一种电机稳定器的控制方法及系统
本发明提出了一种电机稳定器的控制方法及系统,涉及自动控制,具体涉及电机稳定器的自动控制。
背景技术:
1、在目前的社会生活中,稳定器的使用已经非常普遍,稳定器的使用为人类生活带来了很多便利,但在现有技术中仍然存在一些问题,在现有技术中,通常通过计算偏差量,对相机等物品进行位置的纠偏,但在纠偏过程中,可能会由于稳定器的响应速度下降或不够快,导致在稳定器纠偏过程中,存在持续的偏差累计,使得稳定器纠偏效率低和精度低,需要不断进行纠偏,耗费资源。
技术实现思路
1、本发明提供了一种电机稳定器的控制方法及系统,用以解决在现有技术的纠偏过程中,可能会由于稳定器的响应速度下降或不够快,导致在稳定器纠偏过程中,存在持续的偏差累计,使得稳定器纠偏效率低和精度低,需要不断进行纠偏,耗费资源的问题:
2、本发明提出的一种电机稳定器的控制方法及系统,所述方法包括:
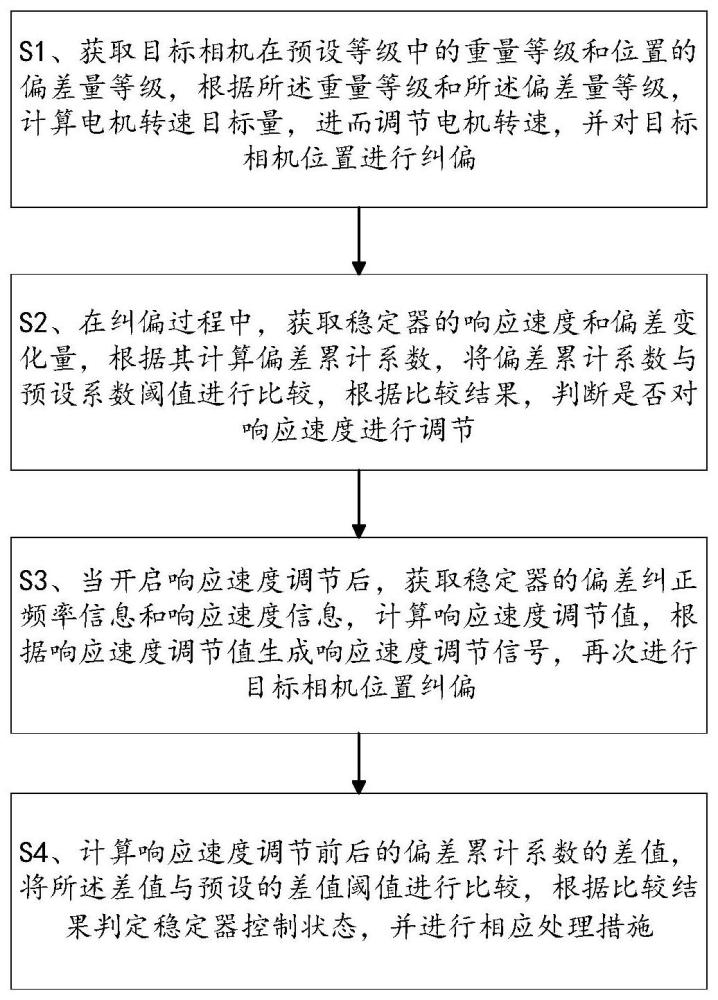
3、s1、获取目标相机在预设等级中的重量等级和位置的偏差量等级,根据所述重量等级和所述偏差量等级,计算电机转速目标量,进而调节电机转速,并对目标相机位置进行纠偏;
4、s2、在纠偏过程中,获取稳定器的响应速度和偏差变化量,根据其计算偏差累计系数,将偏差累计系数与预设系数阈值进行比较,根据比较结果,判断是否对响应速度进行调节;
5、s3、当开启响应速度调节后,获取稳定器的偏差纠正频率信息和响应速度信息,计算响应速度调节值,根据响应速度调节值生成响应速度调节信号,再次进行目标相机位置纠偏;
6、s4、计算响应速度调节前后的偏差累计系数的差值,将所述差值与预设的差值阈值进行比较,根据比较结果判定稳定器控制状态,并进行相应处理措施。
7、进一步地,所述s1包括:
8、s101、对不同种类相机进行重量等级划分,获得相机的多个不同重量等级;
9、对历史相机不同程度的位置偏差量进行偏差量等级划分,获得多个偏差量等级;
10、在多个所述重量等级和所述偏差量等级中,获取稳定器控制的目标相机的重量等级和偏差量等级,根据所述目标相机的重量等级和偏差量等级计算用于控制所述目标相机的电机转速目标量,根据所述电机转速目标量对稳定器的电机转速进行调节;
11、s102、在进行电机转速调节之后,稳定器根据预设控制参数,控制电机对目标相机位姿进行调节,在调节过程中实时计算目标相机的位置偏差,当目标相机发生位置偏差时,稳定器对目标相机位置进行纠偏。
12、进一步地,所述s2包括:
13、s201、在纠偏过程中设置多个单位时间,在每个单位时间分别获取稳定器的响应速度和偏差变化量,根据每个单位时间的响应速度和偏差变化量计算每个单位时间的偏差累计系数;
14、所述偏差累计系数的计算公式为:
15、
16、其中,kpl为偏差累计系数,δfx为发出纠偏信号至稳定器开始响应的时长变化量,δxs1为稳定器开始响应时长至响应结束时长变化量,j为δfx+δxs1的总时长变化量内的偏差量变化次数,δpbi为第i次的偏差量的增长变化量,xs2为单位时间内的稳定器的响应速度,xs3为纠偏过程中,稳定器历史平均响应速度;
17、s202、将每个单位时间的偏差累计系数与预设系数阈值进行比较,当所述偏差累计系数大于所述预设系数阈值时,开始响应速度的调节,当所述偏差累计系数小于等于所述预设系数阈值,不进行响应速度的调节。
