新能源电力系统动态稳定主动阻尼控制方法及系统
本发明涉及新能源电力系统,尤其涉及一种新能源电力系统动态稳定主动阻尼控制方法及系统。
背景技术:
1、随着新能源电力系统的发展,大规模风电机组并入电网,这给风电机组内部带来了更多的能量流动,也更容易诱发低频振荡。目前,新能源电力系统中的直驱风场宽频振荡的有效抑制措施较为匮乏,通常采用被动切机的方式以保证系统稳定运行,此方法不仅导致了风电出力的严重浪费,而且造成了巨大的经济损失。因此,研究直驱风场抑制次/超同步振荡的主动控制方法势在必行。现有控制策略大多仅针对单一振荡频率,难以实现多振荡模态的自适应控制,且大多忽视了控制器参数变化后对机组基频特性及动态响应特性的影响,难以保证系统在其他工况下的稳定运行。
2、因此,现有的振荡抑制方法存在抑制效果不准确,难以保证系统稳定运行。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种新能源电力系统动态稳定主动阻尼控制方法及系统,用以解决现有振荡抑制方法存在抑制效果不准确,难以保证系统稳定运行的问题。
2、一方面,本发明实施例提供了一种新能源电力系统动态稳定主动阻尼控制方法,包括以下步骤:
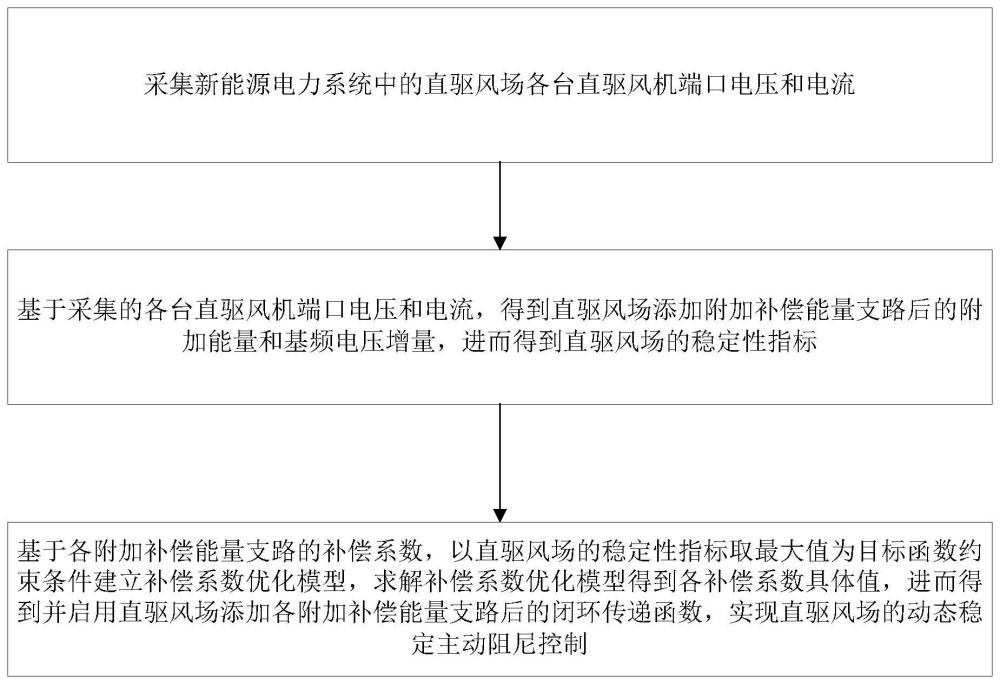
3、采集新能源电力系统中的直驱风场各台直驱风机端口电压和电流;
4、基于采集的各台直驱风机端口电压和电流,得到直驱风场添加附加补偿能量支路后的附加能量和基频电压增量,进而得到直驱风场的稳定性指标;
5、基于各附加补偿能量支路的补偿系数,以直驱风场的稳定性指标取最大值为目标函数约束条件建立补偿系数优化模型,求解补偿系数优化模型得到各补偿系数具体值,进而得到并启用直驱风场添加各附加补偿能量支路后的闭环传递函数,实现直驱风场的动态稳定主动阻尼控制。
6、进一步地,所述添加的附加补偿能量支路包括:
7、附加补偿能量支路vp2:将直驱风机端口电流q轴初始分量经第一调节方式后得到的第一电压补偿项输入至系统的转子侧d轴电流处;
8、附加补偿能量支路vi1:将直驱风机端口电流q轴初始分量经第二调节方式后得到的第二电压补偿项输入至系统的转子侧d轴电流处;
9、附加补偿能量支路vl1:将直驱风机端口电流q轴初始分量经第三调节方式后得到的第三电压补偿项输入至系统的转子侧q轴电流处。
10、进一步地,
11、所述第一电压补偿项δudc1表示为:
12、
13、式中,kp2、ki2分别为电流环的比例系数和积分系数,kpθ、kiθ分别为锁相环的比例系数和积分系数,ls、lm分别为风机线路出口侧和并网点网侧环流器端的等效电感,uds0为直驱风机端口电压d轴初始分量,iqs0为直驱风机端口电流q轴初始分量;
14、所述第二电压补偿项δudc2表示为:
15、
16、所述第三电压补偿项δudc3表示为:
17、
18、式中,ws表示风场全局dqs坐标下直驱风机端口dq轴电流的振荡频率。
19、进一步地,所述补偿系数优化模型,表示为:
20、
21、
22、式中,f2表示稳定性指标,kvh表示第h条附加补偿能量支路的补偿系数;wvh表示第h条附加补偿能量支路的附加能量;表示第h条附加补偿能量支路的基频电压增量;nv表示附加补偿能量支路的数量,kvhmin、kvhmax分别表示第h条附加补偿能量支路补偿系数的最小值和最大值,un表示直驱风机端口额定电压。
23、进一步地,所述附加补偿能量支路的数量nv为3;基于下述约束得到各附加补偿能量支路补偿系数的最小值和最大值:
24、
