一种多芯集束电缆自动化剥线装置及剥线方法与流程
本发明涉及电缆剥线,特别涉及一种多芯集束电缆自动化剥线装置及剥线方法。
背景技术:
1、通信rf电缆组件在rf通讯中起到连接两个rf载体信号导通作的作用,有三部分组成,两端连接器以及中间部分电缆。为达到其柔软效果其电缆以编织网外导体的柔性电缆居多。
2、单芯同轴柔性电缆,如图1所示,主要由电缆内导体100、电缆绝缘介质200、电缆编织网外导体300以及电缆护套400组成。对于这种单芯同轴柔性电缆,由于电缆各部件组成为同轴心的环形组成,采用如图2所示的刀具旋转切割就能够实现剥线的目的。
3、该剥线装置是利用电缆为圆周同轴构造外圆上各个点到电缆轴线的距离一致,通过电缆固定夹持部位对电缆固定,高速旋转刀夹带动切割刀片圆周高速旋转,切入电缆护套400,再向另一端位移动作拉扯电缆护套400实现电缆剥皮动作。
4、而多芯集束电缆的结构如图3所示,多芯集束电缆由于内部是多个单芯电缆500集束在一起,表面多芯电缆护套600会沿着多股电缆的最高点形成多边形,该多芯电缆护套600就无法采用图2所示的剥线装置的刀具圆周旋转切削方法实现剥线了。所以亟需一种能够对多芯集束电缆表面的多芯电缆护套600进行剥离的剥线装置。
技术实现思路
1、本发明的目的在于提供一种多芯集束电缆自动化剥线装置及剥线方法,用于剥离多芯集束电缆表面的多边形多芯电缆护套。
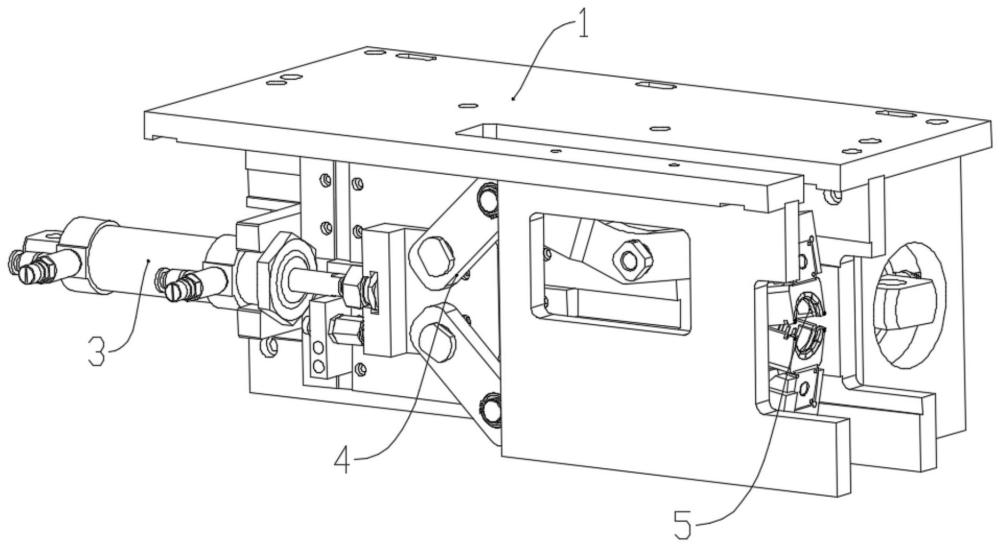
2、为解决上述技术问题,本发明提供了一种多芯集束电缆自动化剥线装置,包括支架、夹断组件和剥离气缸;
3、所述夹断组件安装于所述支架的一侧,通过所述夹断组件将多芯集束电缆表面的多芯电缆护套夹断;
4、所述剥离气缸安装于所述支架的另一侧,并且所述剥离气缸的伸缩杆与所述夹断组件连接,通过所述剥离气缸驱动所述夹断组件水平移动,从而剥离夹断的多芯电缆护套。
5、优选的,所述夹断组件包括夹断气缸、夹断驱动臂以及夹断头,所述夹断驱动臂一端与所述夹断气缸的伸缩杆连接,另一端与所述夹断头连接,在所述夹断气缸的驱动下,由所述夹断驱动臂带动所述夹断头夹断多芯集束电缆表面的多芯电缆护套。
6、优选的,所述夹断驱动臂设置有两组,并且每组所述夹断驱动臂前端均设置有所述夹断头,在所述夹断气缸的驱动下,两组所述夹断驱动臂带动两组所述夹断头抱夹夹断多芯集束电缆表面的多芯电缆护套。
7、优选的,两组所述夹断驱动臂对称设置,并且在所述夹断气缸的驱动下两组所述夹断驱动臂同步动作,相互靠近,以使得两组所述夹断头抱夹夹断多芯集束电缆表面的多芯电缆护套。
8、优选的,所述夹断驱动臂包括第一驱动臂杆和第二驱动臂杆,所述第一驱动臂杆的一端通过转轴与所述夹断气缸的伸缩杆连接,另一端通过转轴与所述第二驱动臂杆的端部转动连接,而所述夹断头安装于所述第二驱动臂杆远离所述第一驱动臂杆的一端;
9、所述夹断气缸的伸缩杆端部设置有滑移板,两根所述第一驱动臂杆的端部分别通过转轴与滑移板转动连接;
10、所述第二驱动臂杆中部通过转轴与固定板转动连接,并且所述滑移板在所述固定板上沿水平方向来回移动;
11、当所述夹断气缸的伸缩杆回缩时,所述滑移板驱动两根所述第一驱动臂杆朝向所述夹断气缸方向运动,从而带动两根所述第二驱动臂杆与所述第一驱动臂杆连接端相互靠近,与所述夹断头连接端相互远离,以使得多芯集束电缆从两组所述夹断头之间穿过;
12、当所述夹断气缸的伸缩杆伸出时,所述滑移板驱动两根所述第一驱动臂杆朝向所述第二驱动臂杆方向运动,从而带动两根所述第二驱动臂杆与所述第一驱动臂杆连接端相互远离,与所述夹断头连接端相互靠近,以使得两组所述夹断头夹断多芯集束电缆表面的多芯电缆护套。
