一种可以自动识别初始位置的结构和方法与流程
本发明涉及医疗器械,具体涉及一种可以自动识别初始位置的结构和方法。
背景技术:
1、对于运动过程需要控制的医疗器械,运动件在使用后或不规范操作有异常时以及运输过程中,可能导致其位置偏移,使其后续无法正常使用,因此器械异常复位或初次使用通电后需要检测运动件是否在预设位置,以便控制运动件到达期望的位置,因此电动医疗器械组装时就要限定运动件的位置,或是组装好以后寻找运动件的位置。
2、寻找运动件位置的方法,目前采用的是在运动件的移动路径上安装位置传感器来检测运动件是否达到检测的位置,以此来确定运动件的位置,这对安装空间要求高,需要预留传感器位置,同时需要做线路排布,会增大对器械的空间需求。
3、基于此,本发明设计了一种可以自动识别初始位置的结构和方法以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种可以自动识别初始位置的结构和方法。
2、为实现以上目的,本发明通过以下技术方案予以实现:
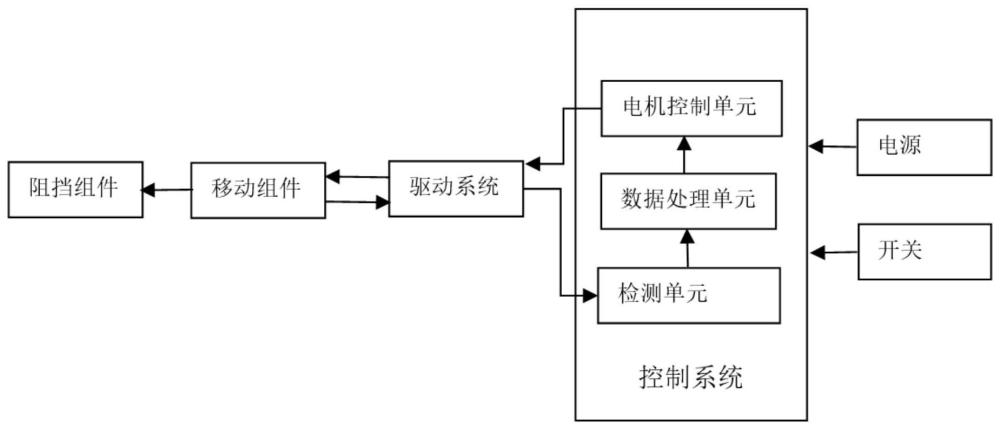
3、一种可以自动识别初始位置的结构,包括电源、控制系统、驱动系统、移动组件和阻挡组件,电源、驱动系统均与控制系统连接,驱动系统与移动组件连接;
4、电源,用于给驱动系统和控制系统提供电力;
5、驱动系统,用于带动移动组件运动;
6、阻挡组件设置在移动组件运行路线上;
7、控制系统,包括检测单元、数据处理单元和电机控制单元;
8、检测单元,用于检测驱动系统的负载参数或电源的表征参数,并将负载参数或表征参数传输至数据处理单元;
9、数据处理单元,用于对驱动系统的负载参数预设阈值,并判断检测单元传输的参数是否达到预设阈值;或者将电源的表征参数对时间进行二阶求导或高阶求导并取绝对值,数据处理单元预设阈值,判断所述绝对值是否达到预设阈值;
10、若达到,则电机控制单元控制驱动系统改变运动状态。
11、更进一步的,所述驱动系统的负载参数为电流值、压力值或扭矩值;电源的表征参数为电流值、电压值、温度值或容量变化量。
12、更进一步的,若负载参数或者绝对值达到预设阈值,则控制系统控制驱动系统停止或者反转固定的圈数;数据处理单元的输出端与电机控制单元的输入端电连接;还包括开关,控制系统与电源、开关电连接。
13、更进一步的,控制系统采用plc控制器。
14、更进一步的,检测单元采用电流检测传感器,电流检测传感器的输出端与数据处理单元的输入端电连接。
15、更进一步的,驱动系统采用电机,电机的输入端与电机控制单元电连接,电机与电流检测传感器的检测端电连接,所述移动组件与电机的输出轴固定连接。
16、一种可以自动识别初始位置的方法,包括以下步骤:
17、步骤一、电源给驱动系统和控制系统提供电力;
18、步骤二、驱动系统带动移动组件运动;
19、步骤三、移动组件移动至阻挡组件接触;
20、步骤四、阻挡组件阻挡移动组件的移动;检测单元检测驱动系统的负载参数或电源的表征参数,并将负载参数或表征参数传输至数据处理单元;
21、步骤五、数据处理单元预设阈值,并判断检测单元传输的负载参数是否达到预设阈值,或判断电源的表征参数对时间进行二阶求导或高阶求导的绝对值是否达到预设阈值;若达到预设阈值,则控制系统控制改变所述驱动系统的运动状态。
