LC滤波型同步磁阻电机自阻尼预测电流控制方法及系统
本发明涉及一种lc滤波型同步磁阻电机自阻尼预测电流控制方法及系统,属于电力电子与电力传动领域。
背景技术:
1、同步磁阻电机因其高效率、高功率密度和高可靠性等优点已经被广泛应用于工业生产中。如今宽禁带半导体材料发展迅速,基于宽禁带半导体器件的同步磁阻电机驱动系统因其开关速度快、开关频率高,在高速电主轴、飞轮储能等高速化领域中得到了更广阔的应用前景,是目前国际领域研究的热点之一。但是高开关频率的功率器件在改善驱动系统性能的同时,会产生更高的d v/d t,引发严重的共模干扰问题,直接影响到电机的正常工作而降低其运行稳定性。此外,还会加剧电机端过电压的现象,加快电机绝缘损伤甚至烧毁电机,对生产作业造成恶劣的影响。针对上述问题,在驱动电机的逆变器输出端加装lc滤波器是一种高效方便的解决方式,由此形成了lc滤波型同步磁阻电机驱动系统。但是lc滤波器会与同步磁阻电机的定子电感形成lcl谐振效应,直接影响系统的稳定性与可靠性。而且,由于系统控制阶数的上升,对于传统线性控制器的参数整定工作量提出较大的挑战。因此,亟需针对lc滤波型同步磁阻电机驱动系统探索一种结构简单、运行稳定可靠的控制方法。
2、预测控制因其原理简单、动态响应快,在多目标控制和条件约束处理等方面具有很大的优越性,现今在同步磁阻电机驱动领域中得到了广泛地应用。目前,针对于lc滤波型同步磁阻电机的预测控制主要分为外加阻尼环路的预测控制和基于多目标优化的预测控制两种。基于外加阻尼环路的预测控制需要添加额外的阻尼控制环去抑制系统的lcl谐振问题,这无疑增加了控制系统的实现复杂度。而基于多目标优化的预测控制则需要引入多个权重参数,而权重参数整定目前仍是国内外尚未解决的问题。因此,这两种预测控制方案都不可避免的涉及到多种设计参数(如:阻尼系数、权重参数)的选择问题,参数整定工作量较大,进一步加剧了控制系统设计的复杂度,从而降低了系统运行的可靠性。
技术实现思路
1、针对现有技术的不足之处,提供了一种lc滤波型同步磁阻电机自阻尼预测电流控制方法及系统。其在不添加额外阻尼环路的前提下,通过推导具有自阻尼特性的电机定子电流预测模型及无权重参数的代价函数,在对定子电流进行约束的同时实现了对滤波器电感与电容能量的间接调控,成功地解决了lc滤波型同步磁阻电机的谐振问题,提升了系统运行的稳定性。并且,本方法避免了繁杂的权重参数调节过程,结构简单且易于实现,非常适用于工程化应用。
2、为实现上述技术目的,本发明提供了一种lc滤波型同步磁阻电机自阻尼预测电流控制方法及系统,包括以下步骤:
3、步骤1:在各个采样周期内对lc滤波型同步磁阻电机的状态变量进行采样,包括:三相lc滤波器(各相滤波电感输入端与逆变器各相输出端相连,各相滤波电容一端与滤波电感输出端相连,另一端公共接于星形点)的电感电流、电容电压、同步磁阻电机三相定子电流及其电角度 θ;然后将上述状态变量的三相采样值通过park变换得到d-q同步旋转坐标系下的状态变量值:,,;
4、步骤2:根据步骤1中得到的lc滤波型同步磁阻电机在d-q同步旋转坐标下的状态变量值,借助一阶前向欧拉法建立各个状态变量所对应的离散动力学模型: if ( k+1), vf ( k+1), is ( k+1);
5、步骤3:根据步骤2中所建立的lc滤波型同步磁阻电机离散动力学模型,进一步推导出具有自阻尼特性的定子电流预测模型: isp ( k+1);
6、步骤4:根据步骤3中推导出的具有自阻尼特性的定子电流预测模型,构建出一种无权重参数的定子电流跟踪代价函数 j;
7、步骤5:对步骤4中构建的无权重参数的定子电流跟踪代价函数,采用二次型函数最优化理论求解出d-q同步旋转坐标系下的逆变器最优电压参考 vi*。然后对其进行park反变换,得到α-β静止坐标系下的逆变器最优电压参考表达式 viα*和 viβ* ;
8、步骤6:将步骤5中所求得的逆变器最优电压参考值 viα*和 viβ*,经过空间矢量脉宽调制技术生成控制脉冲信号应用于逆变器开关管,以实现对lc滤波型同步磁阻电机的自阻尼预测电流控制。
9、进一步,所述步骤2中lc滤波型同步磁阻电机各个状态变量的离散动力学模型由下式的一阶前向欧拉法建立:
10、
11、
12、
13、式中,“ k”和“ k+1”分别表示在第 k和 k+1个采样时刻, vi为d-q同步旋转坐标系下逆变器输出电压, a x、 b x( x = 1,2,3)为离散模型矩阵,其具体表达式为:
14、
15、
16、
