一种充电方法、机器人及其机器人充电系统与流程
本发明涉及机器人充电,特别涉及一种充电方法、机器人及机器人充电系统。
背景技术:
1、随着电子信息技术的不断发展,越来越多的智能化机器人开始被广泛的应用于许多不同的日常生活场景,例如帮助进行家庭院落清扫、去除积雪、收集掉落的物体等等。
2、这些智能机器人通常以电池和电机作为主要的动力来源,并在特定的工作区域中自动执行工作任务。为了确保工作任务的顺利完成,通常智能机器人会具备有自动充电功能(也可以被简称为回充功能),能够在自身电量较低的情况自行进行充电,以恢复电量。
3、典型的,智能机器人会通过基于摄像机识别、激光雷达标记或者红外雷达标记等的定位方式,返回移动至充电底座的位置。通过充电触点等与充电底座建立电连接,从而实现自动充电。例如,中国专利cn110221617a所描述的,其通过激光雷达标记的方式,指引机器人移动到机器人充电座。移动到机器人充电座的机器人可以通过电能输出导体建立电连接,进行充电。
4、但这样的自动充电实现方案存在较多的缺陷。例如,定位很容易受到恶劣天气(例如,强光、雨雪)的影响和干扰,造成定位不正确而无法正确返回机器人充电座的位置。而且,定位方式的整体方案繁琐复杂,实现成本较高。
技术实现思路
1、本发明实施例旨在提供一种充电方法、机器人及机器人充电系统,可解决现有自动充电方法之中,容易受到恶劣天气干扰,实现成本较高而且户外布置安全性较差的技术问题。
2、本发明实施例解决其技术问题采用以下技术方案:
3、本技术公开了一种充电方法。该方法包括:在进入充电状态后,机器人移动至预设的充电定位点;以所述充电定位点为起点,按照预设轨迹向充电区域移动;所述充电区域由电能提供设备形成;在沿所述预设轨迹移动的过程中,检测是否到达预设的目标充电位置;在到达所述目标充电位置时,控制所述机器人停止移动,并且通过所述机器人中的电能接收设备,接收由所述电能提供设备提供的电能。
4、上述充电方法在目标充电位置以外,预先设置相近的充电定位点的方式,可以极大的缩短机器人的定位时间,有利于机器人快速的移动到充电底座所在的位置。
5、在一种可能的实施方式中,所述方法还包括:在剩余电量降低至预设的充电电量阈值时,确定进入所述充电状态;或者,在接收到充电指令时,确定进入所述充电状态。
6、通过设置合适的充电电量阈值,可以确保机器人还有充足的电量支撑其返回充电底座完成自动充电,有效的避免了机器人因电量彻底消耗殆尽,导致需要使用者手动进行充电的操作,为机器人的日常使用提供便利。
7、在一种可能的实施方式中,在所述以所述充电定位点为起点,按照预设轨迹向充电区域移动的步骤前,所述方法还包括以所述充电定位点为起点,控制机器人移动至所述充电区域执行清扫任务;在确定所述清扫任务结束后,返回所述充电定位点;控制机器人旋转预设的角度,以使设置有所述电能接收设备的一端朝向所述充电区域。
