仿生蛇形巡检机器人及巡检方法与流程
本发明涉及高压线路检修,尤其涉及一种仿生蛇形巡检机器人及巡检方法。
背景技术:
1、在电能传输中必须依靠高压输电线路,由于输电线路分布广,所处地形复杂,自然环境恶劣,电力线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,需要及时修复或更换。这就要对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况,线路周围环境的变化情况等,以便及时发现和消除隐患,预防事故的发生,确保供电安全。
2、传统的人工巡检方法不仅工作量大而且条件艰苦,特别是跨越大江大河的输电线路的巡检,存在很大的困难,甚至有一些巡检项目靠常规方法难以完成。随之无人机巡线也越来越多的得到使用,但无人机巡线也存在突出的缺点:主要表现在受高压电磁场干扰大,巡检往往需要靠近高压导、地线,此时会出现遥控操作失灵、图线画面不清晰。另外无人机续航能力差、受天气环境影响较大、操控难度大。
技术实现思路
1、本发明的目的在于提供一种仿生蛇形巡检机器人及巡检方法,能长期在输电线路段巡检,替代传统人工巡检和无人机巡检作业,受天气环境影响小、操控简单,提高巡检效率。
2、为达此目的,本发明采用以下技术方案:
3、仿生蛇形巡检机器人,包括:
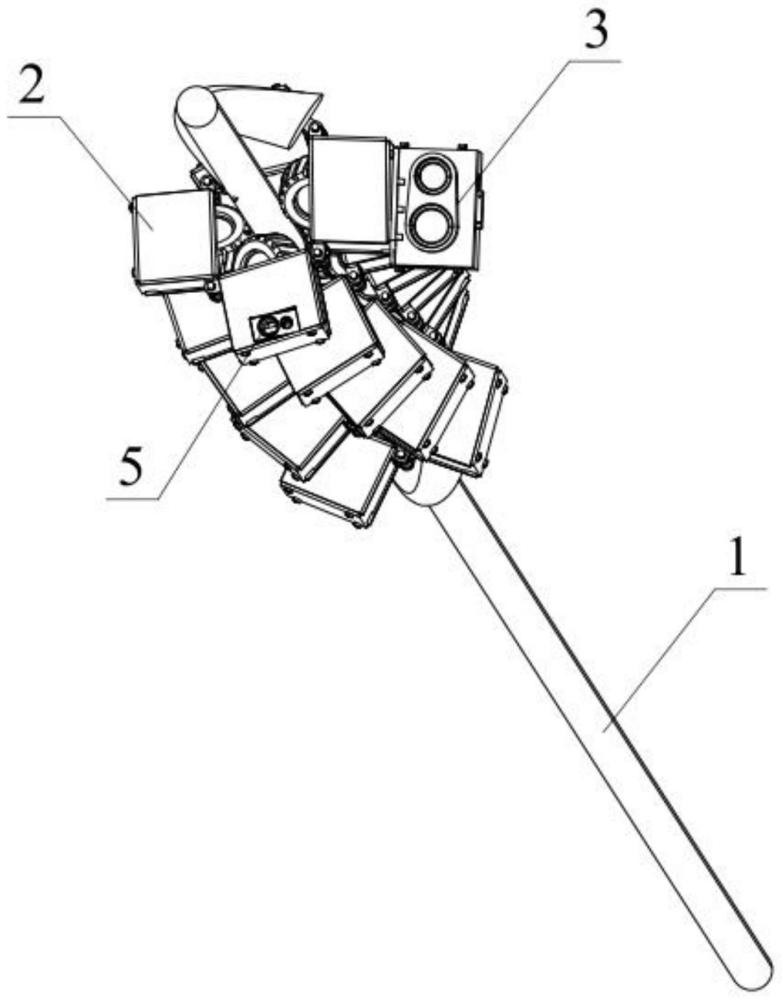
4、本体节组件,所述本体节组件设置多个,每个所述本体节组件均包括壳体,所述壳体内设置有驱动件,所述驱动件的输出端连接有抵接轮,所述抵接轮至少部分穿出所述壳体,
5、连接组件,所述连接组件连接相邻的两个所述壳体,以能够使多个所述本体节组件串联,并且能够呈蛇形螺旋环绕于电缆上,所述连接组件使所述抵接轮保持抵接所述电缆的趋势;
6、视觉检测件,位于首尾两端的所述本体节组件至少其中一个设置有所述视觉检测件,所述视觉检测件设置在所述壳体上,以能够对所述电缆进行视觉检测。
7、作为优选,所述连接组件包括插接轴和扭力弹簧,相邻的所述壳体上转动插接于所述插接轴,所述扭力弹簧的凸出端部限位插接于相邻的两个所述壳体上。
8、作为优选,所述壳体包括侧板和底板,所述底板的其中一端设置有两个间隔的第一凸起,所述底板的另一端设置有两个间隔的第二凸起,两个所述第一凸起之间的距离与两个所述第二凸起之间的距离不同,所述插接轴插接于所述第一凸起与所述第二凸起,两个所述第一凸起之间与两个所述第二凸起之间均设置有插接孔,以能够供所述扭力弹簧的凸出端部插接。
9、作为优选,位于首尾两端的所述本体节组件上还设置有导向触角,所述导向触角为半螺旋状,所述导向触角的一端与所述壳体通过所述连接组件连接,以使所述导向触角保持螺旋环绕所述电缆的趋势。
10、作为优选,所述导向触角的尺寸由靠近所述壳体的一端向远离所述壳体的一端逐渐变小。
11、作为优选,设置所述视觉检测件的所述本体节组件还设置有测距传感器,所述测距传感器设置在所述壳体上。
12、作为优选,所述壳体内设置有蓄电池,所述蓄电池与所述驱动件连接。
13、作为优选,所述壳体外设置有太阳能电池板,所述太阳能电池板连接所述蓄电池。
14、作为优选,所述壳体内设置有控制组件,所述控制组件与所述驱动件、所述视觉检测件连接,并与外部的控制装置信号连接。
15、还提供一种巡检方法,利用如上所述的仿生蛇形巡检机器人,包括如下步骤:
16、将所述仿生蛇形巡检机器人螺旋环绕于电缆上,使所述抵接轮抵接于所述电缆;
17、驱动所述仿生蛇形巡检机器人沿所述电缆螺旋行走,并通过所述视觉检测件巡视检查所述电缆。
18、本发明的有益效果:
