一种并联直流微电网的固定时间分布式功率分配控制方法
本发明涉及并联直流微电协同控制,尤其是涉及一种并联直流微电网的固定时间分布式功率分配控制方法。
背景技术:
1、科学有效的能源管理和协同控制技术是提高太阳能无人机航行时长的重要因素。能源管理在长时间尺度上考量光伏产能、储能以及负荷需求三者的供需关系,可通过优化方法给出最优的调度方案以提高系统的能效。这个调度方案能够给出当下各能源节点的出力系数(能源节点输出功率的比例),在短时间尺度上,分布式协同控制就是实现能源节点间成比例功率输出和电压调节的手段。
2、目前,一方面,基于二次控制框架的分布式协同控制方法在初级控制层采用下垂控制;为了避免下垂控制导致的电压偏差,在二级控制层引入通信,构建分布式协同控制器来调整电压偏差和提高功率分配性能。虽然二次控制框架能够实现电压调节和比例功率分配,但是控制结构相对复杂,同时,传统的基于线性误差反馈调节的二次控制框架需要在良好的动态响应和较小的稳态误差上权衡。尽管在提高系统动态响应性能方面,已有一些有限时间的控制方法,但是结果给出的收敛时间依赖于初始条件。
3、另一方面,二级控制层设计分布式协同控制器需要获得邻居的状态信息,现有方法通常同时将电压和电流信息进行交互,以保证电压调节和比例功率分配。然而,通信总线传递数据信息是有限的,对于太阳能无人机来说,通信资源是极为珍贵的资源,更期望将其留给其他记载设备的功能性任务,因而降低通信负担十分必要。
技术实现思路
1、本发明的目的是提供一种并联直流微电网的固定时间分布式功率分配控制方法,该方法适用于并联直流微电网系统的硬件控制,以少量的数据状态传输、单层控制架构体系,即可实现微电网的分布式协同控制,在负载切换、能源节点切入切出、通信链路变化等工况下具有良好的适应性和弹性恢复能力,实现总线电压调节和能源节点间成比例功率输出的控制目标。
2、为实现上述目的,本发明提供了一种并联直流微电网的固定时间分布式功率分配控制方法,包括以下步骤:
3、s1、构建并联直流微电网误差动态模型;
4、s2、根据步骤s1得到的并联直流微电网误差动态模型,构建非线性电压误差动态观测器的建立;
5、s3、根据步骤s1得到的并联直流微电网误差动态模型和步骤s2得到的非线性电压误差动态观测器设计固定时间分布式协同控制器。
6、优选的,步骤s1中,构建并联直流微电网误差动态模型,包括以下步骤:
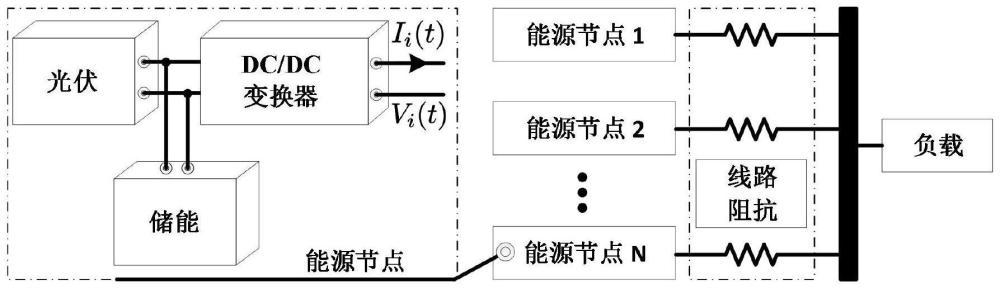
7、s11、太阳能无人机上能源微电网的结构简化为由多个能源节点构成的并联直流微电网,每个能源节点由光伏、储能和dc/dc变换单元构成;
8、根据母线设定电压和储能电池电压差异,dc/dc变换单元分为降压型buck和升压型boost,对于任意一个dc/dc变换单元,该能源节点均简化为具有一定功率输出能力的可控电压源;
9、在信息层,各个节点间通过交互信息来保证协同控制器获取邻居状态,即各个节点间的连接拓扑以无向连通图表征;
10、在并联直流微电网中,所有节点均考虑为理想可控电压源,输出电压vei(t)在区间[vmin,vmax]内任意调节,vmin和vmax分别为最小和最大输出电压;根据基尔霍夫定律,节点输出电流动态表示为:
11、
12、其中,vei(t)、iei(t)和vl(t)分别为输出电压、输出电流和母线电压,ri和li分别是线路阻抗的阻值和电感值;对于下标,i=1,2,…,n表示节点编号,n表示微电网的节点数量,e表示能源节点,l表示母线,t表示时间;
13、s12、通过以下紧凑形式表征总的直流微电网的电气关系:
14、
15、其中,yi=1/ri,y=[y1,t2,…,yn]t,[y]=diag(t1,t2,…,yn),ve(t)=[ve1(t),ve2(t),…,ven(t)]t,ie(t)=[ie1(t),ie2(t),…,ien(t)]t,il(t)为母线电流;t表示转置;
16、定义获得母线电压表达式为:
17、
18、根据每个节点的功率pei(t)=vei(t)iei(t),对各个节点的输出功率,写成向量形式:
19、
20、其中,
21、s13、对于协同优化控制来说,按照优化调度策略给出的出力系数实现两个控制目标:母线电压在设定电压范围内调节、能源节点按出力系数比输出功率;为此,将控制目标表述为固定时间内电压调节和固定时间内尺度功率分配;
22、定义1、如果在k时刻对于所有节点为能源节点的集合,保证成立,则称之为固定时间内尺度功率分配;其中,prj和prj分别是能源节点i和能源节点j的额定输出功率,pei(t)和pej(t)分别是能源节点i和能源节点j的实际输出功率;
