动架的底边设有直线电机动子,直线电机动子设有多个独立控制两极短动子,多个独立控制两极短动子设有动子铁芯,动子铁芯是一种铸铁构件,动子铁芯设有长方形的直线铁芯和多个⊥型铁芯,多个⊥型铁芯的规格均相同,直线铁芯的左下端设有多个等分的左⊥型铁芯,直线铁芯的右下端设有多个等分的右⊥型铁芯,多个左⊥型铁芯和多个右⊥型铁芯左、右对应,对称于直线铁芯的中线,⊥型铁芯下端设有方铁导磁板,方铁导磁板的上端中部设有圆柱铁芯,圆柱铁芯的上端连接直线铁芯,直线铁芯和多个圆柱铁芯以及多个方铁导磁板一体化铸造成型,所述的动子铁芯为防锈的镀锌件;多个左圆柱铁芯的外圆和多个右圆柱铁芯的外圆均设有绝缘的线圈骨架,多个线圈骨架内均绕制相同匝数的动子线圈,多个左动子线圈的绕制方向均一致;多个右动子线圈的绕制方向均一致,多个左动子线圈的绕制方向与多个右动子线圈的绕制方向互为相反,多个串联连接的左动子线圈与多个串联连接的右动子线圈串联连接成为总体的动子线圈绕组,多个动子线圈与多个⊥型铁芯组成多个电磁线圈,左、右对应的电磁线圈组成独立控制两极短动子,多个独立控制两极短动子组成直线电机动子;当动子线圈绕组接通直流电压时,多个左、右对应的电磁线圈产生多个两极电磁场,直线电机动子的多个左方铁导磁板的磁通面产生多个n极垂直方向的电磁场;多个右方铁导磁板的磁通面产生多个s极垂直方向的电磁场;左方铁导磁板与右方铁导磁板之间设有间隔,左方铁导磁板与右方铁导磁板均为正方形,正方形的边长略大于左、右空心线圈的直径,多个左方铁导磁板之间的等分间隔与多个右方铁导磁板之间的等分间隔均等于正方形的边长;当直线电机动子前端的独立控制两极短动子与路面长定子的某个独立控制两极短定子模块对应时,直线电机动子后面的多个独立控制两极短动子与多个独立控制两极短定子模块之间,在长度方向上均为不同错位的对应关系,在宽度方向上多个左、右空心线圈均与多个左、右方铁导磁板对应;一个独立控制两极短动子和一个独立控制两极短定子模块对应耦合成一个独立控制直线电机,直线电机动子的多个独立控制两极短动子与路面长定子的多个独立控制两极短定子模块对应耦合成多个独立控制直线电机,多个独立控制直线电机组成公路直线电机,公路直线电机的功率等于多个独立控制直线电机功率的总和。
7、所述新能源汽车公路直线电机第5步方案是:所述智能升降器的上端设有4个吊耳,4个吊耳均设有轴孔,所述应用新能源汽车的底盘前下端焊接前左吊耳和前右吊耳,前左、右吊耳的轴孔内设有长吊耳轴;车底盘的后下端设有后左吊耳和后右吊耳,后左吊耳的轴孔内设有左短吊耳轴,后右吊耳的轴孔内设有右短吊耳轴;智能升降器设有4个斜边臂,4个斜边臂的长度均相等,4个斜边臂均设有前轴孔和后轴孔,前左斜边臂和前右斜边臂的前轴孔分别松配合安装在前吊耳轴的左端和右端,后左斜边臂和后右斜边臂的前轴孔分别松配合安装在左短吊耳轴的左端和右短吊耳轴的右端;长吊耳轴的左、右端和左短吊耳轴的左端以及右短吊耳轴的右端均设有上轴挡,4个上轴挡将4个斜边臂定位于4个吊耳的外端;所述直线铁芯的前端焊接前动子轴,直线铁芯的后端焊接后动子轴,前左斜边臂和前右斜边臂的后轴孔分别松配合安装在前动子轴的左、右端,后左斜边臂和后右斜边臂的后轴孔分别松配合安装在后动子轴的左、右端;前动子轴的左、右端和后动子轴的左、右端均设有下轴挡,4个下轴挡将直线电磁动子定位于4个斜边臂的内端;所述前吊耳轴上安装前左压力弹簧和前右压力弹簧,2个压力弹簧的弹力均相等,2个压力弹簧的作用在于使直线电机动子具有一定的向下的弹性压力;4个斜边臂与车底盘和直线电机动子分别形成对称的左平行4边形活动架和右平行4边形活动架;直线电机动子在上升或者下降的过程中,左、右平行4边形活动架同样变形,直线电机动子的前、后端和左、右端始终保持水平状态,直线电机动子始终定位在应用新能源汽车的车底盘中线;所述的智能升降器设有升降电机,升降电机固定在应用新能源汽车底盘上端中部,升降电机右端的驱动轴设有卷绳轮,卷