18、进一步地,所述s3包括:
19、s301、当开启响应速度的调节后,获取稳定器在最近一个单位时间内的偏差纠正频率,根据所述最近一个单位时间内的偏差纠正频率、偏差累计系数和稳定器的响应速度,计算稳定器的响应速度调节值;
20、所述响应速度调节值的计算公式为:
21、
22、其中,txs为响应速度调节值,kpl为偏差累计系数,pu1为单位时间内偏差纠正频率,pu2为纠偏过程中,稳定器历史平均偏差纠正频率,xy为稳定器在最近一个单位时间的响应速度;
23、s302、对响应速度调节值进行串级pid控制处理,获得响应速度调节值对应的pid值,根据所述响应速度调节值对应的pid值生成响应速度调节信号,通过所述响应速度调节信息对稳定器的响应速度进行调节,调节完成后对相机位置进行再次纠偏。
24、进一步地,所述s4包括;
25、s401、获取响应速度调节前的最后一个单位时间的偏差累计数据和响应速度调节后的第一个单位时间的偏差累计系数,计算两者的差值;
26、s402、将所述差值与预设的差值阈值进行比较,当所述差值大于所述差值阈值时,稳定器控制为合格状态;当所述差值小于等于所述差值阈值时,稳定器控制为不合格状态,对稳定器的响应速度调节值进行重计算,对响应速度进行重调节。
27、进一步地,所述系统包括:
28、等级划分调节模块,用于获取目标相机在预设等级中的重量等级和位置的偏差量等级,根据所述重量等级和所述偏差量等级,计算电机转速目标量,进而调节电机转速,并对目标相机位置进行纠偏;
29、计算判断模块,用于在纠偏过程中,获取稳定器的响应速度和偏差变化量,根据其计算偏差累计系数,将偏差累计系数与预设系数阈值进行比较,根据比较结果,判断是否对响应速度进行调节;
30、计算调节模块,用于当开启响应速度调节后,获取稳定器的偏差纠正频率信息和响应速度信息,计算响应速度调节值,根据响应速度调节值生成响应速度调节信号,再次进行目标相机位置纠偏;
31、差值比较模块,用于计算响应速度调节前后的偏差累计系数的差值,将所述差值与预设的差值阈值进行比较,根据比较结果判定稳定器控制状态,并进行相应处理措施。
32、进一步地,所述等级划分调节模块包括:
33、等级获取模块,用于对不同种类相机进行重量等级划分,获得相机的多个不同重量等级;
34、对历史相机不同程度的位置偏差量进行偏差量等级划分,获得多个偏差量等级;
35、在多个所述重量等级和所述偏差量等级中,获取稳定器控制的目标相机的重量等级和偏差量等级,根据所述目标相机的重量等级和偏差量等级计算用于控制所述目标相机的电机转速目标量,根据所述电机转速目标量对稳定器的电机转速进行调节;
36、纠偏模块,用于在进行电机转速调节之后,稳定器根据预设控制参数,控制电机对目标相机位姿进行调节,在调节过程中实时计算目标相机的位置偏差,当目标相机发生位置偏差时,稳定器对目标相机位置进行纠偏。
37、进一步地,所述计算判断模块包括:
38、累计系数计算模块,用于在纠偏过程中设置多个单位时间,在每个单位时间分别获取稳定器的响应速度和偏差变化量,根据每个单位时间的响应速度和偏差变化量计算每个单位时间的偏差累计系数;
39、所述偏差累计系数的计算公式为:
40、