13、优选的,所述第二驱动臂杆为弧形杆或v形杆,中部通过转轴与固定板转动连接,随着所述第一驱动臂杆驱动所述第二驱动臂杆一端的运动,以使得另一端的两组所述夹断头相互靠近或远离。
14、优选的,所述夹断头包括夹断头本体和安装座,所述夹断头本体通过所述安装座可拆卸地连接于所述第二驱动臂杆的端部;
15、所述夹断头本体中开设有半圆形通槽,在半圆形通槽内部依次设置有链状切断刀、聚氨酯橡胶夹持部以及夹持逆齿,当两组所述夹断头相互靠近时,所述链状切断刀夹断多芯集束电缆表面的多芯电缆护套,并通过所述聚氨酯橡胶夹持部以及所述夹持逆齿剥离夹断的多芯电缆护套。
16、优选的,所述链状切断刀安装于所述夹断头本体的刀槽中,且所述链状切断刀处于自由状态,贴合接触所述多芯集束电缆的多边形表面。
17、优选的,所述链状切断刀包括多个带有刃口的刀片,多个所述刀片依次连接形成半圆弧形的链状切断刀,并且通过中间销轴转动连接;
18、所述链状切断刀两端设置有端部销轴,并通过所述端部销轴与所述夹断头本体的刀槽转动连接,以使得半圆弧形的链状切断刀除两端以外处于自由状态。
19、本发明还提供了一种多芯集束电缆自动化剥线装置的剥线方法,包括如下步骤:
20、步骤一:首先将待剥线的多芯集束电缆通过输送机构送至该多芯集束电缆自动化剥线装置中;
21、步骤二:启动剥离气缸使其伸缩杆回缩,以使得夹断组件移动至初始位置;
22、步骤三:接着启动夹断气缸使其伸缩杆回缩,滑移板驱动两根第一驱动臂杆朝向夹断气缸方向运动,从而带动两根第二驱动臂杆与第一驱动臂杆连接端相互靠近,与夹断头连接端相互远离,以供多芯集束电缆穿过;
23、步骤四:待剥线的多芯集束电缆端部从两组夹断头之间穿过,直至多芯集束电缆待剥线的位置至于两组夹断头中;
24、步骤五:随后再次启动夹断气缸使其伸缩杆伸出,滑移板驱动两根第一驱动臂杆朝向第二驱动臂杆方向运动,从而带动两根第二驱动臂杆与第一驱动臂杆连接端相互远离,与夹断头连接端相互靠近,以使得两组夹断头夹断多芯集束电缆表面的多芯电缆护套;
25、步骤六:在两组夹断头相互靠近的过程中,聚氨酯橡胶夹持部先接触多芯集束电缆表面,并固定待剥线的位置;然后链状切断刀与多芯集束电缆的表面接触并向内切断多芯电缆护套;
26、步骤七:在链状切断刀与多芯集束电缆的表面接触时,多个刀片处于自由状态贴合接触多芯集束电缆的多边形表面;
27、步骤八:随着两组夹断头的不断靠近,刀片的刃口切入多芯电缆护套,直至即将切断时停止;
28、步骤九:然后启动夹断气缸使其伸缩杆回缩一小段距离,以使得两组夹断头中的链状切断刀远离多芯集束电缆的表面,而夹持逆齿嵌入多芯集束电缆的多芯电缆护套;
29、步骤十:最后再次启动剥离气缸使其伸缩杆伸出,带动夹断组件朝向终点方向运动,从而剥去多芯集束电缆的多芯电缆护套。
30、与现有技术相比,本发明的有益效果是:
31、1.电缆由于内部是多个单芯电缆集束在一起,表面电缆护套会沿着多股电缆的最高点形成多边形,通过本发明的剥线装置的夹断组件中链状切断刀能够切断多边形的电缆护套,具体为多个刀片依次连接形成半圆弧形的链状切断刀,并且通过中间销轴转动连接使得半圆弧形的链状切断刀除两端以外处于自由状态,在链状切断刀与多芯集束电缆的表面接触时,多个刀片处于自由状态贴合接触多芯集束电缆的多边形表面,从而切断多边形的电缆护套;
32、2.本发明多芯集束电缆自动化剥线装置的夹断头本体通过安装座可拆卸地连接于第二驱动臂杆的端部,当需要对不同直径的电缆进行剥线时,只需要更换不同规格的夹断组件即可实现,大大提高了该多芯集束电缆自动化剥线装置的实用性;
33、3.通过本发明提供的多芯集束电缆自动化剥线装置的剥线方法,能够快速剥离多芯集束电缆外部多边形的多芯电缆护套而不伤及内部结构,从而填补了多芯集束电缆自动化剥线领域的空白。
- 还没有人留言评论。精彩留言会获得点赞!