一种基于BFOA的PMSM预测控制系统参数补偿方法
本发明涉及电机控制领域,尤其是一种基于bfoa的pmsm预测控制系统参数补偿方法。
背景技术:
1、由于永磁同步电机(permanent magnet synchronous motor,pmsm)是一个复杂的非线性、强耦合、多变量系统,其控制难度高、成本大。近年来,预测控制、滑模控制、智能控制等多种先进的控制策略被提出并运用到pmsm控制系统中。其中,有限控制集模型预测电流控制(finite control set model predictive current control,fcs-mpcc)因其对模型要求低、控制综合质量好、在线计算方便等特点脱颖而出。但fcs-mpcc在实际应用中仍存在明显的缺点:pmsm物理结构存在齿槽效应、边端效应和饱和效应,在运行过程中会出现温升参数变化,而预测结果依赖于系统模型参数,参数失配会导致控制性能下降。针对这一问题,主要的解决方法可归纳为两种:一种即在线参数识别,另一种为预测误差补偿方法。参数识别需要精确的电压和电流测量,在实际实施中较为复杂。预测误差补偿方法通过设计观测器、调节器等去校正预测模型的参数,但补偿限于单项参数:d、q轴电感或磁体磁链,无法同时对多个参数进行补偿,且有时会削弱系统动态响应。因此,为进一步提升pmsm的发展和应用,pmsm预测控制系统参数鲁棒性的研究已成为当前热点。
技术实现思路
1、本发明人针对上述问题及技术需求,提出了一种基于bfoa的pmsm预测控制系统参数补偿方法,来维持电机在各类参数畸变情况下控制性能的稳定性,克服传统参数补偿策略难以实现参数全覆盖、计算量大的问题。本发明的技术方案如下:
2、一种基于bfoa的pmsm预测控制系统参数补偿方法,包括如下步骤:
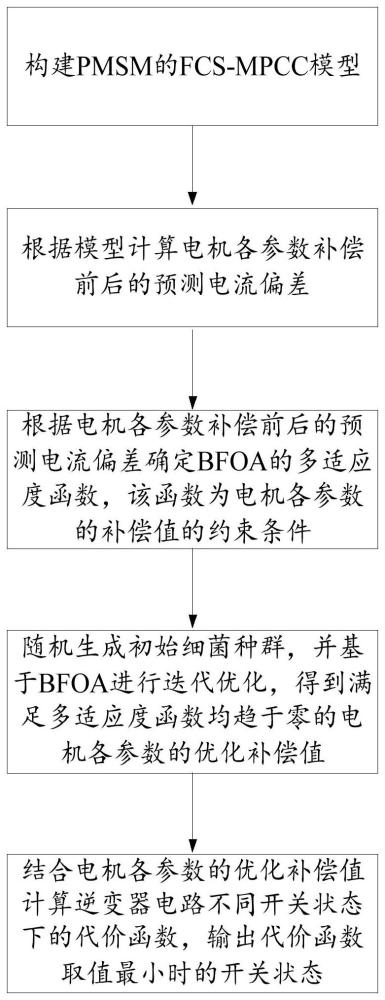
3、构建pmsm的fcs-mpcc模型,并根据模型计算电机各参数补偿前后的预测电流偏差;其中,电机参数包括定子电阻、dq轴电感、永磁体磁链;
4、根据电机各参数补偿前后的预测电流偏差确定bfoa的多适应度函数,多适应度函数为电机各参数的补偿值的约束条件;
5、随机生成初始细菌种群,并基于bfoa进行迭代优化,得到满足多适应度函数均趋于零的电机各参数的优化补偿值;其中迭代优化的参数为每个细菌的位置信息,包含了电机各参数的补偿值组成的四维向量;
6、结合电机各参数的优化补偿值计算逆变器电路不同开关状态下的代价函数,输出代价函数取值最小时的开关状态。
7、其进一步的技术方案为,fcs-mpcc模型为:
8、
9、式中,id(k)、iq(k)表示当前采样时刻k的d、q轴电流;id(k+1)、iq(k+1)表示下一采样时刻k+1的d、q轴预测电流值,ud(k)、uq(k)表示当前采样时刻k的d、q轴电压;t为预测控制系统的采样时长;ld、lq分别为d、q轴电感;rs为定子电阻;ωe为转子电角速度;ψf为永磁体磁链。
10、其进一步的技术方案为,根据模型计算电机各参数补偿前后的预测电流偏差,表达式为:
11、
12、
13、式中,表示下一采样时刻k+1、电机各参数补偿后的d、q轴预测电流值,表示下一采样时刻k+1、电机各参数补偿前发生畸变时的d、q轴预测电流值,id(k)、iq(k)表示当前采样时刻k的d、q轴电流,ud(k)、uq(k)表示当前采样时刻k的d、q轴电压;为d轴电流偏差分量,为q轴电流偏差分量;t为预测控制系统的采样时长;ldm、lqm分别为d、q轴电感标定值;rsm是定子电阻标定值;ωe为转子电角速度;ψfm为永磁体磁链标定值;δr、δld、δlq、δψ为电机各参数的畸变值,δl'd、δl'q、δr'、δψ'为电机各参数的补偿值。