8、通过在充电前先对充电底座形成的充电区域进行清扫的方式,可以确保充电的顺利进行,不会因充电底座上覆盖的积雪等杂物而导致充电失败等的情况的发生,可以被很好的应用于户外环境的部署。
9、在一种可能的实施方式中,所述以所述充电定位点为起点,按照预设轨迹向充电区域移动,具体包括:通过所述机器人中的传感器获取多个不同定位信标的磁感应强度变化情况;多个所述定位信标位于所述电能提供设备不同的位置;根据不同的所述定位信标的磁感应强度变化情况,确定所述机器人的移动方向是否偏离所述预设轨迹;在所述机器人的移动方向没有偏离所述预设轨迹时,控制所述机器人沿当前的移动方向移动;在所述机器人的移动方向偏离所述预设轨迹时,将所述机器人的移动方向调整为与所述预设轨迹一致。
10、通过感知磁感应强度变化的传感器和定位信标之间的相互配合,可以据此确定当前机器人的移动方向情况,以使其保持正确的移动轨迹。这样的定位方式相区别于传统的光学定位,具有较强的抗干扰能力,不容易受到恶劣天气或者环境的影响,而且整体实现成本低廉。
11、在一种可能的实施方式中,多个所述定位信标包括:用于产生第一磁场的第一定位信标、用于产生第二磁场的第二定位信标以及用于产生第三磁场的第三定位信标;所述根据不同的所述定位信标的磁感应强度变化情况,确定所述机器人的移动方向是否偏离所述预设轨迹,具体包括:在所述机器人中的传感器仅获取到所述第二磁场时,确定所述机器人的移动方向没有偏离所述预设轨迹;在所述机器人中的传感器获取到所述第一磁场或所述第三磁场时,确定所述机器人的移动方向偏离所述预设轨迹。
12、在一种可能的实施方式中,所述第二定位信标设置在所述预设轨迹上;所述第一定位信标和所述第三定位信标分别设置在所述预设轨迹的左侧和右侧;
13、所述在所述机器人的移动方向偏离所述预设轨迹时,将所述机器人的移动方向调整为与所述预设轨迹一致,具体包括:在所述机器人中的传感器获取到所述第一定位信标的第一磁场时,控制所述机器人后退预设的第一距离;在后退所述第一距离后,控制所述机器人向右移动预设的第二距离;在向右移动所述第二距离后,控制所述机器人重新向所述充电区域移动;或者在所述机器人中的传感器获取到所述第三定位信标的第三磁场时,控制所述机器人后退预设的第一距离;在后退所述第一距离后,控制所述机器人向左移动预设的第二距离;在向左移动所述第二距离后,控制所述机器人重新向所述充电区域移动。
14、该方法可以在移动过程中,方便简单的完成机器人的位置和方向调整,确保机器人能够顺利正确的移动到充电区域内,进行相应的充电操作。这样的定位方式相区别于传统的光学定位,具有较强的抗干扰能力,不容易受到恶劣天气或者环境的影响,而且整体实现成本低廉。