22、有益效果
23、本发明通过电源给驱动系统和控制系统提供电力;通过驱动系统带动移动组件运动;通过移动组件移动至阻挡组件接触;通过阻挡组件阻挡移动组件的移动,增加移动组件运动的负载;通过检测单元检测驱动系统的负载参数或电源的表征参数,并将负载参数或表征参数传输至数据处理单元;通过数据处理单元预设阈值,并判断检测单元传输的负载参数,或表征参数对时间进行二阶求导或高阶求导的绝对值是否达到预设阈值,若达到预设阈值,则控制系统控制驱动系统停止或者反转固定的圈数。
24、本发明通过电源给电机、控制系统、数据处理单元、检测单元和开关提供电力;通过电机带动推进丝杆转动,推进丝杆带动推进丝筒向下移动;在推进丝筒碰到阻挡结构前,运动过程中没有额外负载,电机工作电流小,当推进丝筒碰到阻挡结构后,推进丝筒无法继续移动,电机工作电流极速增大,当电流检测传感器识别到电流大幅度增大后将数据传输给数据处理单元,经数据处理单元处理后的信息传输给控制系统,控制系统获得信号并控制电机停转或反转固定的圈数,保持推进丝筒在当前位置停下,如此便识别到了推进丝筒到达了初始位置,通过电机运行时的电流变化,来判断推进丝筒是否达到检测位置,无需预留传感器位置,降低了安装空间和线路排布要求,可以大大缩小所需空间。
技术特征:
1.一种可以自动识别初始位置的结构,其特征在于:包括电源、控制系统、驱动系统、移动组件和阻挡组件,电源、驱动系统均与控制系统连接,驱动系统与移动组件连接;
2.根据权利要求1所述的可以自动识别初始位置的结构,其特征在于,所述驱动系统的负载参数为电流值、压力值或扭矩值;电源的表征参数为电流值、电压值、温度值或容量变化量。
3.根据权利要求2所述的可以自动识别初始位置的结构,其特征在于,若负载参数或者绝对值达到预设阈值,则控制系统控制驱动系统停止或者反转固定的圈数;数据处理单元的输出端与电机控制单元的输入端电连接;还包括开关,控制系统与电源、开关电连接。
4.根据权利要求3所述的可以自动识别初始位置的结构,其特征在于,控制系统采用plc控制器。
5.根据权利要求4所述的可以自动识别初始位置的结构,其特征在于,检测单元采用电流检测传感器,电流检测传感器的输出端与数据处理单元的输入端电连接。
6.根据权利要求5所述的可以自动识别初始位置的结构,其特征在于,驱动系统采用电机,电机的输入端与电机控制单元电连接,电机与电流检测传感器的检测端电连接,所述移动组件与电机的输出轴固定连接。
7.一种可以自动识别初始位置的方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种可以自动识别初始位置的结构和方法,属于医疗器械技术领域,包括电源、控制系统、驱动系统、移动组件和阻挡组件,电源、驱动系统均与控制系统连接,驱动系统与移动组件连接;数据处理单元,用于对驱动系统的负载参数预设阈值,或者对电源的表征参数预设阈值,判断是否达到预设阈值;若达到,则电机控制单元控制驱动系统改变运动状态。本发明可判断推进丝筒是否达到检测位置,无需预留传感器位置,降低了安装空间和线路排布要求,可以大大缩小所需空间。
技术研发人员:马建民,杜祥金,沈帅
受保护的技术使用者:江苏以瑞医疗科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!