14、其进一步的技术方案为,根据电机各参数补偿前后的预测电流偏差确定bfoa的多适应度函数,包括:
15、将电机各参数补偿前后的预测电流偏差与未补偿时模型理论和实际的预测电流偏差进行对比,为缩小预测电流偏差从而令取值趋于零,部分项趋于零,得到bfoa的多适应度函数,分别记作j1、j2、j3、j4,表达式为:
16、
17、其进一步的技术方案为,初始细菌种群基于bfoa进行迭代优化,包括:
18、初始化bfoa各参数,包括种群个数、游动步数、趋化次数、繁殖次数、迁移概率和分散次数;
19、所有细菌进入趋化阶段,并根据多适应度函数值选择游动或翻滚,在达到趋化次数后所有细菌进入繁殖阶段;
20、在繁殖阶段,根据多适应度函数值选取趋化运动更合理的细菌进行自我复制,并淘汰其余细菌,在达到繁殖次数后所有细菌进入分散阶段;
21、在分散阶段,所有细菌以迁移概率执行分散动作,在达到分散次数后将输出的第一个细菌的位置信息作为电机各参数的优化补偿值。
22、其进一步的技术方案为,根据多适应度函数值选择游动或翻滚,包括:
23、当细菌个体i完成一次趋化动作后更新其位置信息,并计算其多适应度函数值;
24、若细菌个体i在第j+1次趋化后的每个适应度函数值均小于细菌个体i在第j次趋化后的相应适应度函数值,则细菌个体i沿当前方向游动,直到达到游动步数;否则,细菌个体i沿随机方向进行翻滚,并重新执行当细菌个体i完成一次趋化动作后更新其位置信息的步骤。
25、其进一步的技术方案为,根据多适应度函数值选取趋化运动更合理的细菌进行自我复制,包括:
26、计算每个细菌个体所处位置对应的多适应度函数值,将属于同一个适应度函数的计算值进行排序,并选取有一半以上计算值均趋于零的预定数量的细菌个体进行自我复制。
27、其进一步的技术方案为,所有细菌以迁移概率执行分散动作,包括:
28、当某个细菌个体满足发生迁移的概率,则该细菌个体消失的同时在空间任意位置随机生成一个新的细菌个体,且新旧细菌个体具有不同的位置信息。
29、其进一步的技术方案为,结合电机各参数的优化补偿值计算逆变器电路不同开关状态下的代价函数,包括:
30、计算逆变器电路不同开关状态z下的d、q轴电压,z=(1,2,3,4,5,6,7,8);
31、将电机各参数的优化补偿值和d、q轴电压输入至模型中,得到不同开关状态下的电机各参数补偿后的预测电流值,记为
32、基于电机各参数补偿后的预测电流值与d、q轴参考电流值之间的差值计算代价函数,表达式为:
33、
34、本发明的有益技术效果是:
35、本方法实现了群智能优化算法与电机参数补偿的结合,可对定子电阻、d电感、q轴电感、永磁体磁链在内的四种参数实现优化补偿,其中群智能优化算法优选细菌觅食优化算法(bacterial foraging optimization algorithm,bfoa);其次,根据fcs-mpcc模型生成电机参数补偿值的约束条件,作为bfoa的多适应度函数,有效提高了pmsm预测控制系统的鲁棒性,提升pmsm在高温等复杂环境中的控制性能;此外,此方法可实现对预测模型补偿参数的实时优化,pmsm调速系统的动、静态响应更为快速、稳定。
36、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!