15、在一种可能的实施方式中,所述机器人移动至预设的充电定位点,具体包括:根据所述电能提供设备的位置,确定距离所述电能提供设备的位置预设距离阈值的所述充电定位点;基于rtk定位系统提供的位置信息,控制所述机器人移动至预设的信号强度点,并基于所述信号强度点移动至所述充电定位点。
16、通过rtk定位的方式,相对于其他典型的埋线或者uwb定位方式而言,具有更好的灵活性,便于在户外中使用和提供合适精度的定位结果。
17、本技术还公开了一种机器人。该机器人包括:工作设备;所述工作设备用于执行对应的工作任务;机器人本体;所述机器人本体与所述工作设备固定连接,用于拖动所述工作设备移动;电能接收设备;所述电能接收设备被设置在所述机器人本体上;以及传感器;所述传感器被设置在所述机器人本体上;其中,所述机器人本体被配置为:执行如上所述的充电方法。
18、在一种可能的实施方式中,所述工作设备设置在所述机器人本体的头部;所述电能接收设备和所述传感器均设置在所述机器人本体的尾部;
19、所述工作设备选自如下设备的一种或者多种:除雪设备,用于清扫积雪;高尔夫球回收设备;用于回收高尔夫球;割草设备,用于修整草坪;树叶清扫设备,用于清扫落叶。
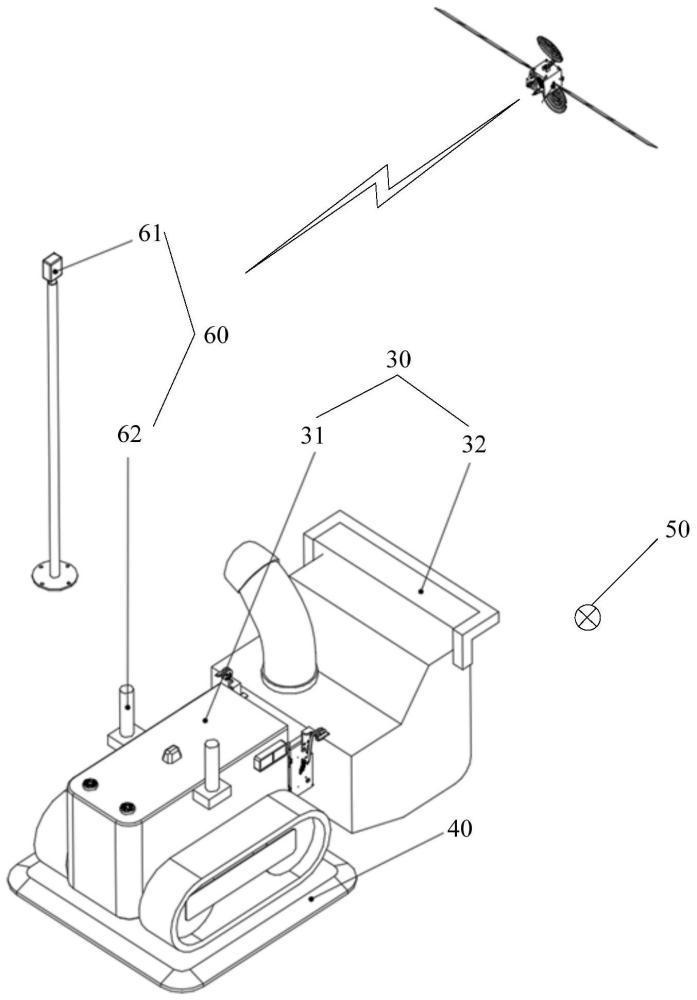
20、本技术还公开了一种机器人充电系统。该机器人充电系统包括:如上所述的机器人;充电底座;所述充电底座内设置有电能提供设备以及若干个定位线圈;rtk基站以及对应的rtk天线;所述rtk天线设置在所述机器人上;其中,所述电能提供设备形成充电区域;若干个所述定位线圈分别布置在不同位置,用于为所述机器人提供方向和位置信息指引。
21、在一种可能的实施方式中,所述电能提供设备包括:发射线圈;其中,所述发射线圈位于所述充电底座的中心,被收容在所述充电底座内部,并且在所述充电底座的上表面形成所述充电区域。
22、在一种可能的实施方式中,所述定位线圈包括:用于产生第一磁场的第一定位信标、用于产生第二磁场的第二定位信标、用于产生第三磁场的第三定位信标以及用于产生第四磁场的到位检测线圈;所述机器人设置有两个间隔设置的传感器;其中,所述第一磁场、第二磁场以及第三磁场具有不同的磁场频率;所述第一定位信标、第二定位信标和第三定位信标依次沿第一直线方向间隔设置,位于所述发射线圈的其中一侧;所述到位检测线圈设置在所述发射线圈的另一侧;所述到位检测线圈、所述发射线圈以及所述第二定位信标依次沿第二直线方向设置;其中,所述第一直线方向与所述第二直线方向相互垂直;所述第二定位信标的宽度大于所述两个传感器之间的间隔;所述到位检测线圈的宽度大于所述两个传感器之间的间隔;所述第一定位信标和第二定位信标的宽度小于所述两个传感器之间的间隔。
23、本技术实施例提供的充电方法通过在目标充电位置以外,预先设置相近的充电定位点的方式,可以极大的缩短机器人的定位时间,有利于机器人快速的移动到充电底座所在的位置。
- 还没有人留言评论。精彩留言会获得点赞!