电机飞车启动方法、装置、电机控制器及存储介质与流程
本技术涉及电机控制,特别涉及一种电机飞车启动方法、装置、电机控制器及存储介质。
背景技术:
1、随着电力电子技术发展,对永磁同步电机变频器的性能和永磁同步电机驱动系统的成本要求越来越高,永磁同步电机无速度矢量控制由于其高性能以及低成本等特点,应用范围也越来越广泛。
2、然而,在风机等应用场景,有些风机受风道影响无法停机,另外在某些工况下需要在永磁同步电机未完全静止的条件下,尽快启动电机来保证生产的安全性,否则影响生产设备和生产人员的安全。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种电机飞车启动方法,根据电机的三相电流和三相电压对转子角度进行估计,并将电流环的d轴给定电流和q轴给定电流设置为0,使得转速环介入,完成飞车启动,然后切换至无速度矢量控制,实现了无速度传感器矢量控制飞车启动。
2、本发明的第二个目的在于提出一种计算机可读存储介质。
3、本发明的第三个目的在于提出一种电机控制器。
4、本发明的第四个目的在于提出一种电机飞车启动装置。
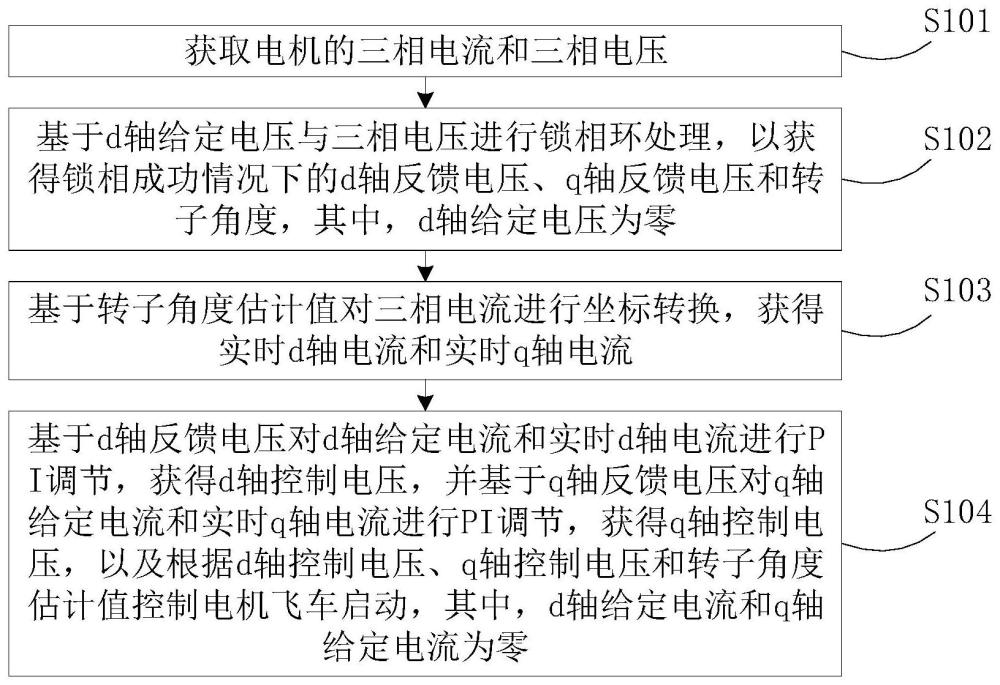
5、为达上述目的,根据本发明第一方面实施例提出了一种电机飞车启动方法,包括:获取电机的三相电流和三相电压;基于d轴给定电压与三相电压进行锁相环处理,以获得锁相成功情况下的d轴反馈电压、q轴反馈电压和转子角度,其中,d轴给定电压为零;基于转子角度估计值对三相电流进行坐标转换,获得实时d轴电流和实时q轴电流;基于d轴反馈电压对d轴给定电流和实时d轴电流进行pi调节,获得d轴控制电压,并基于q轴反馈电压对q轴给定电流和实时q轴电流进行pi调节,获得q轴控制电压,以及根据d轴控制电压、q轴控制电压和转子角度估计值控制电机飞车启动,其中,所述d轴给定电流和所述q轴给定电流为零
6、根据本发明实施例的电机飞车启动方法,获取电机的三相电流和三相电压,并基于d轴给定电压与三相电压进行锁相环处理,以获得锁相成功情况下的d轴反馈电压、q轴反馈电压和转子角度,d轴给定电压为0,使得d轴分量为0,对三相电压进行锁相,得到转子角度,实现了对转子位置进行估计,以及基于d轴反馈电压对d轴给定电流和实时d轴电流进行pi调节,获得d轴控制电压,并基于q轴反馈电压对q轴给定电流和实时q轴电流进行pi调节,获得q轴控制电压,并根据d轴控制电压、q轴控制电压和转子角度估计值控制电机飞车启动,其中,d轴给定电流和q轴给定电流为0,因为电流环的给定电流为0,使得实时d轴电流和q轴电流接近0,此时转速环介入,完成飞车启动到无速度矢量控制的切换,实现了无速度传感器矢量控制飞车启动。
7、根据本发明的一个实施例,基于d轴给定电压与三相电压进行锁相环处理,包括:基于转子角度对三相电压进行坐标转换,获得d轴反馈电压和q轴反馈电压;基于d轴给定电压与d轴反馈电压之间的差值进行pi调节和积分计算,获得转子角度。
8、根据本发明的一个实施例,确定锁相成功,包括:根据d轴反馈电压和q轴反馈电压确定转子位置误差绝对值;在确定转子位置误差绝对值满足预设条件的情况下,判断锁相成功。
9、根据本发明的一个实施例,确定转子位置误差绝对值满足预设条件,包括:在转子位置误差绝对值连续在第一预设时间内小于预设门槛阈值的情况下,确定转子位置误差绝对值满足预设条件。
10、根据本发明的一个实施例,基于d轴反馈电压对d轴给定电流和实时d轴电流进行pi调节,包括:对d轴给定电流与实时d轴电流的电流差值进行pi调节,并将d轴反馈电压作为前馈电压赋值给积分项的初始值。
