电机转子角度确定方法、装置、计算机设备和存储介质与流程
本技术涉及电机控制,特别是涉及一种电机转子角度确定方法、装置、计算机设备和存储介质。
背景技术:
1、随着电机控制技术的发展,角度传感器逐渐被应用到电机上以检测电机运行时的转子角度。针对电机的角度传感器可以包括多极对数的正余弦磁编码器或者旋转变压器。
2、由于在安装角度传感器的过程中,大概率会存在机械安装偏差,那么通过角度传感器输出的角度信号中也相应会存在因机械安装偏差导致的信号偏差。故而,目前由角度传感器检测到的电机转子角度的准确性低,电机控制效果差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种电机转子角度确定方法、装置、计算机设备和存储介质,以有效减弱或消除角度信号中的信号偏差对电机转子角度计算的准确度性的影响。
2、第一方面,本技术提供了一种电机转子角度确定方法。方法包括:
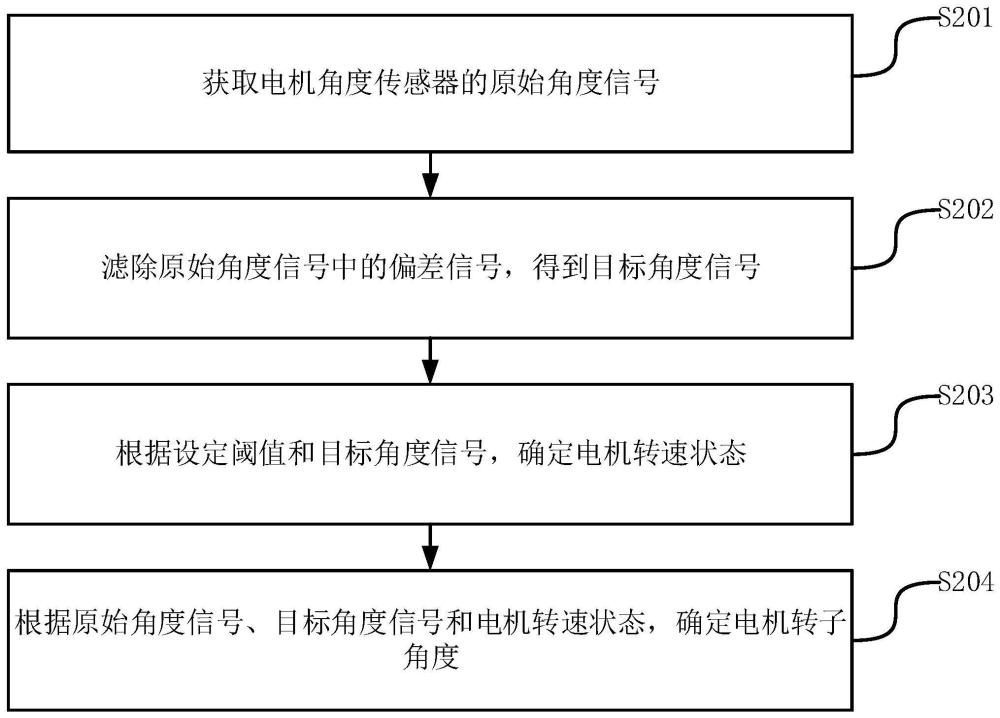
3、获取电机角度传感器的原始角度信号;
4、滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差;
5、根据设定阈值和目标角度信号,确定电机转速状态;
6、根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。
7、在其中一个实施例中,原始角度信号为正余弦类型的信号,滤除原始角度信号中的偏差信号,得到目标角度信号,包括:
8、对原始角度信号进行微分处理,以滤除原始角度信号中的偏差信号,得到目标角度信号。
9、在其中一个实施例中,设定阈值包括第一设定阈值和第二设定阈值,第二设定阈值大于第一设定阈值;根据设定阈值和目标角度信号,确定电机转速状态,包括:
10、确定目标角度信号的信号强度;
11、若信号强度小于第一设定阈值,则确定电机转速状态为第一转速状态;
12、若信号强度不小于第一设定阈值,且信号强度小于第二设定阈值,则确定电机转速状态为第二转速状态;
13、若信号强度不小于第二设定阈值,则确定电机转速状态为第三转速状态;
14、其中,电机处于第二转速状态下的转速,大于电机处于第一转速状态下的转速;电机处于第三转速状态下的转速,大于电机处于第二转速状态下的转速。
15、在其中一个实施例中,根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度,包括:
16、根据原始角度信号,确定第一转子角度;
17、根据目标角度信号,确定第二转子角度;
18、根据电机转速状态,确定角度调整系数;
19、根据角度调整系数、第一转子角度和第二转子角度,确定电机转子角度。
20、在其中一个实施例中,角度调整系数包括第一角度调整系数和第二角度调整系数,且第一角度调整系数和第二角度调整系数之和等于1;
21、根据角度调整系数、第一转子角度和第二转子角度,确定电机转子角度,包括:
22、采用第一角度调整系数,对第一转子角度进行加权,得到第一加权角度;
23、采用第二角度调整系数,对第二转子角度进行加权,得到第二加权角度;
24、将第一加权角度和第二加权角度之和,作为电机转子角度。
25、在其中一个实施例中,根据电机转速状态,确定角度调整系数,包括:
26、若电机转速状态为第一转速状态,则将第一角度调整系数配置为0,以及将第二角度调整系数配置为1;
27、若电机转速状态为第二转速状态,则根据设定阈值和信号强度,确定第一角度调整系数和第二角度调整系数;