23、定义2、如果在k时刻保证成立,则称之为固定时间内电压调节收敛;其中,vr是设定的母线电压,veavg(t)是所有节点输出电压的加权算术平均值,表示为:
24、
25、固定时间内电压调节误差ev和固定时间内尺度功率分配误差epi分别表示为:
26、
27、ev=lnveavg(t)-lnvr (7)
28、注意,ev=0与定义2中veavg(t)=vr是等价的;考虑式(4)和式(6),得到固定时间内尺度功率分配误差的紧凑形式:
29、
30、其中,lc为表征无向连通图的laplacian矩阵、pr=diag(pr1,pr2,…,prn)
31、根据式(7)获得固定时间内电压调节误差的表达式为:
32、
33、s14、对误差变量ep(t)和ev(t)求导,得到并联直流微电网误差动态模型如下:
34、
35、
36、其中,
37、优选的,步骤s2中,利用节点i自身的状态信息和邻居节点的功率信息,设计一个非线性电压误差动态观测器,估计电压调节误差ev(t),设计非线性电压误差动态观测器如下:
38、
39、
40、其中,kp,∈p1,∈p2和∈p3是可调增益;siga(x)=|x|asign(x),sigb(x)=|x|bsign(x),其中,a和b为常数,满足0<a<1,b>1,x表示任意变量。
41、优选的,步骤s3中,利用epi(t)和设计固定时间分布式协同控制器如下:
42、
43、epi(t)=∈p1epi(t)+∈p2siga(epi(t))+∈p3sigb(epi(t)) (15)
44、
45、其中,kv,∈v1,∈v2和∈v3是可调增益;
46、结合非线性电压误差动态观测器和固定时间分布式协同控制器得到整体控制结构;
47、将公式(14)代入公式(10)和公式(11),得到:
48、
49、
50、将公式(17)和(18)写成矩阵形式,得到:
51、
52、其中,令和公式(19)用紧凑形式表示为:
53、
54、优选的,步骤s4,理论分析观测器收敛性和系统稳定性。
55、1.分析电压误差估计和比例功率分配误差收敛性。
56、构建lyapunov函数如下:
57、
58、其中,q=diag(q1,q2,…,qn),qi为正的标量。对w(t)求导,得到:
59、
60、令进一步得到:
61、zi(t)=∈1zi(t)+∈2siga(zi(t))+∈3sigb(zi(t)) (23)
62、其中,∈1=diag(∈p1,∈v1),∈2=diag(∈p2,∈v2),∈3=diag(∈p3,∈v3)。将上式代入lyapunov函数的导数,得到:
63、
64、对于||z(t)||2,有:
65、
66、利用不等式放缩,获得以下不等式:
67、
68、
69、综上,得到:
70、
71、进一步,有
72、
73、其中,
74、同时,分别计算和得到:
75、
76、
77、综合考虑式(30)和式(31),计算如下公式:
78、
79、联合式(29),得到:
80、
81、引理1:考虑动态系统满足f(0)=0。该动态系统是固定时间收敛的,即如果存在一个连续可微的lyapunov函数v(x(t))满足以下条件:
82、1)v(x(t))是一个正定函数;
83、2)其中,a0,b0,a,b,k
84、为正数,满足ak<1和bk>1。
85、进一步,设定时间t通过下式计算:
86、
87、根据引理1,分析出误差动态系统变量能够在固定时间内收敛到零,即同时,获得设定时间:
88、
89、2.分析电压调节误差收敛性。
90、对式(12)左右两端同乘联合式(9),计算得到:
91、
92、根据步骤s4中电压误差估计和比例功率分配误差收敛性分析,已经证明当t>t时,误差变量ep(t)=0和综上,得到
93、设定初始状态ξe(0)=0,对式(13)左右两端积分,计算出:
94、
95、根据步骤s4,已知当t>t时ep(t)=0,进一步可知ep(t)=0。继而,当t>t时,
96、对于0<t<t,记作f(pr-1,lc,pe(t))。综上得到:
97、
98、进一步得到,可见,通过选取适当的常数pri,电压调整误差ev(t)将趋近于零的邻域附近。
99、因此,本发明采用上述一种并联直流微电网的固定时间分布式功率分配控制方法,其技术效果如下:
100、(1)采用基于非线性误差动态观测器的固定时间分布式协同控制技术,可以减少通信变量的个数,降低通信负担和组网复杂性。
101、(2)可以有效提升电压调节和比例功率分配误差收敛的动态性能。
102、(3)整体采用单层控制架构,能够降低控制应用的复杂性。
103、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!