11、根据本发明的一个实施例,基于q轴反馈电压对q轴给定电流和实时q轴电流进行pi调节,包括:对q轴给定电流与实时q轴电流的电流差值进行pi调节,并将q轴反馈电压作为前馈电压赋值给积分项的初始值。
12、根据本发明的一个实施例,根据d轴控制电压、q轴控制电压和转子角度估计值控制电机飞车启动,包括:根据d轴控制电压、q轴控制电压和转子角度估计值控制电机启动,并确定电机的转速估计值;在实时d轴电流和实时q轴电流连续在第二预设时间内分别小于预设电流阈值的情况下,将转速估计值作为给定转速对电机进行转速环控制。
13、根据本发明的一个实施例,预设电流阈值基于电机的额定电流进行确定。
14、根据本发明的一个实施例,在获取电机的三相电压之后,方法还包括:根据三相电压计算电机的反电动势有效值;在反电动势有效值大于预设电压阈值的情况下,确定电机需要进行飞车启动。
15、根据本发明的一个实施例,预设电压阈值基于电机的额定电压进行确定。
16、为达上述目的,根据本发明第二方面实施例提出了一种计算机可读存储介质,其上存储有电机飞车启动程序,该飞车启动程序被处理器执行时实现前述任一实施例的电机飞车启动方法。
17、根据本发明实施例的计算机可读存储介质,通过执行上述电机飞车启动方法的计算机程序,根据电机的三相电流和三相电压对转子角度进行估计,并将电流环的d轴给定电流和q轴给定电流设置为0,使得转速环介入,完成飞车启动,然后切换至无速度矢量控制,实现了无速度传感器矢量控制飞车启动。
18、为达上述目的,根据本发明第三方面实施例提出了一种电机控制器,包括:存储器、处理器及存储在存储器上并可在处理器上运行的电机飞车启动程序,处理器执行飞车启动程序时,实现前述任一实施例的电机飞车启动方法。
19、根据本发明实施例的电机控制器,通过处理器执行上述电机飞车启动方法的计算机程序,根据电机的三相电流和三相电压对转子角度进行估计,并将电流环的d轴给定电流和q轴给定电流设置为0,使得转速环介入,完成飞车启动,然后切换至无速度矢量控制,实现了无速度传感器矢量控制飞车启动。
20、为达上述目的,根据本发明第四方面实施例提出了一种电机飞车启动装置,包括:获取模块,用于获取电机的三相电流和三相电压;锁相环模块,用于基于d轴给定电压与三相电压进行锁相环处理,以获得锁相成功情况下的d轴反馈电压、q轴反馈电压和转子角度,其中,d轴给定电压为零;坐标转换模块,用于基于转子角度估计值对三相电流进行坐标转换,获得实时d轴电流和实时q轴电流;控制模块,用于基于d轴反馈电压对d轴给定电流和实时d轴电流进行pi调节,获得d轴控制电压,并基于q轴反馈电压对q轴给定电流和实时q轴电流进行pi调节,获得q轴控制电压,以及根据d轴控制电压、q轴控制电压和转子角度估计值控制电机飞车启动,其中,d轴给定电流和q轴给定电流为零。
21、根据本发明实施例的电机飞车启动装置,通过获取模块相电流和三相电压,并通过锁相环模块基于d轴给定电压与三相电压进行锁相环处理,以获得锁相成功情况下的d轴反馈电压、q轴反馈电压和转子角度,d轴给定电压为0,使得d轴分量为0,对三相电压进行锁相,得到转子角度,实现了对转子位置进行估计,以及通过控制模块基于d轴反馈电压对d轴给定电流和实时d轴电流进行pi调节,获得d轴控制电压,并基于q轴反馈电压对q轴给定电流和实时q轴电流进行pi调节,获得q轴控制电压,并根据d轴控制电压、q轴控制电压和转子角度估计值控制电机飞车启动,其中,d轴给定电流和q轴给定电流为0,因为电流环的给定电流为0,使得实时d轴电流和q轴电流接近0,此时转速环介入,完成飞车启动到无速度矢量控制的切换,实现了无速度传感器矢量控制飞车启动。
22、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!