41、其中,kpl为偏差累计系数,δfx为发出纠偏信号至稳定器开始响应的时长变化量,δxs1为稳定器开始响应时长至响应结束时长变化量,j为δfx+δxs1的总时长变化量内的偏差量变化次数,δpbi为第i次的偏差量的增长变化量,xs2为单位时间内的稳定器的响应速度,xs3为纠偏过程中,稳定器历史平均响应速度;
42、判断调节模块,用于将每个单位时间的偏差累计系数与预设系数阈值进行比较,当所述偏差累计系数大于所述预设系数阈值时,开始响应速度的调节,当所述偏差累计系数小于等于所述预设系数阈值,不进行响应速度的调节。
43、进一步地,所述计算调节模块包括:
44、调节值计算模块,用于当开启响应速度的调节后,获取稳定器在最近一个单位时间内的偏差纠正频率,根据所述最近一个单位时间内的偏差纠正频率、偏差累计系数和稳定器的响应速度,计算稳定器的响应速度调节值;
45、所述响应速度调节值的计算公式为:
46、
47、其中,txs为响应速度调节值,kpl为偏差累计系数,pu1为单位时间内偏差纠正频率,pu2为纠偏过程中,稳定器历史平均偏差纠正频率,xy为稳定器在最近一个单位时间的响应速度;
48、调节纠偏模块,用于对响应速度调节值进行串级pid控制处理,获得响应速度调节值对应的pid值,根据所述响应速度调节值对应的pid值生成响应速度调节信号,通过所述响应速度调节信息对稳定器的响应速度进行调节,调节完成后对相机位置进行再次纠偏。
49、进一步地,所述差值比较模块包括:
50、差值计算模块,用于获取响应速度调节前的最后一个单位时间的偏差累计数据和响应速度调节后的第一个单位时间的偏差累计系数,计算两者的差值;
51、调节判断模块,用于将所述差值与预设的差值阈值进行比较,当所述差值大于所述差值阈值时,稳定器控制为合格状态;当所述差值小于等于所述差值阈值时,稳定器控制为不合格状态,对稳定器的响应速度调节值进行重计算,对响应速度进行重调节。
52、本发明有益效果:
53、本发明提出了一种电机稳定器的控制方法及系统,通过获取目标相机在预设等级中的重量等级和位置的偏差量等级,根据重量等级和偏差量等级来计算电机转速目标量,从而实现对电机转速的精确调节,进而实现对目标相机位置的精确纠偏。通过获取重量等级和位置的偏差量等级可以对不同重量和不同程度偏差量的相机进行针对性电机转速调节,实现了用于控制不同相机的电机转速针对性调节,使得不同种类型的相机都呢能能到灵活合适的控制;在纠偏过程中,通过获取稳定器的响应速度和偏差变化量,计算偏差累计系数,将偏差累计系数与预设系数阈值进行比较,根据比较结果判断是否对响应速度进行调节,实现了对偏差累计的大小和可能造成影响程度的计算,判断是否进行响应速度调节。在避免不必要的计算和调节的同时,实现对偏差累计的监控当开启响应速度调节后,获取稳定器的偏差纠正频率信息和响应速度信息,计算响应速度调节值,根据响应速度调节值生成响应速度调节信号,再次进行目标相机位置纠偏,从而提高了系统的响应速度和稳定性。解决因响应速度慢导致偏差累计的问题计算响应速度调节前后的偏差累计系数的差值,将差值与预设的差值阈值进行比较,根据比较结果判定稳定器控制状态,并进行相应处理措施,从而确保了系统的可靠性和稳定性。本稳定器控制方法具有精确、快速、可靠等优点,能够提高拍摄效果和拍摄效率。
- 还没有人留言评论。精彩留言会获得点赞!