17、式中, lf为滤波电感, rf为滤波电感寄生电阻, cf为滤波电容, ωe为由同步磁阻电机电角速度 θe微分得到的电角速度, rs为同步磁阻电机定子电阻, ld和 lq为同步磁阻电机d-q同步旋转坐标系下的定子电感, ts为采样周期。式中, lf为滤波电感, rf为滤波电感寄生电阻, cf为滤波电容, ωe为由同步磁阻电机电角速度 θe微分得到的电角速度, rs为同步磁阻电机定子电阻, ld和 lq为同步磁阻电机d-q同步旋转坐标系下的定子电感, ts为采样周期。式中, lf为滤波电感, rf为滤波电感寄生电阻, cf为滤波电容, ωe为由同步磁阻电机电角速度 θe微分得到的电角速度, rs为同步磁阻电机定子电阻, ld和 lq为同步磁阻电机d-q同步旋转坐标系下的定子电感, ts为采样周期。
18、进一步,为了实现对电机定子电流未来状态的有效预测,采用 k+1时刻滤波电感电流值 if ( k+1)替代滤波电容电压离散动力学模型中的 if ( k),从而得出 k+1时刻滤波电容电压的预测值 vf ( k+1),再用此预测值 vf ( k+1)替代电机定子电流离散动力学模型中的 vf ( k),即可推导出所述步骤3中具有自阻尼特性的电机定子电流预测模型,其具体表达式如下:
19、
20、式中, isp ( k+1) = [ isdp( k+1) isqp( k+1)]为 k+1时刻d-q同步旋转坐标系下电机定子电流预测矩阵。
21、进一步,根据步骤3推导出的具有自阻尼特性的定子电流预测模型可知,该模型中固有的包含了滤波电感电流和滤波电容电压变量,故可对定子电流进行跟踪控制的同时实现对滤波器谐振能量的有效调控,从而实现谐振自阻尼。基于此原理,可构建出步骤4中所述的无权重参数的定子电流跟踪代价函数如下:
22、
23、式中, is* = [ isd* isq*]表示d-q同步旋转坐标系下电机的定子电流参考矩阵。
24、进一步,所述步骤5采用二次型函数最优化控制理论对步骤4构建的无权重参数的定子电流跟踪代价函数 j进行逆变器电压参考最优解的推导,以保证定子电流在下一个控制周期中达到其参考值。具体来说,通过如下公式求取代价函数 j的极小值:
25、
26、即可得出逆变器最优电压参考的表达式为:
27、
28、式中, vi*=[ vid* viq*]表示d-q同步旋转坐标系下逆变器电压参考矩阵。
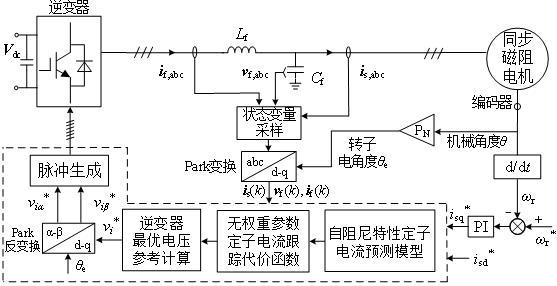
29、一种lc滤波型同步磁阻电机自阻尼预测电流控制方法所使用的lc滤波型同步磁阻电机自阻尼预测电流控制系统,其特征在于:包括顺序连接的自阻尼特性定子电流预测模型模块、无权重参数定子电流跟踪代价函数模块、逆变器最优电压参考计算模块、变换模块、脉冲生成模块,其中自阻尼特性定子电流预测模型模块通过输入 k时刻采样的d-q同步旋转坐标系下lc滤波器电感电流 ifd ( k), ifq ( k)、电容电压 vfd ( k), vfq ( k)以及同步磁阻电机的定子电流 isd ( k), isq ( k),计算出 k+1时刻的电机定子电流预测值;无权重参数定子电流跟踪代价函数模块通过自阻尼特性定子电流预测模型模块的输出建立了基于自阻尼特性定子电流跟踪的代价函数;逆变器最优电压参考计算模块利用定子电流跟踪代价函数和二次型函数最优化理论,计算出最优逆变器电压参考值;最后,逆变器最优电压参考计算模块的输出通过变换模块传输至脉冲生成模块。
30、自阻尼特性定子电流预测模型模块,用以构建无权重参数定子电流跟踪代价函数 j;
31、逆变器最优电压参考计算模块,用以计算出能够使该代价函数 j取得极小值的逆变器最优电压参考;
32、变换模块,用以将d-q同步旋转坐标系下的逆变器最优电压参考值通过park反变换转换到α-β静止坐标系下;
33、脉冲生成模块,用以将α-β静止坐标系下的逆变器最优电压参考值进行空间矢量脉宽调制,以生成控制逆变器开关管的脉冲信号。
34、与现有技术相比,本发明的有益效果为:
35、1、本发明提供的方法无需添加任何额外阻尼环路,通过推导出具有自阻尼特性的电机定子电流预测模型,实现了对滤波器电感与电容能量的间接调控,成功地解决了lc滤波型同步磁阻电机固有的谐振问题,保证了系统运行的稳定性和可靠性;
36、2、本发明提供的方法所构建的无权重参数的定子电流跟踪代价函数避免了繁杂的权重参数调节过程,因此具有结构简单、易于实现的优点,非常适用于工程化应用。
- 还没有人留言评论。精彩留言会获得点赞!