19、进行巡检操作时,只需将上述串联的本体节组件呈蛇形螺旋环绕于电缆上,并通过控制驱动件驱动抵接轮旋转,即可使仿生蛇形巡检机器人沿电缆螺旋行走,进而通过设置在壳体上的视觉检测件对电缆进行视觉检测;从而能够能长期在输电线路段巡检,替代传统人工巡检和无人机巡检作业,并且该仿生蛇形巡检机器人受天气环境影响小、操控简单,提高巡检效率。
技术特征:
1.仿生蛇形巡检机器人,其特征在于,包括:
2.根据权利要求1所述的仿生蛇形巡检机器人,其特征在于,所述连接组件(4)包括插接轴(41)和扭力弹簧(42),相邻的所述壳体(21)上转动插接于所述插接轴(41),所述扭力弹簧(42)的凸出端部限位插接于相邻的两个所述壳体(21)上。
3.根据权利要求2所述的仿生蛇形巡检机器人,其特征在于,所述壳体(21)包括侧板(212)和底板(211),所述底板(211)的其中一端设置有两个间隔的第一凸起(213),所述底板(211)的另一端设置有两个间隔的第二凸起(214),两个所述第一凸起(213)之间的距离与两个所述第二凸起(214)之间的距离不同,所述插接轴(41)插接于所述第一凸起(213)与所述第二凸起(214),两个所述第一凸起(213)之间与两个所述第二凸起(214)之间均设置有插接孔(219),以能够供所述扭力弹簧(42)的凸出端部插接。
4.根据权利要求1所述的仿生蛇形巡检机器人,其特征在于,位于首尾两端的所述本体节组件(2)上还设置有导向触角(27),所述导向触角(27)为半螺旋状,所述导向触角(27)的一端与所述壳体(21)通过所述连接组件(4)连接,以使所述导向触角(27)保持螺旋环绕所述电缆(1)的趋势。
5.根据权利要求4所述的仿生蛇形巡检机器人,其特征在于,所述导向触角(27)的尺寸由靠近所述壳体(21)的一端向远离所述壳体(21)的一端逐渐变小。
6.根据权利要求1所述的仿生蛇形巡检机器人,其特征在于,设置所述视觉检测件(3)的所述本体节组件(2)还设置有测距传感器(5),所述测距传感器(5)设置在所述壳体(21)上。
7.根据权利要求1所述的仿生蛇形巡检机器人,其特征在于,所述壳体(21)内设置有蓄电池(26),所述蓄电池(26)与所述驱动件(22)连接。
8.根据权利要求7所述的仿生蛇形巡检机器人,其特征在于,所述壳体(21)外设置有太阳能电池板(25),所述太阳能电池板(25)连接所述蓄电池(26)。
9.根据权利要求1所述的仿生蛇形巡检机器人,其特征在于,所述壳体(21)内设置有控制组件,所述控制组件与所述驱动件(22)、所述视觉检测件(3)连接,并与外部的控制装置信号连接。
10.巡检方法,利用如权利要求1-9任一所述的仿生蛇形巡检机器人,其特征在于,包括如下步骤:
技术总结
本发明属于高压线路检修技术领域,公开了一种仿生蛇形巡检机器人及巡检方法,仿生蛇形巡检机器人包括本体节组件、连接组件以及视觉检测件,本体节组件串联设置多个,每个本体节组件均包括壳体,壳体内设置有驱动件,驱动件的输出端连接有抵接轮,抵接轮至少部分穿出壳体,连接组件连接相邻的两个壳体,连接组件使抵接轮保持抵接电缆的趋势;位于首尾两端的本体节组件至少其中一个设置有视觉检测件,视觉检测件设置在壳体上;巡检方法,利用上述的仿生蛇形巡检机器人,串联的本体节组件呈蛇形螺旋环绕于电缆上,仿生蛇形巡检机器人沿电缆螺旋行走,替代传统人工巡检和无人机巡检作业,操控简单,提高巡检效率。
技术研发人员:李伟,李窕,林畅宏,吴轶,黄远飞,陈淙达,余宇,陆爽,陈镒宏,杨惠强
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!