基于PSO算法的VSG虚拟惯量控制方法与流程
本发明属于电力系统领域,涉及一种基于pso算法的vsg虚拟惯量控制方法。
背景技术:
1、随着可再生能源在总能源利用中所占比例不断增加,电力电子逆变器逐渐分布式能源接入电网的主要方式。尽管电力电子逆变器具有响应速度快的特点,但缺乏传统同步发电机的机械惯性和阻尼特性,无法提供并网系统所需的惯性和阻尼,过多地接入逆变器可导致系统的惯性水平显著下降,抗扰动能力减弱,甚至造成继电器设备误动。
2、虚拟同步机(virtual synchronous generator,vsg)是一种模拟传统同步发电机的运行特性和控制策略,在下垂控制的基础上加入转动惯量和阻尼环节,以提高并网系统的惯性和阻尼稳定的控制算法。虚拟同步机可以使系统适应不稳定的能源输入,从而提高整个电力系统的可靠性,有助于整合可再生能源,降低对传统发电机组的依赖,减少系统的频率和电压波动。如申请公开号为cn109256801b的发明专利,通过自适应调节虚拟同步发电机的虚拟惯量和虚拟阻尼系数,结合负载变化对逆变器系统的实时影响,逆变器根据负载状态实时给出最合理的虚拟惯量和虚拟阻尼的值,使得逆变器输出的电能质量更高。
3、在新能源逆变器大量接入电网和虚拟同步机优化策略不完善的背景下,提高系统频率稳定性及增强系统总体惯量水平对于新能源发电设备的推广应用有重要意义。传统vsg虚拟惯量一般考虑相同容量传统同步机惯量进行设置,现有技术中主要通过两种方式去优化vsg虚拟惯量问题,一是采用蒙特卡洛模拟法离线计算出不同扰动下的虚拟惯量最优解;二是采用智能算法来实时分配虚拟惯量,这两种方法在虚拟惯量分配方式上存在以下缺陷:
4、(1)现有虚拟惯量分配方法的设计前提是维持系统广义惯量水平,按照新能源机组增加量与惯量减少量的正比关系进行估算得到,没有考虑到实际扰动时惯量支撑的是系统不平衡功率,基于系统额定容量的广义系统惯性水平无法反映惯量对系统频率的影响。
5、(2)现有离线虚拟惯量优化方法大多基于单一模型进行离线优化计算,对于不同的并网模型缺乏通用性,且适用范围往往局限于所研究并网结构,没有考虑到电网后续的新能源并网需求,造成后续出现新的新能源并网接入时优化效果不佳。
6、(3)多数基于智能算法的动态实时分配虚拟惯量优化方法,通过实时采集vsg所控逆变器频率等数据,利用智能算法进行虚拟惯量的寻优,实现频率优化,其惯量响应时间较短,智能算法的迭代时长难以满足惯量即时响应的需求。实际并网系统中,在有限的采样间隔时长中智能算法无法快速收敛给出优化参数,对系统频率稳定的支撑效果有限。
7、对于新能源逆变器并网的虚拟同步机控制算法,如何优化计算vsg的虚拟惯量,使得出现系统扰动时确保系统频率不越界,并克服上述缺陷,保证系统频率稳定性是目前需要重点研究的问题。
技术实现思路
1、本发明的技术方案用于解决现有的vsg虚拟惯量控制方法难以实时、快速地对惯量优化,导致系统频率稳定性的问题。
2、本发明是通过以下技术方案解决上述技术问题的:
3、基于pso算法的vsg虚拟惯量控制方法,所述方法包括:
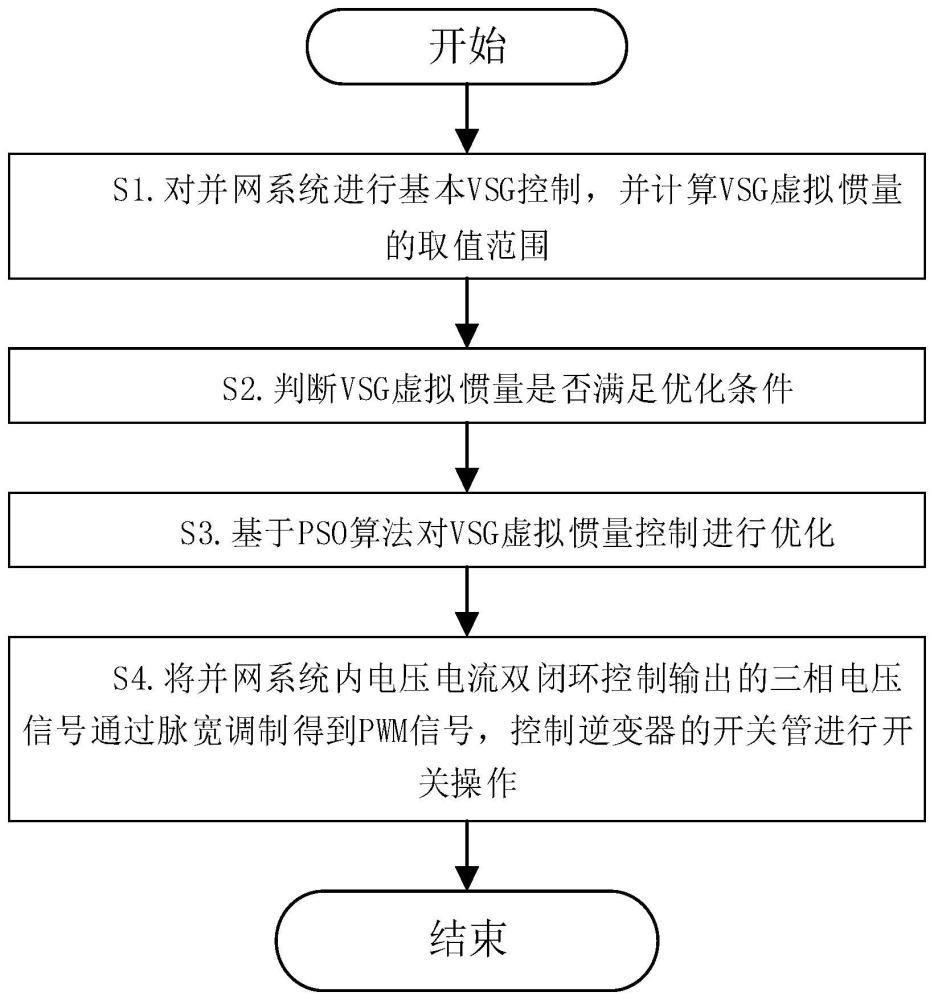
4、s1.对并网系统进行基本vsg控制,并计算vsg虚拟惯量的取值范围;
5、s11.采集逆变器输出端的三相输出电压和电流,进行派克变换,计算逆变器的有功功率和无功功率;