25、式中,kv1、kv2、kv3分别表示附加补偿能量支路vp2、vi1和vl1的补偿系数,ξt表示附加补偿能量支路vp2和vi1的阻尼比;fpic表示附加补偿能量支路vp2和vi1的控制带宽;flc表示附加补偿能量支路vl1的控制带宽,lw表示出线电抗。
26、进一步地,所述直驱风场添加各附加补偿能量支路后的闭环传递函数,表示为:
27、
28、
29、式中,tvpi(s)、tvli(s)分别表示第一、第二闭环传递函数,s表示拉普拉斯算子。
30、进一步地,所述附加补偿能量支路的附加能量表示为:
31、
32、
33、
34、式中,wv1、wv2、wv3分别表示附加补偿能量支路vp2、vi1和vl1的附加能量,kp2、ki2分别为电流环的比例系数和积分系数,idc、iqc分别表示控制系统dqc坐标下直驱风机端口的d、q轴电流,表示控制系统dqc坐标下直驱风机端口的d轴电流参考值,δθpll表示锁相环动态角,w2表示电网频率。
35、进一步地,所述附加补偿能量支路的基频电压增量表示为:
36、
37、
38、
39、式中,分别表示在基频下附加补偿能量支路vp2、vi1和vl1的基频电压增量。
40、进一步地,通过以下步骤求解所述补偿系数的具体值:
41、s31、设置补偿系数kv1、kv2和kv3初值,判断是否满足补偿系数优化模型中的约束条件,若满足,则该补偿系数为可行解x1,同时作为当前最优解y1,若不满足,重新确定初值直到找到可行解x1;
42、s32、在当前最优解yd的基础上,应用模式搜索更新补偿系数,满足补偿系数优化模型中的约束条件得到新的可行解xd+1,计算目标函数f2,若满足则xd+1为下一次迭代的当前最优解;反之则重复步骤s32;其中,d表示迭代次数,初值设置为1;
43、s33、重复步骤s32中的搜索过程,直到满足迭代次数,终止搜索,将当前最优解作为各附加补偿能量支路的补偿系数的取值。
44、另一方面,本发明实施例提供了一种新能源电力系统动态稳定主动阻尼控制系统,包括:
45、数据采集模块,用于采集新能源电力系统中的直驱风场各台直驱风机端口电压和电流;
46、稳定性指标获取模块,用于基于采集的各台直驱风机端口电压和电流,得到直驱风场添加附加补偿能量支路后的附加能量和基频电压增量,进而得到直驱风场的稳定性指标;
47、主动阻尼控制模块,用于基于各附加补偿能量支路的补偿系数,以直驱风场的稳定性指标取最大值为目标函数约束条件建立补偿系数优化模型,求解补偿系数优化模型得到各补偿系数具体值,进而得到并启用直驱风场添加各附加补偿能量支路后的闭环传递函数,实现直驱风场的动态稳定主动阻尼控制。
48、与现有技术相比,本发明有益效果如下:
49、本发明提供的一种新能源电力系统动态稳定主动阻尼控制方法及系统,通过在原直驱风场结构的基础上增加三条附加补偿能量支路,通过采集直驱风场中各风机端口的电压和电流,得到直驱风场添加附加补偿能量支路后的附加能量和基频电压增量,进而得到直驱风场的稳定性指标;继而建立补偿系数优化模型,通过求解补偿系数优化模型得到各补偿系数具体值,进而得到并启用直驱风场添加各附加补偿能量支路后的闭环传递函数,实现直驱风场的动态稳定主动阻尼控制,对振荡的抑制效果更加准确,能够保证系统的稳定运行;通过添加附加补偿能量支路,对转子电流的直接补偿能够直接改变风机的能量,从而改变了风机的阻尼水平,提高风场耐受振荡能力,抑制低频振荡发展,并且附加补偿能量支路对风场遭受不同类型的扰动均能实现数秒内实现快速抑制,避免系统因振荡幅值过大失稳,提高了风场功角稳定性。
50、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!