一种应用于列车的多永磁同步牵引电机协同控制方法
本发明涉及模具,尤其涉及一种应用于列车的多永磁同步牵引电机协同控制方法。
背景技术:
1、在过去的几十年里,轨道交通迅速发展成为一种环保的交通技术。由于铁路的不断发展要求需要提高列车的性能,其中关键因素在于牵引电机,即列车的核心部件。近年来,永磁同步电机由于功率密度高、效率高、维护率低等多种优点,已成为下一代牵引电机的发展方向。
2、通常,列车运行要求所有车轮的线速必须一致。然而,使用永磁同步电机的主要缺点是每个牵引电机都需要一个单独的逆变器。由于各车厢的载荷变化和各车轮的磨损差异,各永磁同步电机的工作条件不尽相同。此外,由于永磁同步电机在转子之间没有任何机械连接,加大了车轮不同步的风险。以上因素都可能导致轮对的空转和打滑。因此,当采用永磁同步电机作为牵引电机时,采用合适的协同控制策略以确保最佳的同步性能至关重要。
技术实现思路
1、本发明的目的在于提供一种应用于列车的多永磁同步牵引电机协同控制方法,提升了永磁同步电机作为列车牵引电机时的包括跟踪性能和同步性能在内的协同性能。
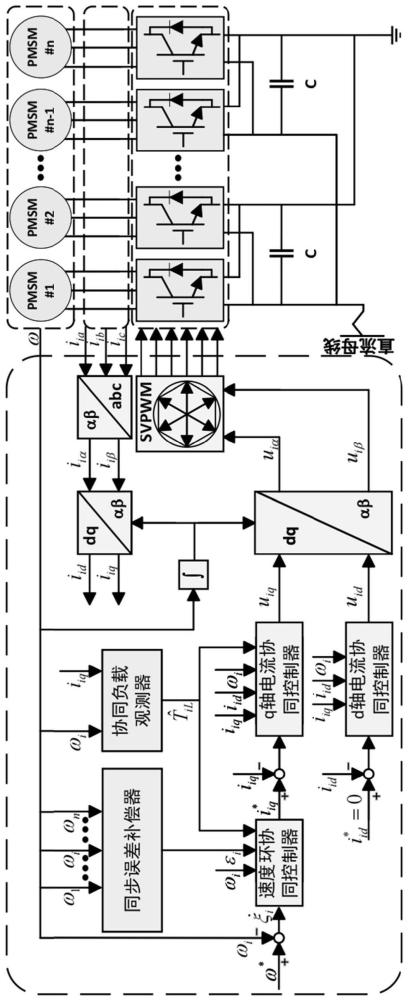
2、为实现上述目的,本发明提供如下技术方案:一种应用于列车的多永磁同步牵引电机协同控制方法,包括以下步骤:
3、步骤s1,建立多永磁同步牵引电机系统的数学模型;
4、步骤s2,基于协同控制理论建立观测器宏变量,通过协同负载转矩观测器对列车的永磁同步牵引电机负载转矩进行实时观测;
5、步骤s3,基于系统模型和协同控制理论,建立速度环宏变量,得到速度环协同控制器,控制各个电机的转速跟踪参考并保持较小的同步误差;
6、步骤s4,基于协同控制理论建立d轴电流环宏变量,根据预设的d轴参考电流得到d轴电流环协同控制器,控制各个电机的d轴电流为零;
7、步骤s5,基于协同控制理论建立q轴电流环宏变量,将速度环输出作为q轴参考电流得到q轴电流环协同控制器,控制各个电机的q轴电流快速达到参考值,从而使电机输出电磁转矩快速拖动负载;
8、步骤s6,构造整个系统的李亚普诺夫函数,验证整个多永磁同步电机闭环系统的稳定性。
9、优选的,所述多永磁同步牵引电机系统的数学模型为:
10、
11、式中,i为第i台永磁同步电机,i=1,…,n;n为电机总数;iid和iiq分别为第i台电机的d轴和q轴的电流;uid和uiq分别为第i台电机的d轴和q轴的电压;ωi和ωj分别为第i台和第j台电机的实际转速;为第i台电机的参考转速;rs为定子电阻;ls为定子电感;pn为电机极对数;ψf为永磁体磁链;ji和ji分别为第i台和第j台电机的转动惯量;bi为第i台电机的黏性阻尼系数;til为第i台电机的负载转矩;ξi和ηi分别为第i台电机的位置跟踪误差和位置同步误差。
12、优选的,s2中的观测器宏变量为:
13、
14、式中,tl为负载转矩;为负载转矩的估计值;k9和k10分别为正的观测器系数。
15、优选的,假设负载转矩在一个采样周期内不变,则有可以有效减少谐波含量。得到s2中的负载转矩观测器为:
16、
17、式中,t为与收敛速度有关的正时间参数;iq为q轴电流;b为黏性阻尼系数;ω为电机转速;j为电机转动惯量。
18、优选的,s3中的速度环宏变量为跟踪误差和同步误差的组合:
19、
20、其中,ki1、ki2、ki3、ki4分别表示正的速度控制器系数。
21、优选的,s3中,所述速度环协同控制器包括速度跟踪误差、位置跟踪误差、速度同步误差和位置同步误差,输出值作为q轴电流参考:
22、
23、式中,t1为与收敛速度有关的正时间参数;til为第i台电机的负载转矩,在计算时用s2中的替代,中的i为第i台电机。
24、优选的,s4中的d轴电流环宏变量为实际电流与参考电流误差的组合:
25、
26、式中,ki5、ki6分别为正的d轴电流控制器系数,为0。
27、优选的,s4中,d轴电流环协同控制器的输出值作为d轴电压:
28、
29、式中,t2为与收敛速度有关的正时间参数;ki5、ki6分别为正的d轴电流控制器系数。
30、优选的,s5中,q轴电流宏变量为:
31、
32、式中,ki7、ki8分别为正的q轴电流控制器系数。
33、优选的,s5中,q轴电流环协同控制器的输出值为q轴电压:
34、
35、式中,t3为与收敛速度有关的正时间参数。
36、优选的,s6中所述总系统的李雅普诺夫函数为:
37、
38、其中,ψij为第i台电机的第j个宏变量。根据系统模型和控制器计算李雅普诺夫函数vi的一阶导函数,有验证了该多永磁同步电机闭环系统渐近稳定。
39、与现有技术相比较,本发明具有如下有益效果:
40、本发明实现了永磁同步电机负载转矩的快速准确观测,并将观测值给到控制器,增强了系统的抗负载扰动性能。
41、本发明建立了多永磁同步电机间的算法级联系,极大地增强了多电机间的协同性能,系统的同步误差和跟踪误差明显减少。
42、本发明通过电流环协同控制器在不增加谐波的前提下,使得电机输出电磁转矩快速拖动负载。
技术特征:
1.一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,所述多永磁同步牵引电机系统的数学模型为:
3.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s2中的观测器宏变量为:
4.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s2中的负载转矩观测器为:
5.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s3中的速度环宏变量为:
6.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s3中,所述速度环协同控制器包括速度跟踪误差、位置跟踪误差、速度同步误差和位置同步误差,输出值作为q轴电流参考:
7.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s4中的d轴电流环宏变量为:
8.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s4中,d轴电流环协同控制器的输出值作为d轴电压:
9.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s5中,q轴电流宏变量为:
10.根据权利要求1所述的一种应用于列车的多永磁同步牵引电机协同控制方法,其特征在于,s5中,q轴电流环协同控制器的输出值作为q轴电压:
技术总结
本发明公开了一种应用于列车的多永磁同步牵引电机协同控制方法,涉及轨道列车控制技术领域,包括以下步骤:S1,建立多永磁同步牵引电机系统的数学模型;S2,建立观测器宏变量,通过协同负载转矩观测器对列车的永磁同步牵引电机负载转矩进行实时观测;S3,设计速度环协同控制器,控制各个电机的转速跟踪参考并保持较小的同步误差;S4,设计d轴电流环协同控制器,控制各个电机的d轴电流为零;S5,设计q轴电流环协同控制器,控制各个电机的q轴电流快速达到参考值;S6,验证系统稳定性。本发明建立了多个永磁同步电机间算法级的联系,既保证了电机输出的电磁转矩能够快速拖动负载,又有效降低了多电机系统的跟踪误差和同步误差。
技术研发人员:黄德青,赵麒源,董海荣,王青元,秦娜
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!