6、s12.对逆变器进行有功-频率和无功-电压下垂控制,根据有功-频率下垂控制得到有功功率偏差,根据无功-电压下垂控制得到输出电压幅值;
7、s13.根据系统传递函数得到有功功率偏差和频率偏移量的关系,逆变器进行vsg控制,基于有功功率偏差计算逆变器的输出电压频率,输出电压角频率与电压幅值合成得到电压矢量;
8、s14.根据系统需求确定最大功率波动下的频率波动量和频率调节后的频率波动量,计算达到频率极值点时间和vsg虚拟惯量的取值范围;
9、s2.判断vsg虚拟惯量是否满足优化条件;
10、s21.设定vsg初始虚拟惯量和有功功率波动阈值,计算并网侧的功率不平衡量;
11、s22.初始化逆变器功率采样时刻和迭代次数,计算采样时刻下并网侧的功率不平衡量;
12、s23.若并网侧的功率不平衡量超过有功功率波动阈值,则计算vsg虚拟惯量动态上界并执行步骤s3;
13、若并网侧的功率不平衡量未超过有功功率波动阈值,则将vsg初始虚拟惯量作为系统虚拟惯量参与vsg控制,执行步骤s4;
14、s3.基于pso算法对vsg虚拟惯量控制进行优化;
15、s31.初始化粒子种群个数、迭代次数和初始迭代粒子的取值范围,以虚拟惯量参数值为寻优粒子,建立综合优化目标函数;
16、s32.进行pso算法迭代,更新粒子的个体极值和群体的全局极值,并更新粒子的速度与位置;
17、s33.判断pso算法迭代结果是否满足收敛条件,若满足则结束搜寻过程,输出最优vsg虚拟惯量,参与逆变器vsg控制,执行步骤s4;若不满足,重复上述步骤s32;
18、s4.将并网系统内电压电流双闭环控制输出的三相电压信号通过脉宽调制得到pwm信号,控制逆变器的开关管进行开关操作。
19、进一步地,步骤s11中所述逆变器的有功功率和无功功率计算公式如下:
20、
21、式中,po为逆变器的有功功率,qo为逆变器的无功功率,vd、vq为三相输出电压在dq坐标系下的分量,id、iq为三相输出电流在dq坐标系下的分量。
22、进一步地,步骤s12中所述逆变器的有功功率偏差和输出电压幅值计算公式如下:
23、δp=(ω0-ω)kω+pref-po
24、e*=(qref-qo)kq+e0
25、式中,δp为逆变器的有功功率偏差,ω0为逆变器额定频率,ω为网侧频率,kω为逆变器有功下垂系数,pref为逆变器额定有功功率,e*为输出电压幅值,qref为逆变器额定无功功率,kq为逆变器无功下垂系数,e0为逆变器额定输出电压幅值。
26、进一步地,步骤s13中所述vsg控制的方程表达式如下:
27、
28、
29、ω*=ω0+δω
30、式中,j为系统虚拟惯量,为网侧频率变化率,d为系统阻尼因子,为电压相角变化率,δω为有功功率偏差经过虚拟惯量环节后得到的角频率变化量,ω*为输出电压角频率。
31、进一步地,步骤s14中所述达到频率极值点时间和vsg虚拟惯量的取值范围的计算公式如下:
32、
33、
34、
35、式中,tnadir为达到频率极值点时间,jmax为vsg虚拟惯量的取值上界,jmin为vsg虚拟惯量的取值下界,vsg虚拟惯量的取值范围为[jmin,jmax],δpmax为并网系统中最大容量机组解列功率,t为逆变器时间常数,δfmax为最大功率波动下的频率波动量,tmax为系统最大允许调频时间,δfmin为规定时间内频率调节后的频率波动量。