绳轮圆周设有卷绳槽,卷绳槽内设有钢丝绳;直线电机动子的中部设有钢丝绳孔,钢丝绳孔下端设有销钉,钢丝绳的下端固定在销钉上,钢丝绳的上端固定在卷绳槽底部,当升降电机逆时针转动时,卷绳轮将钢丝绳卷起,直线电磁动子上升,当升降电机顺时针转动时,卷绳轮将钢丝绳放开,直线电机动子下降;升降电机后端的车底盘中部设有上接近传感开关,直线电机动子的多个独立控制两极短动子之间设有多个间隔,直线电机动子中部的间隔内设有下接近传感开关;上接近传感开关和下接近传感开关的型号相同,所述上、下接近传感开关是一种反射式红外传感开关,上、下接近传感开关均设有一体化的发射光头和接收光头;上、下接近传感开关的输出线连接分别连接升降电机控制模块的上输入端和下输入端;当直线电机动子上升到接近车底盘时,上接近传感开关的接收光头才能接收到发射光头的信号,接收光头触发升降电机控制模块关断升降电机电源,使直线电机动子的上端接近并保持在车底盘的下端;当直线电机动子下降到接近地面时,下接近传感开关的接收光头才能接收到发射光头的信号,接收光头触发升降电机控制模块关断升降电机电源,使直线电机动子的下端接近地面2mm左右;直线电机动子前部的间隔内设有外电动调速信号发射模块,外电动调速信号发射模块的输入端连接外调速传感器的输出端;应用新能源汽车底盘设有线孔,动子线圈绕组的输出线,上、下接近传感开关的输出线以及监控摄像机输出线经过线孔与车载控制器连接。
8、所述新能源汽车公路直线电机第6步方案是:所述的智能升降器设有升降电机,升降电机固定在应用新能源汽车底盘上端中部,升降电机右端的驱动轴设有卷绳轮,卷绳轮圆周设有卷绳槽,卷绳槽内设有钢丝绳;直线电机动子的中部设有钢丝绳孔,钢丝绳孔下端设有销钉,钢丝绳的下端固定在销钉上,钢丝绳的上端固定在卷绳槽底部,当升降电机逆时针转动时,卷绳轮将钢丝绳卷起,直线电磁动子上升,当升降电机顺时针转动时,卷绳轮将钢丝绳放开,直线电机动子下降;升降电机后端的车底盘中部设有上接近传感开关,直线电机动子的多个独立控制两极短动子之间设有多个间隔,直线电机动子中部的间隔内设有下接近传感开关;上接近传感开关和下接近传感开关的型号相同,所述上、下接近传感开关是一种反射式红外传感开关,上、下接近传感开关均设有一体化的发射光头和接收光头;上、下接近传感开关的输出线连接分别连接升降电机控制模块的上输入端和下输入端;当直线电机动子上升到接近车底盘时,上接近传感开关的接收光头才能接收到发射光头的信号,接收光头触发升降电机控制模块关断升降电机电源,使直线电机动子的上端接近并保持在车底盘的下端;当直线电机动子下降到接近地面时,下接近传感开关的接收光头才能接收到发射光头的信号,接收光头触发升降电机控制模块关断升降电机电源,使直线电机动子的下端接近地面2mm左右;直线电机动子前部的间隔内设有外电动调速信号发射模块,外电动调速信号发射模块的输入端连接外调速传感器的输出端;应用新能源汽车底盘设有线孔,动子线圈绕组的输出线,上、下接近传感开关的输出线以及监控摄像机输出线经过线孔与车载控制器连接。
9、.所述新能源汽车公路直线电机第7步方案是:所述应用新能源汽车的驾驶室内设有方向盘、内电动调速踏板、内调速传感器、外电动调速踏板、外调速传感器、车载控制器和虚轨车道显示器;所述车载控制器内部设有内电动无刷电机控制模块、升降电机控制模块和直线电机动子电源开关电路;所述内电动调速踏板位于驾驶员右脚的位置,所述外电动调速踏板位于内电动调速踏板的右侧,内电动调速踏板的下端设有内调速传感器,外电动调速踏板的下端设有外调速传感器,内调速传感器的输出端连接内电动无刷电机控制模块的输入端;外调速传感器的输出端连接外电动调速信号发射模块的输入端和升降电机控制模块的输入端以及直线电机动子电源开关电路的输入端;应用新能源汽车的底盘下端中部设有监控摄像机,监控摄像机摄取直线电机动子与虚轨车道动态对应的图像,监控摄像机输出线连接虚轨车道显示器的输入端;当脚踏内