一种低负荷辅机跳闸控制优化方法与流程
本发明涉及电力优化领域,具体涉及一种低负荷辅机跳闸控制优化方法。
背景技术:
1、低负荷辅助机(也称为低负荷辅助设备)通常是指在电力系统中,在基本负荷得到满足的情况下,用于支持特定运行模式、备用能力和系统稳定性的设备;
2、但现有技术中,低负荷辅助机在工作中,存在着能耗高、效率差的问题,而且要求人工干预频率高,自动性差,导致维护成本高,系统不稳定的问题;
3、为此,本案提出一种低负荷辅机跳闸控制优化方法,旨在在确保系统稳定性的前提下,最大限度地提高低负荷辅助机的效率和经济性。
技术实现思路
1、本发明的主要目的在于提供一种低负荷辅机跳闸控制优化方法,可以有效解决背景技术中的技术问题。
2、为实现上述目的,本发明采取的技术方案为:
3、一种低负荷辅机跳闸控制优化方法,该方法具体包括如下步骤:
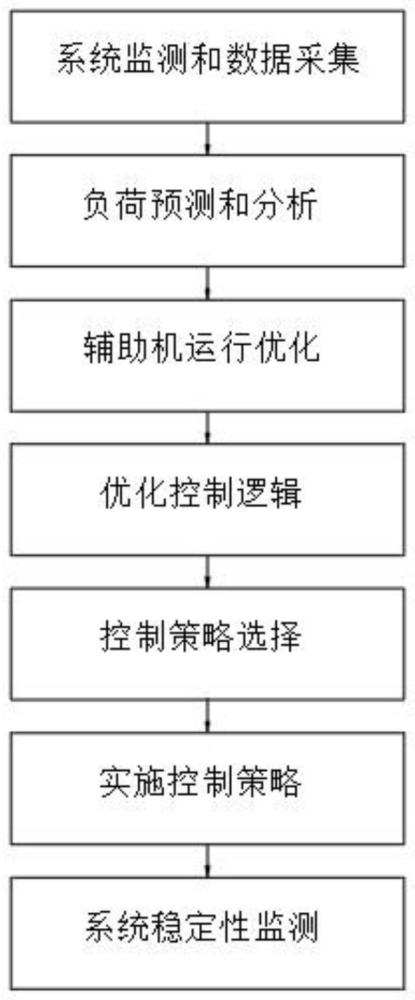
4、步骤一:系统监测和数据采集,安装传感器和监测设备,用于实时监测主要系统参数,并采集和记录监测数据,形成历史数据库,用于后续分析和决策;
5、步骤二:利用历史数据,应用时间序列分析,预测未来一段时间内的负荷情况,分析预测结果,识别存在低负荷情况和其发生的时间段;
6、步骤三:设定一个负荷阈值,当系统负荷低于该阈值时,被认为处于低负荷状态;
7、在低负荷状态下,考虑以下两种情况:
8、情况a:若低负荷状态持续时间较短,可以选择维持辅助机的运行,但调整其输出功率至较低水平,以保持系统稳定;
9、情况b:若低负荷状态持续时间较长,可以考虑停止辅助机运行,以降低无效能耗;
10、步骤四:制定控制逻辑,以自动响应低负荷状态,当系统监测到低负荷状态发生时,触发控制逻辑;
11、步骤五:控制策略选择,根据低负荷状态的预测时间长度,选择合适的控制策略,若预计低负荷状态较短暂,选择降低辅助机输出功率的策略,预计低负荷状态持续较长时间,选择停止辅助机运行的策略;
12、步骤六:实施控制策略,若选择降低输出功率的策略:
13、调整辅助机的运行参数,燃料供给、转速,以降低输出功率,但保持足够的响应速度,以应对负荷突增情况;
14、若选择停止运行的策略:
15、逐步减小辅助机的负荷,直至停止运行;
16、断开燃料供给、电力输入,确保辅助机安全停机;
17、步骤七:系统稳定性监测,在实施控制策略后,实时监测系统参数,确保辅助机的调整不会影响主系统的稳定性,若发现异常情况,及时进行干预,调整控制参数,恢复系统稳定。
18、作为本发明的进一步方案,所述步骤一中,传感器和监测设备具体包括如下:
19、电流传感器:用于测量电流的大小,可以帮助判断系统当前的负荷情况;
20、电压传感器:用于测量电压水平,有助于了解系统电压是否稳定;
21、频率传感器:用于监测电网频率的变化,频率异常暗示系统负荷变化;
22、温度传感器:用于监测设备和部件的温度,防止过热或过冷情况;
23、压力传感器:如果涉及到液体或气体流动,用于监测压力状态,如水流或气流;
24、速度传感器:对于机械系统,可以用来测量设备转速;
25、光传感器:用于检测光照强度,例如在光伏系统中用于监测太阳能辐射;
26、位置传感器:对于机械运动部件,可以用于检测位置信息;
27、数据记录仪:用于记录传感器采集到的数据,将其存储为历史数据以供分析;
28、网络通信设备:传感器需要将采集到的数据传输给控制系统。
29、作为本发明的进一步方案,所述步骤二中,时间序列分析方法采用移动平均法,用于去除噪音,揭示数据的趋势,用xt表示时间为t的电流值,n表示移动窗口的大小;
30、公式:
31、作为本发明的进一步方案,所述步骤三中,设置的负荷阈值为l,表示当负荷低于这个阈值时认为处于低负荷状态,在这种情况下,使用移动平均来检测低负荷状态是否发生,具体步骤如下:
32、计算移动平均:使用移动平均公式计算一段时间内的电流移动平均值mat;
33、判断低负荷状态:比较计算得到的移动平均值mat与负荷阈值l,如果mat小于l,则表示系统处于低负荷状态;
