基于ESO的超螺旋滑模控制器设计方法与流程
本发明涉及电网领域,具体涉及一种基于eso的超螺旋滑模控制器设计方法。
背景技术:
1、近几十年来,随着经济和科技的发展,电网接入负荷数量迅速发展,使得现代电力系统日益复杂,电能质量问题日益频繁。人工智能公司、半导体公司或医院中的一些敏感负载或关键负载对电能质量有很高的需求,如果电能质量问题频繁发生可能会导致生产率下降、数据丢失、仪器损坏造成严重的经济损失。因此,电能质量问题逐渐成为各国学者的研究热点。
2、电能质量问题主要包括电压暂降/暂升、电压波动、闪变、谐波、中断等,其中发生最为频繁、范围最广的是电压暂降,根据ieee1346和ieee1159标准,电压暂降定义为交流电压均方根值下降到其额定电压的10%~90%,持续时间为0.01s~1min。对于敏感负载的电能质量保护,目前已经提出了多种解决方案,如动态电压恢复器(dvr)、统一电能质量调节器(upqc)、配电网静止补偿器(dstatcom)等。针对电压暂降或暂升,dvr被认为是最有效、最经济的解决方案。与其他补偿装置相比,dvr具有更快的响应特性和更小的占地面积。
3、采用超导磁体储能的动态电压恢复器(smes-dvr)具有更好的直流电压稳定性和更快的功率响应能力,可以解决电压暂降/暂升等短时电能质量问题,但从超导储能系统的角度来看,dvr并网逆变器部分可视为超导储能的电力电子负载,其具有非线性、参数不确定性、负载扰动等特点,使得传统控制器难以跟踪参考信号,并使直流链路电压保持在期望值,与其他储能型dvr相比,smes-dvr具有功率密度大、循环寿命长、自放电率低、对电流瞬态响应快等优点,适合快速、频繁的电压起伏补偿要求。
4、smes-dvr应采用适当的控制策略,以实现期望的响应速度快、鲁棒性高、稳态误差小、应用简单等目的。到目前为止,针对smes-dvr逆变器跟踪参考电流或电压的控制策略已经提出了多种,如比例积分(pi)控制器、模型预测控制器、模糊逻辑控制器、滞环控制器和滑模控制器,然而,对于smes-dvr储能dc-dc功率变换器中的参数不确定性和电压波动问题,目前还没有广泛而深入的研究。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于eso(扩张状态观测器)的超螺旋滑模控制器设计方法,以克服上述现有技术中的不足。
2、本发明解决上述技术问题的技术方案如下:一种基于eso的超螺旋滑模控制器设计方法,包括:
3、s11、建立包含外部负载不匹配扰动的smesdc-dc变换器的平均状态空间模型;
4、s12、利用eso对非匹配扰动进行估计;
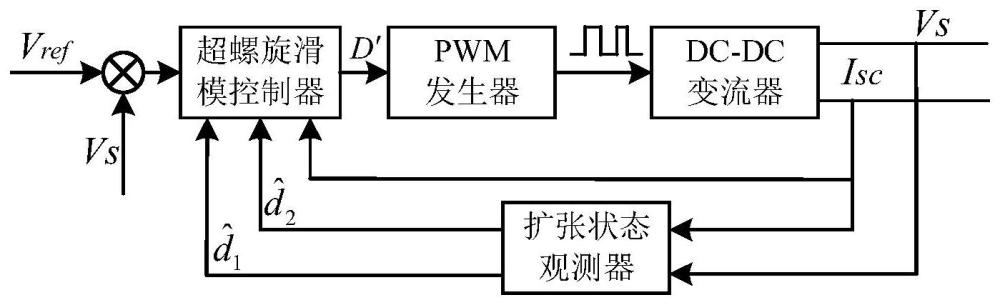
5、s13、基于eso和stsmc设计smesdc-dc变换器的超螺旋滑模控制器。
6、在上述技术方案的基础上,本发明还可以做如下改进。
7、进一步,dc-dc变换器由两个mosfet和两个二极管组成,通过改变mosfet的开通与关断来控制其工作状态;
8、dc/dc变换器中的参数和变量定义如下:
9、isc超导磁体输出电流
10、vs平均输出电容电压
11、vrefdc/dc变换器期望输出电压
12、rsc超导磁体内阻
13、rl负载实际阻抗值
14、lsc超导磁体电感值
15、c直流侧电容值
16、d占空比
17、r0负载标称阻抗值。
18、进一步,当系统正常运行时,假定此时负载阻抗为标称值r0,根据基尔霍夫电路定律,可以推导出dc-dc变换器的平均状态空间模型:
19、
20、表示超导磁体电流对时间的微分;