电动调速踏板或者外电动调速踏板时,内、外调速传感器输出的电平分别从低电平到高电平之间的范围内变化,内、外踏板从大到小的角度变化与内、外调速传感器的输出信号从低到高的电平变化一致;外电动调速信号发射模块的发射功率小,辐射范围小,外电动调速信号发射模块与无线调速信号接收电路接近时接收信号最强,外调速传感器输出的调压信号经过外电动调速信号发射模块很容易无线发射到智能控制器的无线调速信号接收电路;应用新能源汽车范围以外的多个智能控制器的无线调速信号接收电路均接收不到本车的外调速传感器的输出信号;当应用新能源汽车在普通柏油路面上行驶时,使用内调速踏板,使应用新能源汽车进入内电动行驶模式,内调速传感器的调速电压控制车载无刷电机的转速和车速;当应用新能源汽车进入虚轨车道行驶时,使用外调速踏板,使应用新能源汽车进入外电动行驶模式,外调速传感器的调速信号通过无线传输方式控制公路直线电机的线速和车速;驾驶员监视显示器的虚轨车道图像,人工掌握方向盘,控制直线电机动子行驶在虚轨车道的中线,使直线电机动子对应于两条白色线条的中间,与路面长定子准确对应;外调速踏板放松时,外调速传感器输出电压为0,是低电平触发信号,脚踏外调速踏板时,外调速传感器输出0以上电压,是高电平触发信号;外调速传感器的高电平触发信号打开直线电机动子电源开关电路,给动子线圈绕组供电,所述高电平触发信号同时打开车载控制器的升降电机控制模块,控制直线电机动子下降,下降到直线电机动子的下端平面与路面长定子的上端平面之间的均匀气隙为2mm左右时自动停止;外调速传感器的调速信号经过外电动调速信号发射模块无线发射到智能控制器的无线调速信号接收电路,无线调速信号接收电路输出调压信号到空心线圈调压电路的输入端,空心线圈调压电路输出可调的驱动电压控制公路直线电机的线速度;当调速踏板松开后,外电动行驶模式的调速传感器的输出低电平触发信号,低电平触发信号关闭直线电机动子电源开关电路,给动子线圈绕组断电,同时触发车载控制器的升降电机控制模块,控制直线电机动子上升;应用新能源汽车内电动行驶模式与外电动行驶模式的转换非常简单、迅速,通过驾驶员脚踩内调速踏板或者脚踩外调速踏板即可转换,内、外调速踏板相隔很近,驾驶员的右脚很方便的脚踩内调速踏板或者脚踩外调速踏板,随时随地迅速的进行内、外电动行驶模式的转换,当应用新能源汽车在虚轨车道上行驶需要变道转弯时,驾驶员的右脚踩内调速踏板,内调速传感器控制车载无刷电机驱动应用新能源汽车,应用新能源汽车工作在内电动行驶模式;当应用新能源汽车经过红禄灯路口又回到虚轨车道上行驶时,驾驶员的右脚踩外调速踏板,应用新能源汽车又工作在外电动行驶模式;外电动行驶时,外调速传感器输出高电平触发信号,控制应用新能源汽车的直线电机动子下降和直线电机动子的电源打开;当右脚将外调速踏板放松时,外调速传感器输出的低电平触发信号,公路直线电机停止工作,低电平触发信号触发车载控制器直线电机动子的电源开关电路关闭,直线电机动子断电,多极电磁场消失,避免了直线电机动子的暴露在外的多极电磁场长期通电造成的磁吸污染,低电平触发信号同时触发车载控制器的升降电机控制模块,控制直线电机动子上升收回,避免直线电机动子与虚轨车道接触摩擦;当外调速踏板加速时,外调速踏板的调速传感器信号无线发射到调速信号接收电路到空心线圈调压电路的输入端,空心线圈调压电路输出可变电压驱动公路直线电机,实时控制应用新能源汽车的外电动行驶速度;多个虚轨车道上有多个应用新能源汽车,都是分别控制多个独立控制直线电机,外调速踏板的外调速传感器信号无线发射的功率小,与外电动调速信号发射模块接近的调速信号接收电路接收信号的范围小,多个应用新能源汽车之间的调速控制互不干涉,互相不受影响;应用新能源汽车原有的内电动行驶功能不变,原有的制动功能不变,原有的车载无刷电机反充电功能不变。