34、触发跳闸控制:当系统检测到处于低负荷状态时,根据步骤三中设置的控制策略,选择执行相应的控制操作,包括减小辅助机输出功率、停止辅助机运行。
35、作为本发明的进一步方案,所述步骤四中,优化控制逻辑的步骤如下:
36、识别低负荷状态:根据步骤三中设置的负荷阈值,编写代码或逻辑用于识别何时系统处于低负荷状态,涉及监测历史数据,比较当前负荷与阈值的关系;
37、选择控制策略:根据识别的低负荷状态,选择适当的控制策略,根据步骤三中的情况a和情况b,制定具体的控制方法;
38、情况a(短时低负荷):如果低负荷状态预计持续时间较短,可以选择减小辅助机输出功率,以降低系统运行成本,涉及调整燃料供给、转速参数;
39、情况b(长时低负荷):如果低负荷状态预计持续时间较长,考虑停止辅助机运行,以避免不必要的能耗,逐步降低辅助机负荷,并在达到安全停机状态时停止供电;
40、制定控制逻辑:将所选的控制策略转化为实际的控制逻辑,编写代码、配置控制参数,确保控制逻辑能够平稳地执行所选的策略,避免系统不稳定;
41、加入异常处理:考虑异常情况,包括控制失败、传感器故障,编写异常处理机制,在控制过程中,监测系统状态,及时采取行动以恢复正常运行;
42、模拟和测试:在实际应用之前,进行模拟和测试,使用历史数据或模拟数据,验证控制逻辑的正确性和效果;
43、优化和迭代:根据测试结果,进行优化和迭代,微调控制参数、调整阈值,以获得更好的控制效果;
44、记录和文档:记录所有的控制逻辑、参数设置、测试结果,用于日后的维护和改进。
45、作为本发明的进一步方案,所述步骤五中,选择控制策略时,据系统需求和目标,确定适合的控制策略,具体方法如下:
46、了解系统需求和目标:在选择控制策略之前,明确系统的需求和目标,其中包括节能、降低成本、维护系统稳定性;
47、分析低负荷状态特征:根据步骤三中设定的负荷阈值,分析低负荷状态的特征,了解低负荷状态的发生频率、持续时间,用于确定合适的策略;
48、情况a:降低辅助机输出功率:
49、识别阈值:为情况a设定一个阈值,表示何时将系统判断为低负荷状态,需要减小辅助机输出功率;
50、确定调整方式:根据阈值和历史数据,确定何时以及如何逐步减小辅助机的输出功率,同时涉及调整燃料供给、转速参数;
51、情况b:停止辅助机运行:
52、识别阈值:为情况b设定一个阈值,表示何时将系统判断为低负荷状态,需要停止辅助机运行;
53、逐步减小负荷:根据阈值和历史数据,逐步减小辅助机的负荷,直至达到安全停机状态;
54、断开供电:在辅助机安全停机状态下,断开燃料供给、电力输入,确保辅助机停机。
55、与现有技术相比,本发明低负荷辅机跳闸控制优化方法的主要目标是在低负荷状态下实现能耗降低、系统效率提高以及系统稳定性维护,通过结合多种步骤和策略,实现了以下有益效果:
56、通过优化控制逻辑,根据负荷情况动态调整辅助机运行状态,可以减少不必要的能源消耗,降低能源成本;
57、优化的控制策略可以使系统在低负荷状态下更加高效地运行,避免过度供电和能源浪费,从而提高整体系统效率;
58、减少辅助机的输出功率或停止运行可以降低燃料消耗和维护成本,尤其在长时间低负荷状态下,能够显著降低运行成本;
59、通过实施稳定性监测和优化控制策略,确保系统在低负荷状态下依然保持稳定运行,避免电压偏移、频率波动等问题;
60、优化方法结合了传感器、监测设备和自动控制逻辑,实现了在低负荷状态下自动地调整辅助机运行状态,减少人工干预;
61、基于时间序列分析和机器学习,优化方法具备预测低负荷状态的能力,能够更早地识别可能的低负荷情况,并做出及时响应;
62、通过降低能源消耗,优化方法可以减少环境污染和碳排放,对环境影响更小;
63、通过自动化控制和稳定性监测,优化方法可以降低人工运维的工作量,提升运维效率;
64、综上所述,低负荷辅机跳闸控制优化方法可以在低负荷状态下实现能源成本降低、系统效率提高、运行成本降低、系统稳定性维护等多方面的有益效果,为能源管理和系统运行带来显著的改进。
- 还没有人留言评论。精彩留言会获得点赞!