21、设d′=1-d和x1=vs-vref,然后公式可以重写成如下格式:
22、
23、其中并令可得:
24、
25、由于mosfet的导通电阻非常小,导通损耗和电压基本可以忽略不计,由式(2)和式(3)可得dc-dc变换器的平均状态空间模型为:
26、
27、
28、其中并且
29、进一步,基于扩张状态观测器的超螺旋滑模控制器设计过程如下:
30、基于smes中dc-dc变换器的平均状态空间模型,结合eso技术设计了x1和d1的非匹配扰动估计,其设计为:
31、
32、
33、其中,z1、z2为eso的输出,分别表示系统状态x1和扰动估计值,而β1,β2定义为满足条件β1>0、β2>0的观测器增益;
34、匹配扰动估计直接由导出,由下式给出:
35、
36、所设计滑模面:
37、
38、其中k>0;
39、滑模面的导数表示为:
40、
41、然后,将dc-dc变换器的平均状态空间模型公式(4)代入到(8)中:
42、
43、由式(8)和(9)可得,所提控制器设计如下:
44、
45、ueq=ηsgn(s) (11)
46、ust=-a1|s|1/2sgn(s)+u1
47、
48、
49、进一步,对设计控制器进行稳定性分析,具体如下:
50、假设1:对于dc-dc变换器的平均状态空间模型,假设集总扰动d1和d2有界,即存在一个大于0的常数dmax,满足dmax>|d1+d2|;
51、假设2:对于dc-dc变换器的平均状态空间模型,假设集总扰动有界且满足
52、引理1:考虑一个非线性系统,x表示系统状态,w代表总扰动,如果输入符合则状态符合
53、定理1:考虑dc-dc变换器的平均状态空间模型,选择式(5)、(6)、(10)、(13)的控制器,假设dc/dc变换器满足假设1和假设2,则控制律设计为(13);
54、证明:闭环系统稳定性分析包括对式(4)、(5)、(6)的dc-dc变换器闭环系统进行分析,选择如下的李雅普诺夫函数;
55、
56、根据式(7)对李雅普诺夫函数v求导,得到:
57、
58、将式(10)代入式(7)可得:
59、
60、将式(16)代入式(15)可得:
61、
62、简化公式(17)可得:
63、
64、其中
65、分两个部分,分别是和-s(a1|s|1/2sgn(s)+a2∫sgn(s)dτ).如果可以分别证明和-s(a1|s|1/2sgn(s)+a2∫sgn(s)dτ)的收敛性,则可以得出结论表明所设计的控制器稳定;
66、
67、假设dc-dc系统满足假设1和假设2,扰动的误差是输入到状态稳定的,由引理1可知由于集总扰动d1和d2是有界的,因此扰动估计误差也是有界的,故存在一个常数δ>0满足
68、根据式(19)和假设2可得,在任何初始条件下,当η>δ时,系统能够在有限的时间内收敛到滑模面s=0,从上述分析过程中可知闭环控制器全局渐近稳定。
69、本发明的有益效果是:
70、1)所设计的基于eso的超螺旋滑模控制器具有动态响应快、对参数变化具有较强的鲁棒性的优势,可以补偿与smes-dvr相关的参数不确定性和电压扰动;
71、2)与比例积分(pi)控制器相比,该控制器能够以更短的过渡时间和更小的超调量调节调节直流侧电压趋近目标值,而且由于扩张状态观测器对扰动的估计,基于超导储能的动态电压恢复器具有较强的抗干扰能力;
72、3)基于matlab/simulink的仿真结果表明,与pi控制器相比,采用所提出的smc控制器和fapi的smes-dvr能够及时补偿敏感负载的电压跌落/暂升,有效降低总谐波失真。
- 还没有人留言评论。精彩留言会获得点赞!