直驱风电机组的跟网型控制到构网型控制的延时补偿切换方法
本发明属于风力发电并网系统运行与控制领域,具体涉及一种针对直驱风电机组跟网型控制到构网型控制的延时补偿切换方法。
背景技术:
1、直驱风电机组由于没有齿轮箱和励磁控制系统,具有较高的可靠性和效率,逐渐成为了风力发电系统的主流机型之一。跟网型控制策略可以为系统提供较快的动态响应,直驱风电机组大多应用了跟网型控制策略。然而,在负载投切的情况下,跟网型控制不能为直驱风电机组并网系统提供良好的频率支撑。随着风电等新能源渗透率逐渐升高,电力系统中电力电子器件占比越来越大,若直驱风电机组不能提供足够的惯量、阻尼支撑,当电力系统面临重负载投切时,容易出现频率波动过大,甚至频率失稳的问题。为此,有学者提出一种不使用锁相环的构网型控制模式,构网型控制在直驱风电机组并网系统中可以为系统提供惯性和阻尼,改善系统的频率响应特性,提高系统稳定性。然而,构网型控制策略为进行频率支撑需要预留发电机组设备容量,导致直驱风电机组往往不能按照最大功率跟踪运行,造成弃风弃电的浪费现象。结合两种控制模式的优势,“a grid forming/followingsequence switching control strategy for supporting frequency stabilityofisolatedpower grids”文献提出了构网型控制与跟网型控制之间进行选择的依据,在频率波动开始阶段需要大惯量和大阻尼减小系统频率波动偏差,此时采用构网型控制策略;在频率恢复阶段需要减小系统惯量和阻尼以缩短恢复稳定时间,此时采用跟网型控制策略。然而,这种方法针对所有频率波动无差别进行选择,频繁的切换势必会造成机械磨损与能量损耗,另一方面也未对切换过程出现的通信延时进行补偿。
技术实现思路
1、本发明是为了解决上述现有技术存在的不足之处,提出一种直驱风电机组的跟网型控制到构网型控制的延时补偿切换方法,以期减小系统因频繁切换操作导致的机械磨损和能量损耗,同时解决信号传递带来的通信延时问题,进而改善直驱风电机组并网系统的功率输出能力和频率稳定性,使得直驱风电机组并网系统在微小负载投切工况下采用跟网型控制,从而具有较大的输出功率;在较大负载投切工况下采用构网型控制,减小系统频率的波动,改善系统频率稳定性。
2、本发明为达到上述发明目的,采用如下技术方案:
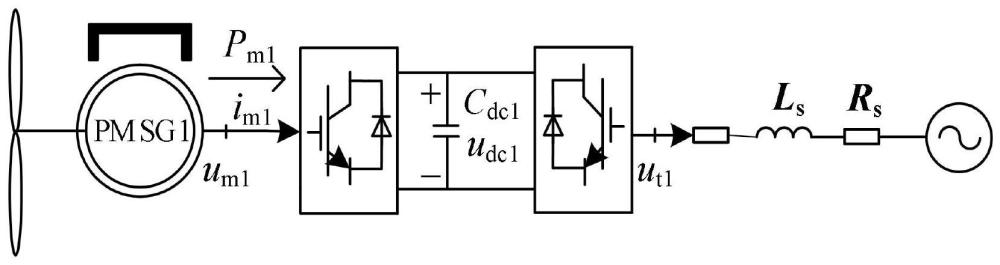
3、本发明一种直驱风电机组的跟网型控制到构网型控制的延时补偿切换方法,所述直驱风电机组包括:机侧换流器、网侧换流器的特点在于,所述延时补偿切换方法是按如下步骤进行:
4、步骤s1:建立直驱风电机组在跟网型控制下机侧换流器、网侧换流器的控制模型;
5、步骤s1.1:建立直驱风电机组在跟网型控制下的机侧换流器的控制模型:
6、步骤s1.1.1:在dq旋转坐标系下,利用式(1)建立直驱风电机组在跟网型控制下机侧换流器的转速外环控制结构:
7、
8、式(1)中,isqref1为直驱风电机组在跟网型控制下机侧的q轴电流参考值,ωmref为直驱风电机组在跟网型控制下的机侧转速给定值,ωm为直驱风电机组在跟网型控制下的机侧转速测量值,kp1为转速外环控制的比例系数,ki1为转速外环控制的积分系数,s表示积分;
9、步骤s1.1.2:在dq旋转坐标系下,利用式(2)和式(3)建立直驱风电机组在跟网型控制下机侧换流器的电流内环控制结构:
10、
11、