10、所述新能源汽车公路直线电机第8步方案是:当脚踏外调速踏板时,外调速传感器输出高电平信号触发车载控制器的升降电机控制模块,控制直线电机动子下降,同时打开直线电机动子的电源开关电路,输出直流电源到动子线圈绕组,直线电机动子的多个独立控制两极短动子产生多个两极垂直电磁场,直线电机动子的左端产生多个垂直方向的n极电磁场,直线电机动子的右端产生多个垂直方向的s极电磁场;当直线电机动子下降接近路面长定子时,直线电机动子与路面长定子对应,独立控制两极短动子的电磁场接近独立控制两极短定子模块前端的霍尔开关传感器,独立控制两极短定子模块通电,独立控制两极短动子的电磁场离开独立控制两极短定子模块前端的霍尔开关传感器,独立控制两极短定子模块断电,独立控制两极短定子模块通电时左端产生垂直方向的n极电磁场,右端产生垂直方向的s极电磁场,与独立控制两极短动子产生的两极垂直电磁场上下对应,二者上下之间同性相斥;当直线电机动子前端第1个独立控制两极短动子前端的电磁场接近某独立控制两极短定子模块前端的霍尔开关传感器,某独立控制两极短定子模块与第1个独立控制两极短动子之间的相斥力使第1个独立控制两极短动子存在向上和向前的矢量推力,某独立控制两极短定子模块后边第1个独立控制两极短定子模块前端的霍尔开关传感器离开独立控制两极短动子,第1个独立控制两极短定子模块断电;因为独立控制两极短动子的长度略大于独立控制两极短定子模块的长度,所以多个独立控制两极短动子与路面长定子的多个独立控制两极短定子模块之间均为不同错位的对应关系;此时,某独立控制两极短定子模块后边第2个和第3个独立控制两极短定子模块前端的霍尔开关传感器均接近直线电机动子前端第2个独立控制两极短动子的电磁场,后边第2个和第3个独立控制两极短定子模块与前端第2个的独立控制两极短动子之间存在向上和向前的矢量推力,直线电机动子后端的多个独立控制两极短动子与对应的多个独立控制两极短定子模块之间均存在不同力度的向上和向前的矢量推力,因此,直线电机动子向前运动在任何位置,直线电机动子的多个独立控制两极短动子与直线电机动子覆盖范围内的多个独立控制两极短定子模块之间始终不间断的存在向上和向前的矢量推力;直线电机动子向前运动中,多个霍尔开关传感器分别在前、后不同的时间打开和关闭直线电机动子覆盖范围内的多个独立控制两极短定子模块,多个独立控制两极短定子模块产生跟随直线电机动子移动的多个两极脉冲电磁场,多个两极脉冲电磁场与直线电机动子的多个两极固定电磁场之间均存在多个同性相斥的矢量电磁推力,多个同性相斥的矢量电磁推力向前推动直线电机动子;直线电机动子的多个两极垂直电磁场与工字型铁梁的长条导磁板之间相隔一层多个左、右空心线圈,多个左、右空心线圈断电时为非导磁体,因此,直线电机动子与路面长定子之间相吸的磁力小,使直线电机动子在路面长定子上面运动时的磁阻小;直线电机动子在4个压力弹簧的弹性压力作用下产生向下的弹性压力,路面长定子产生向上的电磁推斥力与相下的弹簧压力达到一种自动平衡状态,直线电机动子与路面长定子之间的均匀气隙相当于2mm左右的磁垫;因为直线电机动子与路面长定子之间的电磁推斥力与磁场强度成正比,与两者之间的垂直距离成反比,直线电机动子与路面长定子之间的垂直距离越近,两者之间的电磁推斥力越大,所以直线电机动子与路面长定子之间不会产生接触摩擦现象,直线电机动子与路面长定子之间的均匀气隙处于波动的磁悬浮状态,在直线电机动子的4个压力弹簧的弹性压力作用下,消除了新能源汽车颠簸时的车载重量对均匀气隙的影响,稳定了直线电磁动子与路面长定子之间微小的均匀气隙;多个独立控制直线电机的工作过程中,均产生不同角度的向上和向前的矢量电磁推斥力,独立控制两极短定子模块通电的初期,左、右方铁导磁板与左、右空心线圈的对应面积最大,矢量电磁推斥力最大;独立控制两极短定子模块通电的末期,左、右方铁导磁板与左、右空心线圈的对应面积最小,矢量电磁推斥力最小;独立控制直线电机工作周期的矢量电磁推斥力是不均匀的,多个独立控制直线电机分别工作在不同的开关时间,多个独立控制直线电机的矢量电磁推斥力的合