一种模糊自适应的电机滑模控制系统及方法与流程
本发明涉及一种模糊自适应的电机滑模控制系统及方法。
背景技术:
1、无刷直流电机是机器人关节控制系统的重要组成部分,无刷直流电机作为其主要执行机构,是一种多变量、非线性以及强耦合的复杂系统。无刷直流电动机在正常驱动运行中需要转子位置信号以实现正确换相点的捕捉;同时通过转速传感器获取转速反馈信号,实现转速环的闭环控制。
2、传统pid控制器虽然不依赖于对象模型,且控制结构简单、可靠性高、易于工程实现等优点,但在强干扰或具有高度非线性和不确定性时调节随动性差的缺点;很难实现使电机具有较好的响应速度和较小的超调量。
技术实现思路
1、本发明的目的在于克服现有的缺陷而提供的一种模糊自适应的电机滑模控制系统及方法,模糊自适应算法与滑模控制结合,使电机具有较好的响应速度和较小的超调量,具有控制灵活、算法简单、参数适应性广的优点。
2、实现上述目的的技术方案是:
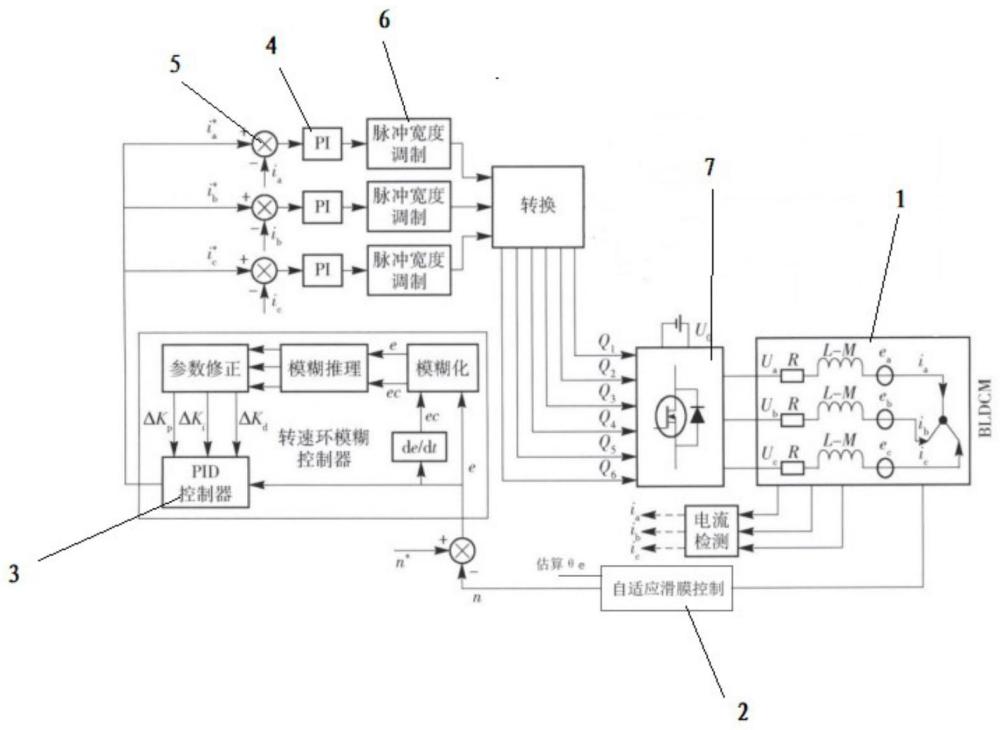
3、本发明之一的一种模糊自适应的电机滑模控制系统,采用转速、电流双闭环控制,外环为速度环,通过设计的模糊自适应的滑模控制器进行电机转速调节,内环为电流环,采用pi控制器分别进行三相电流的调节,所述模糊自适应的滑模控制器由两部分组成,一部分是模糊自适应pid(全称:proportion integration differentiation,比例积分微分控制)算法模型,另一部分是自适应滑模控制器,这两部分共同作用进行转速调节,包括:
4、无刷直流电机,用于输出三相绕组电流ia、ib、ic;
5、自适应滑膜控制模块,用于同步所述无刷直流电机的位置信号以及转子转速;
6、pid控制器,用于模糊控制器进行pid参数自整定;
7、pi控制器,基于三相绕组电流ia、ib、ic,通过对电流环进行调节后,得到旋转正交坐标系下给定的电机电压,将电机电压变换得到静止两相正交坐标系下给定的所述无刷直流电机电机电压;
8、脉冲宽度调制模块,用于将电机电压进行空间矢量变换,输出pwm波形到三相逆变器;
9、所述三相逆变器,用于控制所述无刷直流电机进行转速调节。
10、优选的,所述pid控制器中,从所述自适应滑膜控制模块得到的输出及其变化率,作为所述pid控制器的输入经过模糊化处理和模糊推理,再进行解模糊处理,从所述pid控制器出来的参数δkp、δki、δkd叠加在传统的kp、ki、kd参数上,用于动态调整pid参数。
11、本发明之二的一种模糊自适应的电机滑模控制方法,采用转速、电流双闭环控制,外环为速度环,通过设计的模糊自适应的滑模控制器进行电机转速调节,内环为电流环,采用pi控制器分别进行三相电流的调节,所述模糊自适应的滑模控制器由两部分组成,一部分是模糊自适应pid算法模型,另一部分是自适应滑模控制器,包括:
12、步骤s1,搭建模糊自适应pid算法模型;
13、步骤s2,搭建自适应滑模控制器;
14、步骤s3,通过设计的模糊自适应pid算法的自适应滑模控制器进行电机转速调节。
15、优选的,所述步骤s1包括:
16、步骤s11,确定语言变量隶属度函数;
17、步骤s12,建立模糊控制规则表;
18、步骤s13,通过mamdani推理法(模糊推理法)对隶属度函数进行模糊推理;
19、步骤s14,通过重心法进行解模糊运算,对pid的三个参数进行在线调整,即搭建完成模糊自适应pid算法模型。
20、优选的,所述步骤s11中,模糊变量的隶属度函数选择三角形,输入、输出变量的模糊论域均为[-6,6],量化等级均为13级,即{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},取输入输出语言变量的模糊子集为负大、负中、负小、零、正小、正中、正大,分别用nb、nm、ns、zo、ps、pm、pb表示。
21、优选的,所述步骤s12中,模糊控制规则是对专家经验和操作者技能加以总结得出的模糊条件语句集合,模糊pid参数δkp、δki、δkd的自整定规则如下:
22、当偏差e较大时,为使尽快消除偏差,不管ec的符号如何都应取较大的kp、ki,以达到快速缩小偏差的目的,若此时偏差e和偏差变化率ec符号相反,则应取较小的kd或令kd为0,反之,若此时偏差e和偏差变化率ec符号相同,则应取较大的kd,阻止偏差继续变大;
23、当偏差e适中时,为防止超调量过大,应取较小的kp,而ki取中等程度值,若此时偏差e和偏差变化率ec符号相反,则应取较大的kd,反之则取适中的kd阻止偏差继续变大;
24、当系统偏差e较小或为0时,为缩短调节时间,可取适中的kp、较小的ki,若此时偏差e和偏差变化率ec符号相反,则可取较小的kd,反之可取适中的kd。
25、优选的,所述步骤s13中,隶属度函数公式为:
26、
27、式中,x、y分别表示模糊论域上模糊集合a、b中的任意元素;μa(x)、μb(y)分别表示模糊论域上模糊集合a、b的隶属度函数;表示模糊集合a→b映射的隶属度函数;
28、即输出b′的隶属度函数为:
29、
30、式中,sup表示对后面算式结果当x、y在模糊集合a、b中变化时取其上确界,当模糊论域为有限论域时sup取大运算v;α=∨x∈x{μa′(x)∧μa(x)}是指模糊集合a′与a交集的高度,可以表示为:
31、α=h(a′∩a)。
32、优选的,所述步骤s14中,通过重心法进行解模糊运算,取模糊隶属度函数曲线与横坐标围成面积的重心作为代表点,计算公式如下:
33、
34、式中,y0表示解模糊化计算输出值,通过实时检测偏差和偏差变换率两个变量,并将其量化到相应的模糊论域,再到模糊控制规则表中查找各个参数的相应修正值,完成pid3个参数的在线调整。
35、优选的,所述步骤s2包括:
36、步骤s21,根据数学模型和控制目标,设计一个滑动面;
37、步骤s22,根据滑动面设计一个控制律使得系统状态在滑动面上滑动;
38、步骤s23,根据设计的控制律,实现自适应滑模控制器。
39、优选的,所述步骤s21中,搭建反电势滑模观测器运行于滑模面上,
40、搭建反电势滑模观测器的公式如下:
41、
42、式中,^表示观测值,为符号函数;
43、滑模面函数如下:
44、
45、反电势滑模观测器误差计算如下:
46、
47、式中,ei为定子电流观测误差,为反电势观测误差,
48、反电势滑模观测器进入滑模状态的条件为:
49、
50、得到滑模增益的取值范围:
51、
52、考虑到在恒转矩运行阶段,无刷直流电机反电势幅值小nudc/nn,其中n为电机当前运行转速,nn为电机额定转速,udc为直流母线电压,实际进行滑模观测时可将反电势观测值、限幅到±nudc/nn,定子电阻值大于0,且其变化范围一般不会超过100%,应将电阻观测值限幅为0~2r,可取电机电阻标称值,故滑模增益取值范围可进一步明确为:
53、
54、反电势滑模观测器误差公式简化如下:
55、
56、z=-k1sgn(ei)为开关函数;
57、出反电势观测误差方程,具体为:
58、
59、反电势观测误差将随时间以指数形式收敛到0,最终观测值等于实际反电势e。
60、优选的,所述步骤s22中,控制律包括两个部分:滑动面的控制和滑模调节器,滑动面的控制用于使系统状态迅速进入滑动模态,滑模调节器用于保持系统状态在滑动面上滑动。
61、本发明的有益效果是:本发明通过将模糊自适应算法与滑模控制结合对电机转速进行调节,既继承了传统pid控制不依赖于对象模型、控制结构简单、可靠性高、易于工程实现等优点,又克服了传统pid控制器在强干扰或具有高度非线性和不确定性时调节随动性差的缺点,同时在硬件上无需位置和速度传感器,大大改善了控制器的性能,本发明算法控制的电机转速响应快、基本无超调、转速波动小、调节时间短且干扰能力强,大大提高了无刷直流电机调速系统的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!