36、进一步地,步骤s23中所述vsg虚拟惯量动态上界计算公式如下:
37、
38、
39、jset.max=max{jδf,jrocof}
40、式中,jset.max为vsg虚拟惯量动态上界,jδf为频率变化量最大值时的虚拟惯量系数,jrocof为为频率变化率最大值时的虚拟惯量系数,rocofmax为频率变化率最大值。
41、进一步地,步骤s31中所述综合优化目标函数包括:适应度函数、等式约束条件、迭代粒子取值范围;所述适应度函数表达式如下:
42、
43、式中,δω为有功功率偏差经过虚拟惯量环节后得到的角频率变化量;
44、等式约束条件表达式如下:
45、
46、式中,jset为待优化虚拟惯量;
47、迭代粒子取值范围表达式如下:
48、jmin≤jset≤jset.max
49、式中,jset为待优化虚拟惯量,jmin为vsg虚拟惯量的取值下界,jset.max为vsg虚拟惯量动态上界。
50、进一步地,步骤s32中所述更新粒子速度计算公式如下:
51、vi(k+1)=wvi(k)+c1r1[pbest(k)-xi(k)]+c2r2[gbest(k)-xi(k)]
52、式中,vi(k)为第i个粒子在第k次迭代的速度矢量,vi(k+1)为第i个粒子在第k+1次迭代的速度矢量,w为粒子移动的惯性系数,pbest(k)为第k次迭代时粒子的个体极值,gbest(k)为第k次迭代时粒子的全局极值,c1代表粒子向自身历史最佳位置逼近的趋势惯性权重,c2代表粒子向群体历史最佳位置逼近的趋势惯性权重,r1和r2为粒子每次移动速度的随机值。
53、进一步地,步骤s32中所述更新粒子位置计算公式如下:
54、xi(k+1)=xi(k)+vi(k+1)
55、式中,xi(k)为第i个粒子在第k次迭代的粒子位置,xi(k+1)为第i个粒子在第k+1次迭代的粒子位置,vi(k+1)为第i个粒子在第k+1次迭代的粒子速度。
56、进一步地,步骤s33中所述收敛条件表达式如下:
57、
58、式中,为第k次迭代后的虚拟惯量参数,为第k-1次迭代后的虚拟惯量参数,ε为收敛间隙。
59、本发明的优点在于:本发明设计了一种扰动变化中动态调整虚拟惯量大小的控制方法,具有以下优点:
60、(1)本发明以频率偏差量和频率变化率最小为优化控制目标函数,以系统中最大容量机组解列作为最大扰动,考虑扰动出现时有功功率不平衡量的波动变化和惯量大小对系统稳定性的影响,通过优化求解,获取vsg虚拟惯量优化参数,能够实现新能源并网系统的最优频率运行,避免系统惯量不足增大触发低频减载的可能性,提高系统频率稳定性,提高新能源并网系统的抗干扰能力。
61、(2)本发明针对vsg虚拟惯量参数优化分配问题,区别于现有的离线优化参数计算,采用动态惯量参数调整方式,随有功功率不平衡量实时调整虚拟惯量参数,实现了系统频率稳定运行,不依赖于蒙特卡洛算法的典型场景迭代,提高了vsg控制的可靠性。
62、(3)在分布式控制中,本发明中vsg惯量参数变化只与逆变器输出侧的功率信息有关,信息传输量少,对通信拓扑要求不高,且具有一定的鲁棒性,参数优化工作以及功率计算皆在vsg内部进行,减少了vsg整体数据处理压力,且不依赖于特定的并网结构拓扑,降低了新增并网设备难度,提高了系统拓展性。
- 还没有人留言评论。精彩留言会获得点赞!