12、式(2)中,usq1为跟网型控制下机侧换流器的q轴电流控制环节输出的脉冲宽度调制模拟电压的q轴分量,isq1为跟网型控制下的机侧q轴电流测量值,kp2为跟网型控制下机侧换流器的电流内环控制的比例系数,ki2为跟网型控制下机侧换流器的电流内环控制的积分系数;
13、式(3)中,usd1为跟网型控制下机侧换流器的d轴电流控制环节输出的脉冲宽度调制模拟电压的d轴分量,isd1为直驱风电机组在跟网型控制下的机侧d轴电流测量值,kp3为跟网型控制下机侧换流器的电流内环控制的比例系数,ki3为跟网型控制下机侧换流器的电流内环控制的积分系数;
14、步骤s1.1.3:通过usd1和usq1生成跟网型控制下的机侧换流器的脉冲信号pwm1;
15、步骤s1.2:建立直驱风电机组在跟网型控制下的网侧换流器的控制模型:
16、步骤s1.2.1:在dq旋转坐标系下,利用式(4)建立直驱风电机组在跟网型控制下的网侧换流器的直流电压外环控制结构:
17、
18、式(4)中,udcref为直驱风电机组在跟网型控制下的直流电压给定值,udc为直驱风电机组在跟网型控制下的直流电压测量值,idref2为直驱风电机组在跟网型控制下的网侧d轴电流参考值,kp4为跟网型控制下的网侧换流器的直流电压外环控制的比例系数,ki4为跟网型控制下的网侧换流器的直流电压外环控制的积分系数;
19、步骤s1.2.2:在dq旋转坐标系下,利用式(5)和式(6)建立直驱风电机组在跟网型控制下的网侧换流器的电流内环控制结构:
20、
21、
22、式(5)中,id2为直驱风电机组在跟网型控制下的网侧d轴电流测量值,ugd为电网d轴电压测量值,ud2为跟网型控制下的网侧换流器的d轴电流控制环节输出的脉冲宽度调制模拟电压的d轴分量,kp5为跟网型控制下的网侧换流器的电流内环控制的比例系数,ki5为跟网型控制下的网侧换流器的电流内环控制的积分系数;
23、式(6)中,iqref2为直驱风电机组在跟网型控制下的网侧q轴电流参考值,iq2为直驱风电机组在跟网型控制下的网侧q轴电流测量值,ugq为电网q轴电压测量值,uq2为跟网型控制下的网侧换流器的q轴电流控制环节输出的脉冲宽度调制模拟电压的q轴分量,kp6为跟网型控制下的网侧换流器的电流内环控制的比例系数,ki6为跟网型控制下的网侧换流器的电流内环控制的积分系数;
24、步骤s1.2.3:通过ud2和uq2生成跟网型控制下的网侧换流器的脉冲信号pwm2;
25、步骤s2:建立直驱风电机组在构网型控制下机侧换流器、网侧换流器的控制模型;
26、步骤s2.1:建立直驱风电机组在构网型控制下机侧换流器的控制模型:
27、步骤s2.1.1:在dq旋转坐标系下,利用式(7)建立直驱风电机组在构网型控制下机侧换流器的直流电压外环控制结构:
28、
29、式(7)中,udref3为直驱风电机组在构网型控制下的直流电压给定值,ud3为直驱风电机组在构网型控制下的直流电压测量值,iqref3为直驱风电机组在构网型控制下的机侧q轴电流参考值,kp7为机侧换流器在构网型控制下的直流电压外环控制的比例系数,ki7为机侧换流器在构网型控制下的直流电压外环控制的积分系数;
30、步骤s2.1.2:在dq旋转坐标系下,利用式(8)和式(9)建立直驱风电机组在构网型控制下机侧换流器的电流内环控制结构:
31、
32、
