多伺服驱动采煤机截割部的力矩最优控制方法
本发明涉及采煤机的自动控制,具体为一种多伺服驱动采煤机截割部的力矩最优控制方法。
背景技术:
1、煤矿开采领域的发展非常迅速。采煤机作为该领域的关键机电设备之一,对其进行研究具有重要意义。齿轮传动系统中的电机和传动齿轮是一个不可分割的整体。在运行过程中,电机与传动齿轮相互作用,物理过程众多,耦合关系复杂。近年来,电机-齿轮传动系统机电耦合动力学的研究受到了一些学者的重视。传统的采煤机驱动方式一直以单电机驱动为主,主要采用电机驱动采煤机进行齿轮切割,进而实现采煤。然而,面对坚硬的煤壁或较低的采煤效率,单一的伺服驱动模型不足以满足生产需求。多驱动采煤机系统可以有效地解决这一物理问题,并在新型采煤机的制造领域得到了广泛的应用。
2、具有多个驱动电机的新型采煤机截断短程驱动系统在以前的采煤机中没有使用,但类似的机电多驱动系统已应用于其他国防和工业系统,如火炮系统、大型雷达系统、风力涡轮机偏航控制系统。在过去的几年里,人们对这种多功率电机驱动的机电伺服系统进行了大量的研究。然而,新型多电机短程推进系统的最优控制问题在各种文献和专利中较少涉及。因为新型多电机短程推进系统包括一个截断齿轮系统和多个驱动电机模型,这些模型组成了大型复杂耦合系统,需要解决其实现最优控制的难题。
技术实现思路
1、本发明为了解决采煤机的新型多电机短程推进系统的最优控制问题,提供了一种多伺服驱动采煤机截割部的力矩最优控制方法。
2、本发明是通过如下技术方案来实现的:一种多伺服驱动采煤机截割部的力矩最优控制方法,包括如下步骤:
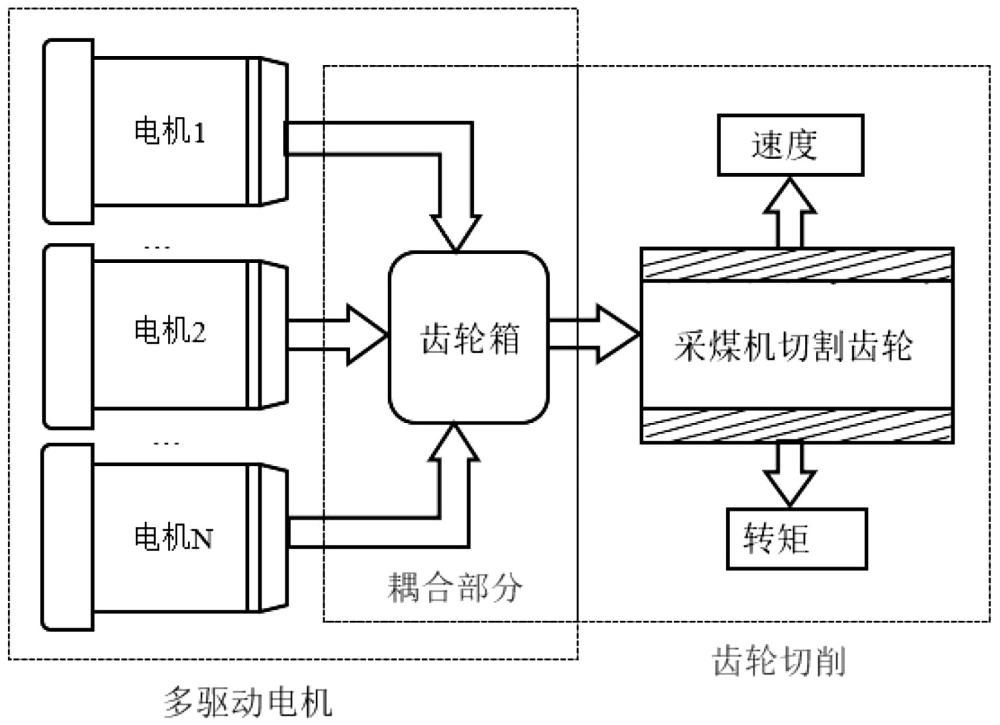
3、s1:基于动力学机理,建立包括多个电机和截割齿轮系统的煤矿截割部系统,煤炭切割段的多驱动系统建模为:
4、 (1)
5、其中是电机系统的多个电机模型,其为负载提供动力;是多输入负载系统;n是驱动电机编号,和分别表示采煤齿轮的角位置和速度;是采煤齿轮的角加速度;和是多驱动电机的角位置和角速度;是电动机阻尼,是截割部阻尼系数;是采煤齿轮的转动惯量,是来自第i个电机的输入力矩,和是电机小齿轮和负载大齿轮的转矩圆的半径,是用于煤矿开采的转矩,是第i个电机的转矩;
6、s2:采煤机截割部多驱动负载模型最优性能指标构建,建立包含驱动电机和负载的综合性能指标,具体如下:
7、s2-1:针对电机模型,是采煤机齿轮机构的需要输入转矩,是驱动电机的输入力矩;多驱动电机转矩和速度的性能指标函数表示为
8、,其中
9、,保证了齿轮和电机状态的最佳性能,并且能耗最低,、、和为给定的对应矩阵;因为采煤齿轮的性能比电机的性能更重要,所以电机的权重应该比齿轮的重量小;
10、s2-2:针对采煤机负载模型,采煤齿轮的扭矩和速度的性能指标函数为:,其中;
11、s3:根据所建立模型实现神经网络的最佳逼近,在线学习各驱动电机和负载的神经网络性能指标的最佳神经网络权值参数,具体如下:
12、s3-1:最优性能指标分别定义为:
13、 ;
14、;
15、s3-2:引入神经网络分别逼近为:
16、
17、,;
18、其中,和是激活函数,神经网络参数和的参数估计方法给定如下:
19、分别设计两个性能指标的哈密尔顿雅克比贝尔曼方程如下:
20、
21、<mstyle displaystyle="true" mathcolor="#000000"><mo>+</mo><msup><mrow><mo>(</mo><mrow><msubsup><mover accent="true"><mi>w</mi><mo>^</mo></mover><mi>b</mi><mi>t</mi></msubsup><mi>∇</mi><mi>φ</mi><mi>(</mi><msub><mover accent="true"><mi>θ</mi><mo>˙</mo></mover><mi>bw</mi></msub><mi>)</mi></mrow><mo>)</mo></mrow><mi>t</mi></msup><mrow><mo>(</mo><mrow><mfrac><mn>1</mn><msub><mi>j</mi><mi>bw</mi></msub></mfrac><mi>[</mi><mstyle