一种分布式光伏主动支撑的方法与流程
本发明涉及光伏控制,尤其涉及一种分布式光伏主动支撑的方法。
背景技术:
1、随着风电、光伏等新能源在电网中渗透率的提高,电网正向着以新能源为主体的新型电力系统迈进。由于高比例新能源和电力电子设备逐渐替代传统同步发电机组,而电力电子设备缺乏惯量和阻尼,惯量决定了系统功率和频率波动幅值的大小,阻尼比则决定了系统震荡和受扰的恢复时间,因此,惯量与阻尼系数的取值合理性直接决定了系统响应性能。
2、然而现有技术中对惯量和阻尼进行调整时,采用人为手动调整的方式,导致操作繁琐以及控制结果不稳定,进而影响系统响应性能,降低系统频率的稳定性。
技术实现思路
1、本发明实施例提供了一种分布式光伏主动支撑的方法,以解决现有技术中对系统中惯量和阻尼进行调节时导致的操作繁琐以及控制结果不稳定,进而影响系统响应性能,降低系统频率的稳定性的问题。
2、第一方面,本发明实施例提供了一种分布式光伏主动支撑的方法,包括:
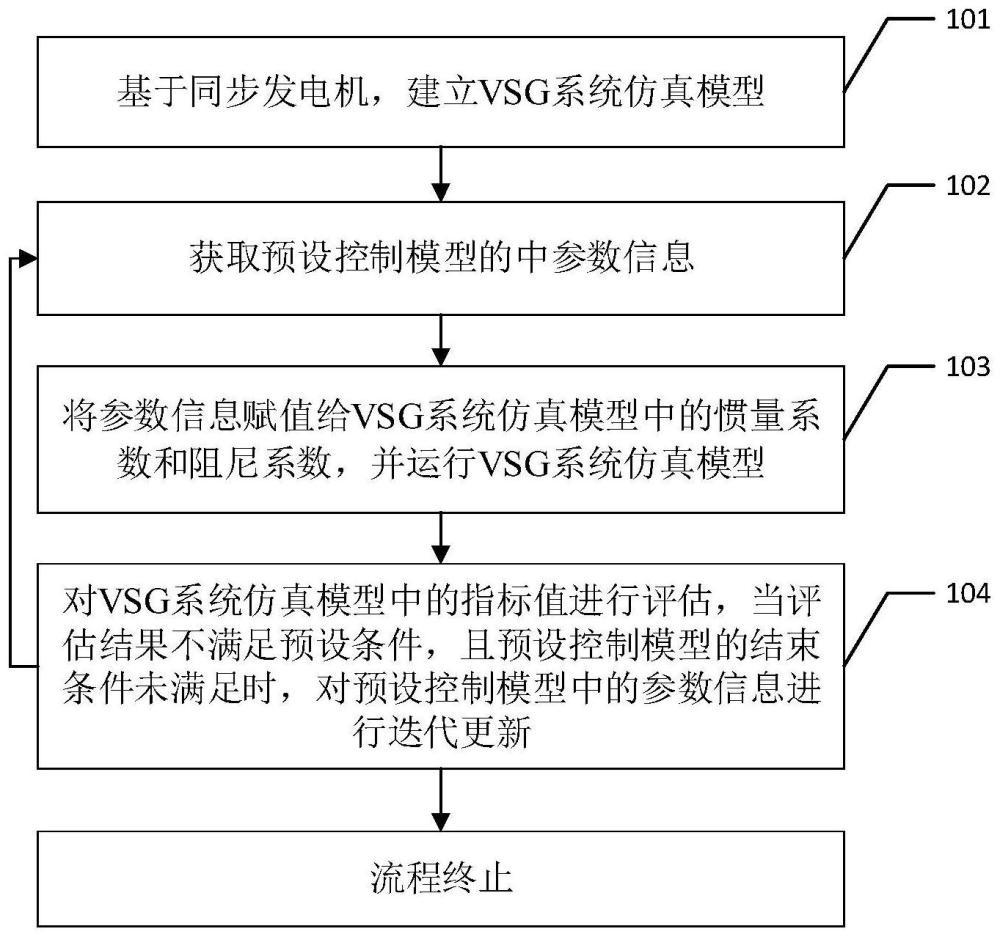
3、基于同步发电机,建立vsg系统仿真模型;
4、获取预设控制模型中的参数信息;
5、将所述参数信息赋值给所述vsg系统仿真模型中的惯量系数和阻尼系数,并运行所述vsg系统仿真模型;
6、对所述vsg系统仿真模型中的指标值进行评估,当评估结果不满足预设条件,且所述预设控制模型的结束条件未满足时,对所述预设控制模型中的参数信息进行迭代更新,并跳转到“获取预设控制模型的中参数信息”步骤继续执行,否则流程终止。
7、在一种可能的实现方式中,所述基于同步发电机,建立vsg系统仿真模型,包括:
8、基于同步发电机的转子运动特性和励磁特性,建立vsg系统仿真模型。
9、在一种可能的实现方式中,转子运行特性方程为
10、
11、励磁特性方程为
12、
13、其中,ω表示同步发电机的输出角速度,h表示惯量系数,d0表示阻尼系数,s表示拉普拉斯算子,np表示下垂系数,ωref表示参考角速度,ωg表示母线角速度,pref表示同步发电机的参考功率,pe表示同步发电机的输出功率,if表示vsg的虚拟励磁电流,kp表示pi控制的比例系数,ki表示pi控制的积分系数,uref表示电压参考值,u表示逆变器输出的实际电压值,||u||表示逆变器输出的实际电压值的有效值,ua*、ub*、uc*分别表示输出的三相参考电压,表示同步发电机的参考相位角,mf表示vsg的虚拟互感。
14、在一种可能的实现方式中,所述参数信息为粒子位置信息,
15、对所述预设控制模型中的参数信息进行迭代更新,包括:
16、计算各个粒子的个体极值;
17、根据各个粒子的个体极值,确定各个粒子的位置信息;
18、根据各个粒子的位置信息与粒子群体的全局最优解,确定各个粒子的自适应因子;
19、根据所述自适应因子,确定各个粒子的自适应惯性权重值;
20、根据各个粒子的自适应惯性权重值,对各个粒子的速度和位置进行更新,得到新粒子群。
21、在一种可能的实现方式中,在根据各个粒子的自适应惯性权重值,对各个粒子的速度和位置进行更新之后,还包括:
22、对各个粒子进行交叉变异处理;
23、若交叉后的粒子中存在位置重复的粒子,则将重复的粒子更新为交叉变异处理前的粒子的位置。
24、在一种可能的实现方式中,所述根据各个粒子的个体极值,确定各个粒子的位置信息,包括:
25、若当前粒子的个体极值大于所述当前粒子上一迭代周期的个体极值时,则将所述当前粒子的个体极值设置为所述当前粒子的位置;
26、在获取所有粒子的个体极值之后,将所有个体极值中最大极值作为当前所有粒子的个体极值中的全局最优解;
27、若当前全局最优解大于上一迭代周期中的全局最优解时,则将当前全局最优解设置为粒子群体的全局最优解。
28、在一种可能的实现方式中,所述根据各个粒子的位置信息与粒子群体的全局最优解,确定各个粒子的自适应因子,包括:
29、分别计算各个粒子的位置向量与粒子群体的全局最优解间的距离,并将所述距离作为自适应因子。
30、在一种可能的实现方式中,所述分别计算各个粒子的位置向量与粒子群体的全局最优解间的距离,并将所述距离作为自适应因子,包括:
31、根据计算第k次迭代时第i个粒子的自适应因子;
32、其中,di(k)表示第k次迭代时第i个粒子的自适应因子,xij(k)表示第k次迭代时第i个粒子的位置向量的第j维分量,gij(k)表示第k次迭代时粒子群体的全局最优解的第j维分量。
33、在一种可能的实现方式中,根据所述自适应因子,确定各个粒子的自适应惯性权重值,包括:
34、根据确定各个粒子的自适应惯性权重值;
35、其中,εi(k)表示权值调节因子,a表示粒距调节系数,dmax(k)表示粒子群体粒距的最大值,dmin(k)表示粒子群体粒距的最小值,mi表示第i个粒子的自适应惯性权重值,a'表示调节因子系数,k表示权重调节系数,mmax表示权重系数的最大值,mmin表示权重系数的最小值。
36、在一种可能的实现方式中,所述根据各个粒子的自适应惯性权重值,对各个粒子的迭代速度和位置进行更新,包括:
37、根据
38、对各个粒子的迭代速度和位置进行更新;
39、其中,vij(k+1)表示第k+1次迭代时第i个粒子的迭代速度向量的第j维分量,vij(k)表示第k次迭代时第i个粒子的迭代速度向量的第j维分量,k1表示粒子的自我学习因子,random1表示第一随机数,pij(k)表示第k次迭代时第i个粒子的个体极值向量的第j维分量,k2表示粒子的社会学习因子,random2表示第二随机数,xij(k+1)表示第k+1次迭代时第i个粒子的位置向量的第j维分量,δt表示第k+1次迭代与第k次迭代时粒子的移动时间,λ1、λ2分别表示自我学习与社会学习的比重系数,θ表示相邻两次迭代的粒子群体粒距的差值系数,δxij(k)表示第k次迭代与第k-1次迭代时第i个粒子的位置向量差值。
40、本发明实施例提供一种分布式光伏主动支撑的方法,通过基于同步发电机,建立vsg系统仿真模型;获取预设控制模型中的参数信息;将参数信息赋值给vsg系统仿真模型中的惯量系数和阻尼系数,并运行vsg系统仿真模型;对vsg系统仿真模型中的指标值进行评估,当评估结果不满足预设条件,且预设控制模型的结束条件未满足时,对预设控制模型中的参数信息进行迭代更新,并跳转到“获取预设控制模型的中参数信息”步骤继续执行,否则流程终止,从而实现了采用预设控制模型对参数信息进行迭代更新,实现对vsg系统仿真模型中的惯量系数和阻尼系数的自适应更新,进一步优化了vsg系统仿真模型。预设控制模型与vsg系统仿真模型的结合对分布式光伏进行主动支撑,有效降低功率和频率的暂态波动幅值,从而有效提高系统频率的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!