28、若电机转速状态为第三转速状态,则将第一角度调整系数配置为1,以及将第二角度调整系数配置为0。
29、在其中一个实施例中,根据设定阈值和信号强度,确定第一角度调整系数和第二角度调整系数,包括:
30、确定信号强度与第二设定阈值之间的第一差值,以及第一设定阈值与第二设定阈值之间的第二差值;
31、将第一差值与第二差值之间的比值,作为第一角度调整系数;
32、将1与第一角度调整系数之差,作为第二角度调整系数。
33、第二方面,本技术还提供了一种电机转子角度确定装置。装置包括:
34、获取模块,用于获取电机角度传感器的原始角度信号;
35、滤除模块,用于滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差;
36、转速状态确定模块,用于根据设定阈值和目标角度信号,确定电机转速状态;
37、转子角度确定模块,用于根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。
38、第三方面,本技术还提供了一种计算机设备。计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现以下步骤:
39、获取电机角度传感器的原始角度信号;
40、滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差;
41、根据设定阈值和目标角度信号,确定电机转速状态;
42、根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。
43、第四方面,本技术还提供了一种计算机可读存储介质。计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
44、获取电机角度传感器的原始角度信号;
45、滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差;
46、根据设定阈值和目标角度信号,确定电机转速状态;
47、根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。
48、第五方面,本技术还提供了一种计算机程序产品。计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
49、获取电机角度传感器的原始角度信号;
50、滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差;
51、根据设定阈值和目标角度信号,确定电机转速状态;
52、根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。
53、上述电机转子角度确定方法中,通过获取电机角度传感器的原始角度信号,并滤除原始角度信号中的偏差信号,得到目标角度信号;其中,偏差信号包括电机角度传感器的器件固有偏差和器件安装偏差。根据设定阈值和目标角度信号,确定电机转速状态。根据原始角度信号、目标角度信号和电机转速状态,确定电机转子角度。相较于传统的仅依靠原始角度信号,确定电机转子角度的方式,本技术在原始角度信号的基础上,还对原始角度信号滤除了偏差信号,并结合滤除处理后的目标角度信号,确定电机转速状态,最后结合电机转速状态,以及原始角度信号和目标角度信号,最终更加准确的确定电机转子角度,也就是说,本技术在确定电机转子角度时,不仅考虑了原始角度信号,还考虑了电机转速状态和目标角度信号,有效提高了电机转子角度的准确性。
- 还没有人留言评论。精彩留言会获得点赞!