displaystyle="true"><munderover><mo>∑</mo><mrow><mi>i</mi><mi>=</mi><mn>1</mn></mrow><mi>n</mi></munderover><msub><mi>f</mi><mi>pi</mi></msub></mstyle><mi>(</mi><mi>t</mi><mi>)</mi><msub><mi>r</mi><mi>bbw</mi></msub><mi>−</mi><mi>π</mi><msub><mover accent="true"><mi>θ</mi><mo>˙</mo></mover><mi>bw</mi></msub><mi>−</mi><msub><mi>t</mi><mi>bw</mi></msub><mi>(</mi><mi>t</mi><mi>)]</mi></mrow><mo>)</mo></mrow></mstyle>
22、
23、<mstyle displaystyle="true" mathcolor="#000000"><mo>+</mo><msup><mrow><mo>(</mo><mrow><mi>∇</mi><msubsup><mi>φ</mi><mi>pi</mi><mi>t</mi></msubsup><msub><mover accent="true"><mi>w</mi><mo>^</mo></mover><mi>pi</mi></msub></mrow><mo>)</mo></mrow><mi>t</mi></msup><mrow><mo>(</mo><mrow><mfrac><mn>1</mn><msub><mi>j</mi><mi>pi</mi></msub></mfrac><mi>[</mi><mi>−</mi><msub><mi>f</mi><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)</mi><msub><mi>r</mi><mi>bpi</mi></msub><mi>−</mi><msub><mi>ℏ</mi><mi>i</mi></msub><msub><mover accent="true"><mi>θ</mi><mo>˙</mo></mover><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)</mi><mo>+</mo><msub><mi>t</mi><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)]</mi></mrow><mo>)</mo></mrow></mstyle>
24、令和,
25、和<mstyle displaystyle="true" mathcolor="#000000"><msub><mi>ξ</mi><mi>pi</mi></msub><mi>=∇</mi><msubsup><mi>φ</mi><mi>pi</mi><mi>t</mi></msubsup><mrow><mo>(</mo><mrow><mfrac><mn>1</mn><msub><mi>j</mi><mi>pi</mi></msub></mfrac><mi>[</mi><mi>−</mi><msub><mi>f</mi><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)</mi><msub><mi>r</mi><mi>bpi</mi></msub><mi>−</mi><msub><mi>ℏ</mi><mi>i</mi></msub><msub><mover accent="true"><mi>θ</mi><mo>˙</mo></mover><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)</mi><mo>+</mo><msub><mi>t</mi><mi>pi</mi></msub><mi>(</mi><mi>t</mi><mi>)]</mi></mrow><mo>)</mo></mrow></mstyle>;
