一种基于椭圆模型的压电驱动系统动态响应控制方法
本发明属于微机电系统控制领域,具体涉及一种基于椭圆模型的压电驱动系统动态响应控制方法。
背景技术:
1、压电驱动系统是由压电陶瓷(pzt)驱动的微定位扫描系统,由于其高刚度、紧凑尺寸、高分辨率等优点,已被广泛应用于各种精密工程领域中,例如纳米定位系统、扫描探针显微镜、精密光学系统、转子系统等。
2、然而,由于pzt固有的迟滞特性以及系统自身的带宽限制,压电驱动系统在高频扫描时会同时表现出响应非线性和振动,从而降低系统定位精度。对于压电驱动系统的动态运动控制,目前常用的方法包括前馈控制和反馈控制。前馈控制的实现通常是产生一个修正的控制输入,该输入通过pzt的逆迟滞模型作为前馈控制器获得,但是前馈控制器的控制精度依赖于pzt的建模精度。反馈控制通常是利用位移信号作为反馈量来构建闭环系统,可以有效降低系统响应的非线性和振动,但这种方法往往需要体积庞大、价格昂贵的传感器和复杂的控制电路。因此,如何简单、有效地同时抑制压电驱动系统的动态响应非线性和振动需要进一步研究与解决。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种基于椭圆模型的压电驱动系统动态响应控制方法。
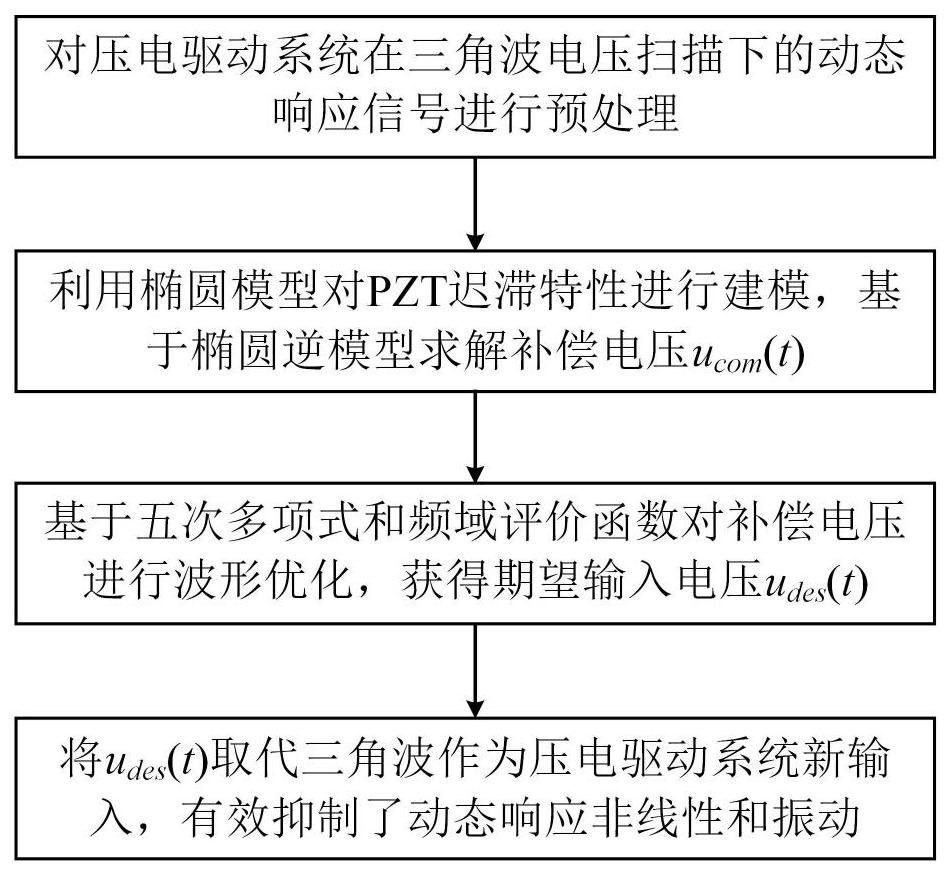
2、本发明提供了一种基于椭圆模型的压电驱动系统动态响应控制方法,用于抑制压电驱动系统在高频扫描时的非线性和振动,具有这样的特征,包括以下步骤:步骤s1,对压电驱动系统在三角波电压信号扫描下的动态位移响应信号进行预处理,构建得到压电陶瓷的电压-位移迟滞曲线;
3、步骤s2,采用椭圆模型对电压-位移迟滞曲线进行建模,并基于椭圆逆模型求解压电陶瓷的补偿电压ucom(t);
4、步骤s3,采用多项式函数以及建立频域评价函数对补偿电压ucom(t)进行波形优化,得到最优输入轨迹的期望输入电压udes(t);
5、步骤s4,将最优输入轨迹的期望输入电压udes(t)取代三角波作为压电驱动系统的新输入,完成压电驱动系统的动态响应控制。
6、在本发明提供的基于椭圆模型的压电驱动系统动态响应控制方法中,还可以具有这样的特征:其中,步骤s1中包括以下子步骤:
7、步骤s1-1,搭建压电驱动系统的动态响应测试平台,通过信号发生器和压电陶瓷控制器将具有不同频率的三角波电压输入到压电驱动系统中,由电容位移传感器测得系统的位移响应,通过数据采集系统将位移响应传输到上位机进行数据分析;
8、步骤s1-2,根据三角波电压信号和位移响应信号构建压电陶瓷的电压-位移迟滞曲线,表征出压电陶瓷的率相关迟滞非线性特征;
9、步骤s1-3,对压电驱动系统的振动位移响应进行傅里叶变换得到位移频谱,并通过谐波分析得到压电驱动系统的一阶固有频率。
10、在本发明提供的基于椭圆模型的压电驱动系统动态响应控制方法中,还可以具有这样的特征:其中,步骤s2中包括以下子步骤:
11、步骤s2-1,对压电陶瓷的电压-位移迟滞曲线进行椭圆建模,设定电压-位移迟滞曲线的一个点落在一个椭圆上,得到椭圆模型的公式如下:
12、
13、
14、公式(1)和公式(2)中,xc为椭圆的中心坐标,c(θ)为椭圆旋转角θ的系数矩阵,r为椭圆长短轴矩阵,a和b分别为长轴和短轴的长度,为角度变量的参数矩阵,椭圆模型由五个待定参数uc,dc,θ,a和b进行唯一确定;