33、式(8)中,uq3为构网型控制下机侧换流器的q轴电流控制环节输出的脉冲宽度调制模拟电压的q轴分量,iqref3为直驱风电机组在构网型控制下的机侧q轴电流参考值,iq3为直驱风电机组在构网型控制下的机侧q轴电流测量值,kp8为构网型控制下机侧换流器的q轴电流内环控制的比例系数,ki8为构网型控制下机侧换流器的q轴电流内环控制的积分系数;
34、式(9)中,ud3为构网型控制下机侧换流器的d轴电流内环控制环节输出的脉冲宽度调制模拟电压的d轴分量,id3为直驱风电机组在构网型控制下的机侧d轴电流测量值,kp9为构网型控制下机侧换流器的d轴电流内环控制的比例系数,ki9为构网型控制下机侧换流器的d轴电流内环控制的积分系数;
35、步骤s2.1.3:通过ud3和uq3生成构网型控制下的机侧换流器的脉冲信号pwm3;
36、步骤s2.2:建立直驱风电机组在构网型控制下的网侧换流器的控制模型;
37、步骤s2.2.1:在dq旋转坐标系下,利用式(10)和式(11)建立直驱风电机组在构网型控制下的网侧换流器的虚拟同步控制结构:
38、
39、(qeref-qe)=kp8(uref-u) (11)
40、式(10)中,pmg为直驱风电机组在构网型控制下的机械功率,pref为直驱风电机组在构网型控制下的机侧虚拟转子中的机械有功功率参考值,ωg为构网型控制下的虚拟同步机输出的角频率测量值,ωref为构网型控制下的虚拟同步机输出的角频率参考值,jg为直驱风电机组在构网型控制下的转子惯量系数,d表示微分,t为时间,dg为直驱风电机组在构网型控制下的阻尼系数;
41、式(11)中,qe为直驱风电机组在构网型控制下的网侧换流器输出的无功功率测量值,qeref为直驱风电机组在构网型控制下的网侧换流器输出的无功功率参考值,kp8为直驱风电机组在构网型控制下的网侧换流器控制的比例系数,uref为直驱风电机组在构网型控制下的网侧换流器输出电压的参考值,u为直驱风电机组在构网型控制下的网侧换流器输出电压的测量值;
42、步骤s2.2.2:通过ωg和u生成构网型控制下的网侧换流器的脉冲信号pwm4;
43、步骤s3:得到如式(14)所示的直驱风电机组在跟网型控制下的负载投切工况中电网的动态频率响应fh的表达式;
44、
45、式(14)中,tmf为直驱风电机组在跟网型控制下的机械转矩,tef为直驱风电机组在跟网型控制下的电磁转矩;ω0为电网的额定角速度;df为直驱风电机组在跟网型控制下的阻尼系数;jf为直驱风电机组在跟网型控制下的转子惯量系数,f0为电网稳态频率;
46、步骤s4:建立以电网频率信号为参考的跟网型控制到构网型控制的切换判断环节:
47、步骤s4.1:直驱风电机组在跟网型控制下初始运行,机侧换流器采用脉冲信号pwm1,网侧换流器采用脉冲信号pwm2;利用式(15)得到在负载投切工况下电网的频率变化量δf:
48、δf=|fh-f0| (15)
49、步骤s4.2:构建以电网频率信号为参考的跟网型控制到构网型控制的切换判断环节:
50、当δf<fs时,直驱风电机组在跟网型控制下的机侧换流器采用脉冲信号pwm1,网侧换流器采用脉冲信号pwm2;
51、当δf≥fs时,直驱风电机组在构网型控制下的机侧换流器采用脉冲信号pwm3,网侧换流器采用脉冲信号pwm4;其中,fs为电网最大允许频率偏差;
52、步骤s5:构建控制切换的延时补偿策略;
53、步骤s5.1:利用式(16)得到在电网动态频率为fs+f0时,直驱风电机组从跟网型控制切换到构网型控制所对应的t+时刻;以及在电网动态频率为f0-fs时,直驱风电机组从跟网型控制切换到构网型控制所对应的t-时刻:
54、