26、则得到如下滤波矩阵:
27、,;
28、则和的估计方法设计为:
29、和;
30、s4:采煤机截割部多驱动负载系统最优控制设计,根据所学参数和多伺服系统驱动模型,设计各电机的最优求解力矩,具体如下:
31、最优多驱动采煤机负载输入力矩为:<mstyle displaystyle="true" mathcolor="#000000"><msubsup><mover accent="true"><mi>f</mi><mo>^</mo></mover><mi>pi</mi><mrow /></msubsup><mi>=−</mi><mfrac><mn>1</mn><mn>2</mn></mfrac><msubsup><mi>r</mi><mi>i</mi><mrow><mi>−</mi><mn>1</mn></mrow></msubsup><mi>[</mi><mfrac><msub><mi>r</mi><mi>bbw</mi></msub><msub><mi>j</mi><mi>bw</mi></msub></mfrac><msup><mi>]</mi><mi>t</mi></msup><mrow><mo>(</mo><mrow><mi>∇</mi><msubsup><mi>φ</mi><mi>b</mi><mi>t</mi></msubsup><msubsup><mover accent="true"><mi>w</mi><mo>^</mo></mover><mi>b</mi><mrow /></msubsup></mrow><mo>)</mo></mrow></mstyle>;
32、每个电机输入力矩为:<mstyle displaystyle="true" mathcolor="#000000"><msubsup><mover accent="true"><mi>t</mi><mo>^</mo></mover><mi>pi</mi><mrow /></msubsup><mi>=−</mi><mfrac><mn>1</mn><mn>2</mn></mfrac><msubsup><mi>r</mi><mi>ii</mi><mrow><mi>−</mi><mn>1</mn></mrow></msubsup><mi>[</mi><mfrac><mn>1</mn><msub><mi>j</mi><mi>pi</mi></msub></mfrac><msup><mi>]</mi><mi>t</mi></msup><mrow><mo>(</mo><mrow><mi>∇</mi><msubsup><mi>φ</mi><mi>pi</mi><mi>t</mi></msubsup><msubsup><mover accent="true"><mi>w</mi><mo>^</mo></mover><mi>pi</mi><mrow /></msubsup></mrow><mo>)</mo></mrow></mstyle>;
33、其中先求,根据求得。
34、本发明所述的最优控制方法,首先构建多电机负载系统的数学模型,包括驱动电机和负载模型两部分;应用神经网络逼近驱动电机和负载的指标函数;基于驱动电机和负载模型的耦合关系,获得最优的驱动电机控制力矩,实现多电机负载系统的综合性能最优。
35、与现有技术相比本发明具有以下有益效果:本发明所提供的一种多伺服驱动采煤机截割部的力矩最优控制方法,实现采煤机的大功率截割推进效果,可以有效提升采煤效率,增加产量;同时,应用了自适应动态规划方法以研究受扰采煤机截割段中多电机驱动齿轮系统的最佳扭矩,以实现采煤机伺服系统控制的近似最佳效果;使采煤机截割部伺服系统以转速稳定、能耗近似最优的方式工作。
- 还没有人留言评论。精彩留言会获得点赞!