力是均匀的;直线电机动子的4个斜边臂推动应用新能源汽车前进的同时,4个斜边臂有一定向下的矢量压力,向下的矢量压力与公路直线电机的驱动功率成正比,与公路直线电机的动子和定子之间的电磁推斥力成正比,与直线电机动子与路面长定子之间的均匀气隙成反比,应用新能源汽车向前加速的力度越大,直线电机动子向下施压的力度越大,直线电机动子与路面长定子之间的均匀气隙就越小,直线电机动子与路面长定子之间的电磁推斥力越大,使前直线电机动子与路面长定子之间的均匀气隙稳定、可靠,保持了二力平衡;公路直线电机向下的矢量压力减轻了应用新能源汽车的载重,减少了轮胎与地面的摩擦,节省了公路直线电机的驱动电功率;右脚踏外调速踏板时,外调速踏板的加速信号经过无线发射和接收,到空心线圈调压电路的调压端,空心线圈调压电路输出电压可调的直流电到左、右空心线圈,控制公路直线电机的加速功率,随意控制应用新能源汽车向前运动的速度;运动中的多个独立控制直线电机均工作在高效短暂的一过性供电状态,直线电机动子覆盖范围以内的多个独立控制直线电机通电时,直线电机动子覆盖范围以外的路面长定子均为断电状态,使虚轨车道的动态供电既安全又省电;运动中的纯电动汽车和混合动力汽车的车载控制器将车载无刷电机转变成发电机给车载蓄电池组充电,实现一边外电动行驶,一边给车载蓄电池组充电的目的。
11、所述新能源汽车公路直线电机的有益效果在于:应用于新能源汽车动态充电的新能源汽车公路直线电机与无线电磁共振动态充电技术相比结构简单、成本低,不存在无线电辐射问题;与充电桩技术相比省事、省时、省空间、省资源;尤其是新能源汽车公路直线电机动态充电的优越性更为突出,一边外电动行驶,一边给车载蓄电池组充电,电动公路代替了充电桩,大大提高了应用新能源汽车的续驶里程和行驶速度;路面长定子和直线电机动子是新能源汽车公路直线电机的最大的工程成本和生产成本;路面长定子和直线电机动子的原材料均为普通廉价的铜、铁材料和塑料材料以及普通的电子元器件,大量的路面长定子和直线电机动子所需要的原材料成本低,路面长定子和直线电机动子的制造工艺简单,容易大规模生产,降低了大量路面长定子和直线电机动子的生产成本,路面长定子与柏油路紧密结合、融为一体不容易损坏,暴露在路面的多个独立控制两极短定子模块的外壳是高强度、耐腐蚀、耐高温的塑料制品,不怕风雨日晒,寿命长,所述工字型铁梁的抗弯强度大,提高了工字型铁梁上端的路面长定子平面的平整度,稳定了直线电机动子与路面长定子之间的磁悬浮气隙,自动稳定的磁悬浮气隙避免了直线电机动子与路面长定子接触摩擦,提高了直线电机动子与路面长定子之间的磁悬浮驱动的可靠性;应用新能源汽车底盘附加的智能升降器和直线电机动子体积小、重量轻、成本低,直线电机动子利用车底盘下端的空间,安装方便;新能源汽车在内动力行驶模式行驶时,直线电机动子上升隐藏在车底盘下端,不影响车底盘下端与地面之间常规的空间;电动公路的路面长定子平面与柏油路平面一致,与普通公路的性能相同,不影响任何机动车辆的通行,所述应用新能源汽车可以与其他燃油车辆相同的速度行驶;电动公路有效的节约了公路资源,延长了应用新能源汽车的续驶里程,节约了应用新能源汽车车载蓄电池组的用电,省去了充电桩充电的麻烦和充电时间,解决了停车充电的困难;一边外电动行驶,一边给车载蓄电池组充电的新能源汽车公路直线电机能有效的减少大量的充电桩的使用,能够推动纯电动汽车产业的迅猛发展,边行驶、边充电的新能源汽车公路直线电机充电效率高,相当于行驶中的充电桩在公路上不断的给车载蓄电池组充电,而充电桩充电必须停车在专属区才能充电,充电效率低,因此新能源汽车公路直线电机的工业实用性远大于充电桩的工业实用性。新能源汽车公路直线电机能够带动产业结构的转型,提高社会经济效益,新能源汽车公路直线电机产品的推广应用作为新兴产业的兴起成为可能;新能源汽车公路直线电机设置的虚拟轨道很容易实现无人驾驶的新能源汽车。
- 还没有人留言评论。精彩留言会获得点赞!