55、步骤s5.2:将电网的动态频率信号fh传递到直驱风电机组的延时记为δth;并设置在电网动态频率为fs+f0时,直驱风电机组从跟网型控制延时切换到构网型控制所对应的时刻为-δth+t+,在电网动态频率为f0-fs时,直驱风电机组从跟网型控制延时切换到构网型控制所对应的时刻为-δth+t-;
56、步骤s5.3:利用式(17)和式(18)得到考虑延时后的频率偏移上限fc+和下限fc-:
57、
58、
59、步骤s5.4:构建考虑延时补偿后,以电网频率信号为参考的跟网型控制到构网型控制的切换判断环节:
60、当fc-<fh<fc+时,直驱风电机组在跟网型控制下的机侧换流器采用脉冲信号pwm1,网侧换流器采用脉冲信号pwm2;
61、当fh>fc+或fh<fc-时,直驱风电机组在构网型控制下的机侧换流器采用脉冲信号pwm3,网侧换流器采用脉冲信号pwm4。
62、本发明所述的一种直驱风电机组的跟网型控制到构网型控制的延时补偿切换方法的特点也在于,按如下过程得到所述直驱风电机组在负载投切工况下电网的动态频率响应fh表达式:
63、步骤s3.1:利用式(12)建立直驱风电机组在跟网型控制下的负载投切工况中电网的频率响应关系:
64、
65、式(12)中,tmf为直驱风电机组在跟网型控制下的机械转矩,且tef为直驱风电机组在跟网型控制下的电磁转矩;且pmf为直驱风电机组在跟网型控制下的机械功率;pef为直驱风电机组在跟网型控制下的电磁功率;ω0为电网的额定角速度;df为直驱风电机组在跟网型控制下的阻尼系数;ωf为电网的瞬时角频率;jf为直驱风电机组在跟网型控制下的转子惯量系数;
66、步骤s3.2:求解式(12),获得如式(13)所示的直驱风电机组在跟网型控制下的负载投切工况中电网的瞬时角频率ωf的表达式:
67、
68、式(13)中,c为常数;
69、步骤s3.3:直驱风电机组在负载投切初始时刻,令电网角频率ωf=2πf0;其中,f0为电网稳态频率;则
70、步骤s3.4:将c的表达式代入式(13)得到直驱风电机组在负载投切工况下电网的动态频率响应fh的表达式。
71、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述延时补偿切换方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
72、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述延时补偿切换方法的步骤。
73、与现有技术相比,本发明的有益效果在于:
74、1.本发明通过提出直驱风电机组跟网型控制和构网型控制两种控制模式间的切换策略,使得并网系统可以根据负载投切情况灵活改变运行策略,即在小的负载投切下采用跟网型控制,保证了功率输出能力;在大的负载投切下采用构网型控制,为系统提供惯性与阻尼支撑,提高系统稳定性;所提切换策略同时考虑了直驱风电机组并网系统的功率输出能力和对电网的支撑能力,可以兼具跟网型控制功率输出能力大和构网型控制稳定性强的特点;
75、2.本发明通过推导跟网型直驱风电机组并网系统在负载投切工况下的动态频率响应表达式,明确了系统频率随时间变化的趋势及主导因素,提高了系统频率预测的准确性;
76、3.本发明考虑对通信延时进行补偿,得出了控制切换操作的电网动态频率信号和时刻,相比于未对通信延时进行补偿的情况,改善了直驱风电机组并网系统的频率响应特性。
- 还没有人留言评论。精彩留言会获得点赞!