15、步骤s2-2,基于椭圆模型得到压电陶瓷的输入电压u(t)与输出位移d(t)之间的一一映射关系,正反映射关系由两个解析函数表示,公式如下:
16、
17、
18、公式(3)和公式(4)中,h[u](t)表示从u(t)到d(t)的正映射,p1、p2、p3为正映射系数,h-1[d](t)表示从d(t)到u(t)的逆映射,p′1、p′2、p′3为逆映射系数,计算公式分别如下:
19、
20、
21、正映射系数p1、p2、p3和逆映射系数p′1、p′2、p′3中,f0为三角波的扫描频率,ua、da、αu、αd的计算公式如下:
22、步骤s2-3,基于椭圆模型对压电陶瓷的电压-位移迟滞曲线进行最小二乘拟合,并且在拟合前首先对电压-位移迟滞曲线的电压和位移数据进行归一化处理,然后进行数据重采样,最后使用matlab软件计算得到椭圆模型的五个待定参数后,将期望的具有线性特征的位移代入到逆映射h-1[d](t)中,求解得到压电陶瓷的补偿电压ucom(t)。
23、在本发明提供的基于椭圆模型的压电驱动系统动态响应控制方法中,还可以具有这样的特征:其中,步骤s3中包括以下子步骤:
24、步骤s3-1,采用多项式函数对补偿电压ucom(t)拐点部分的电压波形进行描述,用光滑曲线代替信号尖峰,进行波形优化,得到期望输入电压udes(t),完整周期的期望输入电压udes(t)的信号波形分为非线性部分与拐点部分,非线性部分的波形根据补偿电压ucom(t)得到,拐点部分的波形由两个多项式曲线fabc(t)和fdef(t)确定,设定拐点部分对应时间占整周期时间t的比例为r,得到公式如下:
25、tabc+tdef=r·t (5)
26、公式(5)中,tabc=tdef,表示fabc(t)和fdef(t)的时间尺度,采用五次多项式得到fabc(t)和fdef(t)的计算公式如下:
27、
28、公式(6)中,x=[x5x4x3x2x1 x0]和y=[y5y4y3y2y1y0]分别为fabc(t)和fdef(t)的系数向量,t=[t5 t4 t3 t2 t 1]t表示时间向量,ta、tc、td、tf表示fabc(t)和fdef(t)与补偿电压ucom(t)连接点处的时间,通过施加位置约束和速度约束求解出满足所有约束条件的参数,确定fabc(t)和fdef(t)的波形,得到完整周期的期望输入电压udes(t)的公式如下:
29、
30、步骤s3-2,采用傅里叶展开将期望输入电压udes(t)表达为:
31、
32、公式(7)中,为udes(t)的第k阶复振幅,建立频域评价函数ξ如下:
33、
34、当ξ取得最小值,期望输入电压udes(t)的高阶谐波分量最小,得到最优输入轨迹的期望输入电压udes(t)。
35、发明的作用与效果
36、根据本发明所涉及的基于椭圆模型的压电驱动系统动态响应控制方法,无需知道压电驱动系统的传递函数模型,只需根据压电驱动系统的输入信号和输出响应就能进行输入信号的优化,实现系统控制,并且本发明的方法属于开环控制策略,具有简单、有效、鲁棒性好的优点,通过本发明的方法可以同时有效抑制压电驱动系统在高频扫描时的非线性和振动,满足压电微定位、微操作系统对运动高精度和高跟踪性能的要求,有效提高了工作效率,同时容易适用于现有的pzt驱动装置,为压电驱动系统控制提供了一种新技术。
- 还没有人留言评论。精彩留言会获得点赞!